地铁车辆走行部温度目标可视化监测方法
2021-09-16张冠男
张冠男




摘 要:绝大多数深度学习应用领域是基于可见光条件,有关红外热成像温度场景中的应用较少。本文考虑使用Yolov3深度学习算法框架对地铁车辆车底关键红外目标进行动态识别及温度监测,通过对大量的数据进行训练学习,利用深度卷积神经网络提取到多样抽象的特征。同时,将获取到的原始温度视频流数据进行解析,并对单帧红外热图进行滤波处理,提高图片中目标物的清晰度,利用多项式拟合进行关键目标温度的误差补偿。通过测试证明,该网络对于目标定位及识别具有较高精度,并且同一趟列车不同轴位的目标温度具有较好的一致性。
关键词:深度学习;Yolov3;红外热成像;温度;目标识别
中图分类号:U279.3 文献标识码:A
0 引言
城市轨道交通车辆运行安全及稳定性十分重要。本文温度数据来源于车辆走行部温度检测系统,该系统位于轨道两侧及中间,利用工业红外热像仪实现列车车底轴箱、齿轮箱等关键发热部件的温度动态监测。在实际应用场景中,车底关键目标的动态监测常常伴随场景遮挡、物距变化及一些环境因素。同时,红外热图则是通过感知目标物与周围温度的差异进行成像,物体之间又同时伴随着能量的交互,这些物理特征便会导致红外图像的轮廓边缘模糊及对比度下降 [1-3]。
深度学习算法可以广泛用于各种复杂条件下的各类场景。数据驱动建模及加速运算平台的支撑。目前,已被广泛应用在人脸识别、智能家居等领域中。本文基于深度学习对红外场景进行目标检测,并通过搭建卷积神经网络实现对深度学习算法的优化及改进,力求对目标物进行准确的识别。
1 Yolov3目标识别算法原理
本文选择深度学习算法框架中的Yolo算法进行车底关键发热目标的定位识别。FasterR-CNN相比于R-CNN及FastR-CNN,拥有更快的检测速率,但是从搜索方式来看,计算时间仍然较长。具体过程是:首先,获取特征图;其次,获取标记框的特征信息;最后,利用分类器分类并结合回归器进一步优化标记框的位置。
Yolov3在运行过程中,则是将目标分类转换成数据训练,在整个网络中的输出层回归目标位置,输出类别,极大地改善运算效率。具体过程是:首先,利用分类器和定位器执行检测流程;其次,结合模型及图像位置尺度,计算评分;最后,将评分最优的目标区域定义为可视化结果[4-5]。
整个网络的检测准确率则是与网络层数密切相关,层数越多,则表征效果越好。Yolov3采用残差网络结构,能够在对大量数据执行训练的过程中保证训练结果向着收敛的方向进行。同时,在深度网络环境中,多通道卷积层彼此之间没有形成相互关联,这种隔层链接的方式可以大大提高目标预测的效率 [6]。
2 数据集准备及模型训练
2.1 训练样本
本文采用的数据集是将轨边红外热像仪实时保存的列车走行部温度视频流进行数据解析。检测项点暂定为车侧轴箱、齿轮箱及联轴节,见图1至图2。
考虑到神经网络模型的泛化能力及后期特征提取的鲁棒性,选取了隧道内不含目标物的其他负样本数据,为数据的训练提供较为丰富及全面的数据集。
2.2 数据处理
本文涉及到的红外热成像轴温检测系统采集到的视频经过解析后得到红外热图。由于红外图像与可见光图像差异较大,红外图像因为其特殊的物理特性存在目标物边界模糊、背景与目标对比度较低,给模型的训练及特征提取增加了难度。因此,需要对原始图像数据进行滤波降噪处理。
常见的滤波方法有均值滤波、中值滤波、高斯滤波及双边滤波等。本文选择双边滤波算法,目的是利用算子中对灰度信息的权重分配优势,即在领域内,灰度值越接近中心点的权重越大。
2.3 模型训练
借助图像标注工具完成一定数量的含目标物的样本数据标注,包括分类及目标框位置。训练数据的过程包括:首先,配置训练网络框架参数(batchsize、subdivisions、channels、学习率、步长等);其次,修改yolo層的相关参数(滤波器数量、anchors、类别数量等);最后,不断调整上述配置参数,优化模型。
