海外露天矿北斗高精度位移安全监测系统研究*
2021-09-15杜素忠张录彬周耀东易国鹏
杜素忠 张录彬 周耀东 易国鹏
(万宝矿产有限公司蒙育瓦铜矿 北京 100053)
0 引言
边坡稳定性、地基沉降、地表变形等位移安全是露天矿山的主要安全风险因素,需要进行实时监测,否则容易引发重大事故。海外露天矿山普遍占地面积广,监测点位多、布局分散、精度要求高,矿山内公共通信资源受限、新技术应用少,位移监测多数依靠传统测量方式,工作效率低、实时性不强、高精度测量过程复杂。基于导航卫星(Global Navigation Satellite System, GNSS)空间定位原理,本文提出一种以北斗导航系统(BeiDou Navigation Satellite System,BDS)为主、美国全球定位系统(Global Positioning System, GPS)和俄罗斯导航卫星系统(Global naya Navigatsionnaya Sputnikovaya Sistema, GLONASS)为辅的海外露天矿山位移安全实时在线监测预警系统,精度高、针对性强,可满足海外露天矿山24 h连续在线位移监测要求。
蒙育瓦铜矿位于缅甸石皆省境内,由L矿和S&K矿两个大型矿山组成,项目占地面积超过50 km2,采剥总量超过1.5亿t/a,属亚洲目前最大湿法冶金铜矿山。随着生产的推进,矿山位移安全风险逐年升高,需对采场和排土场边坡稳定性[1]、旋回破碎站基础变形、中间料堆和堆浸场沉降等进行监测。本文结合蒙育瓦铜矿案例介绍系统原理,说明系统具体应用方法和效果。
1 位移监测
现有位移安全监测技术包括大地测量、无人遥感、雷达干涉和GPS定位监测等。大地测量为传统方法,属先测量、后分析;无人遥感[2-3]和大地测量原理类似,但测量载体和分析方法不同;合成孔径或真实孔径雷达干涉[4]多用于边坡稳定性监测,但需配备专用车辆或在特定角度和位置安装,且容易受到外部干扰,存在一定局限性。
以GPS为代表的GNSS监测[5-6]是依靠导航卫星定位功能,实现对目标的实时定位监测分析后触发预警。受GPS系统限制,海外矿山存在可观测GPS卫星数量有限、信号波动大、信息完整度不高、监测数据远程传输不便等情况,导致监测精度不够、预警不及时,影响安全生产。目前,国内已有部分关于BDS代替GPS的报道[7],但原理、结构和通用性等方面尚不能指导构建完整系统。
1.1 距离测定
GNSS由控制段、空间段和用户段组成。其中,控制段由主控站、监测站、地面天线和相关处理资源等组成,用于监视、控制和更新空间段卫星信息;空间段主要指导航卫星,负责通过信号正确播发卫星位置、速度和时间;用户段是应用终端,通过用户接收机测量其与卫星的距离,确定接收机精确位置。用户接收机由天线、低噪声放大器、射频前端、基带信号处理器等组成,用于接收卫星播发的原始电磁信号,并最终将电学参数转换成数字信号,获取卫星星历。假设没有外部干扰,发射时钟与接收时钟同步,则j时刻用户接收机到卫星的距离pj为
pj=c·(t2-t1)
(1)
式中,c为传播速度,无干扰时为真空光速;t1为卫星发生信号时刻;t2为用户接收机接收信号时刻;t2与t1的差为信号传播时间。
卫星信号包含导航电文、伪距码和载波三要素。伪距码和载波具有固定结构,可用来计算传输时间。根据传输时间计算方法不同,可分为伪距码相位测距和载波相位测距。导航电文按照固定结构帧发送,伪距码相位测距中,t1为
t1=T0+(n+f)·τ
(2)
τ=N·Tc
(3)
式中,T0为参考发射时间;τ为伪距码周期;n为完整伪距码总片数;f为伪距码小数部分;N为一个伪距码周期;Tc为码片长度。
载波相位测距中,t1和t2分别为
(4)
式中,k为常数,将相位转换为相应起始时刻的时间;n1、n2为未知整数,表示从任意参考时刻开始经过的2π弧度整数;φ1、φ2为相应相位分数部分。由于n1、n2无法直接测量,二者之差被称为“整周期模糊度”,需借助一个就近初始值迭代完成解算。
伪距码相位测距和载波相位测距误差比为
(5)
式中,E为测距误差比,也可表示信号传播时间计算误差比;△pcod为伪距码相位测距误差;△pcar为载波相位测距误差;fc为载波频率;rc为码片速率。因卫星载波频率比码片速率高很多倍,故载波相位测距比码片相位测距准确度高。但载波相位测距存在“整周期模糊度”问题,增大了测距计算复杂度,需要长期数据积累后计算,不适合实时定位解算。
1.2 监测点定位
导航电文根据控制段修正值、卫星运行状态生成并进行播发,包括卫星星历数据、时间戳、修正位置、预测状态、修正时间、测距误差、摄动参数、时钟漂移等。不考虑误差的理想状况下,在任意时刻j,用户接收机观测并接收卫星i的导航电文后,可计算出该卫星位置Sij为
Sij=[xij,yij,zij]
(6)
需要求解的监测点用户接收机位置Uj为
Uj=[xuj,yuj,zuj]
(7)
Sij与Uj的距离pj为
(8)
优选4颗卫星,建立四元非线性方程组,可解算用户接收机位置。
1.3 应用方法
海外矿山位移安全监测中,根据生产条件选定监测点,建设以用户接收机为核心的位移监测站,实现位移监测,监测内容包括水平位移和高程位移。蒙育瓦铜矿L矿建设8套监测站,S&K矿建设11套监测站,分别实现采区、排土场、破碎站、堆场等位移安全监测。位移监测站基本结构如图1所示,包括辅助立柱、高精度接收机、测量型天线、太阳能供电系统和客户前置(Customer Premise Equipment, CPE)。其中,CPE通过无线传输模式与矿区长期演进技术(Long Term Evolution, LTE)基站形成通信链路[8],实现位移监测站信息完整传输。

图1 监测站结构
2 高精度定位
2.1 误差分析
在实际应用中,不能忽略用户接收机观测过程误差,否则定位将出现重大偏差,影响位移监测效果。位移安全监测时的常见误差如表1所示,其中常数误差在信号发射前就存在,相关误差与用户位置和地理位置存在相关性,非相关误差与用户位置有关、与地理位置不存在相关性。