本文中采用的数据集是上万张包含目标物的正样本及不包含目标物的负样本组成,二者等比例存放。原始输入图片的大小为384*288,一批次的输入数量为64,初始的学习率为0.001。开始训练后,数据集在模型迭代至5 000次时,loss值出现明显下降趋势。随着训练迭代次数增加,loss值逐渐趋于平缓。当训练日志中出现很多的错误度量指标,则需要在avg指标不再下降的时候停止训练,而平均loss值越低说明训练效果越好。最终,整个训练指标应使得loss值最终分布在0.05至3.0之间。
3 测温精度校准
3.1 红外热成像温度标定
本文所述列车车底走行部关键部件温度检测的主要技术难题之一在于保证其温度检测的准确性。
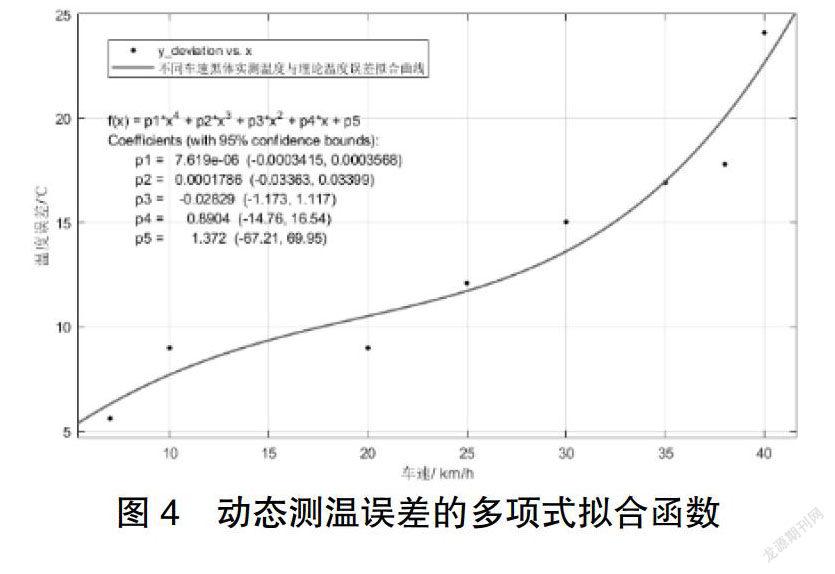
首先,需要借助具有标准辐射热源性质的装置(黑体:辐射率为1的理想热源)帮助确定运动过程中带来的真实测量温度与实际温度偏差。具体思路是:搭载已知设定温度的黑体热源以不同的速度通过红外热像仪前端,将画面中的黑体捕获并标记其温度数值,将理论温度与不同速度下的实测温度做减法,即可得到一组误差数据作为拟合的对象。下图3和4分别实验获取的黑体动态测温结果及与真实值的偏差。
3.2 动态测温误差拟合及温度补偿
在3.1节基础之上,本文选择一种普适的数据拟合算法用于实现有限数据量的高精度拟合。在实际应用中,根据一些孤立的测试数据很难直接确定数值之间的相关性。
(1)确定误差拟合函数。首先,将动态黑体标定实验得到的实测黑体温度数值与理论设定温度数值做减法并作为模型的输入量。同时,按照不同的测试运动速度依次存成一维数组y=[y1 y2 y3 y4…yi](i=1~n);
其次,记录并将不同的实验运动速度存入另一个数组x=[x1 x2 x3 x4…xi](i=1~n);
然后,确定上述输入数据的拟合精度e及初始阶次为1阶;
调用ployfit函数得到拟合数组p = [p1 p2 p3 p4 … pn],再次调用后计算速度数组x关于p相应的函数值y’ = [y’1 y’2 y’3 … y’n],并计算y与y’两个数组中对应项误差绝对值的总和的平方E,即E =;
最后,完成多次循环迭代直至E (2)温度补偿。在(1)中计算的高阶误差拟合函数将被用于走行部温度监测系统中,根据轨边传感器信号实现的具体步骤是:1)列车所有车轴依次通过布置在轨道上并且保持固定间距为L的两只车轮传感器,当车轮驶过1号传感器后会记录时刻t1,驶过2号传感器后会记录时刻t2,t2>t1;2)已知两只传感器固定间距后会依次计算每根车轴通过速度v = L / ( t2-t1 );3)调用(1)中的误差拟合函数,依次将每根车轴的误差补偿值计算出来并补偿到实测温度数值上。 4 总结与展望 本文首先介绍了深度学习区域定位中的常用算法模型,重点叙述Yolov3网络及其优势。针对红外热图等复杂场景,能够快速捕获并计算关键目标物位置;其次,开展相关黑体动态温度检测及误差分析,评估移动目标的红外热成像测温准确性及精度;最后,选择多项式函数逼近的方法对速度-温度误差函数进行拟合,找到相关性并进行真实目标的温度补偿,实现较好的同车目标物测温数据的一致性。 参考文献: [1]李意.智能弹药红外目标搜索研究[D].西安工业大学,2018. [2]乔立永,徐立新,高敏.红外图像复杂度对目标检测性能的影响[J].红外与激光工程,2013(S1):253-261. [3]卢珊.红外目标检测识别技术研究[D].长春理工大学,2008. [4]朱晨阳,冯虎田,欧屹.基于YOLOv3的人臉自动跟踪摄像机器人系统研究[J].电视技术,2018(9):64-69+91. [5]戴伟聪,金龙旭,李国宁,等.遥感图像中飞机的改进YOLOv3实时检测算法[J].光电工程,2018(12):84-92. [6]徐小婷.基于深度学习的红外场景目标检测技术研究[D].中北大学,2019.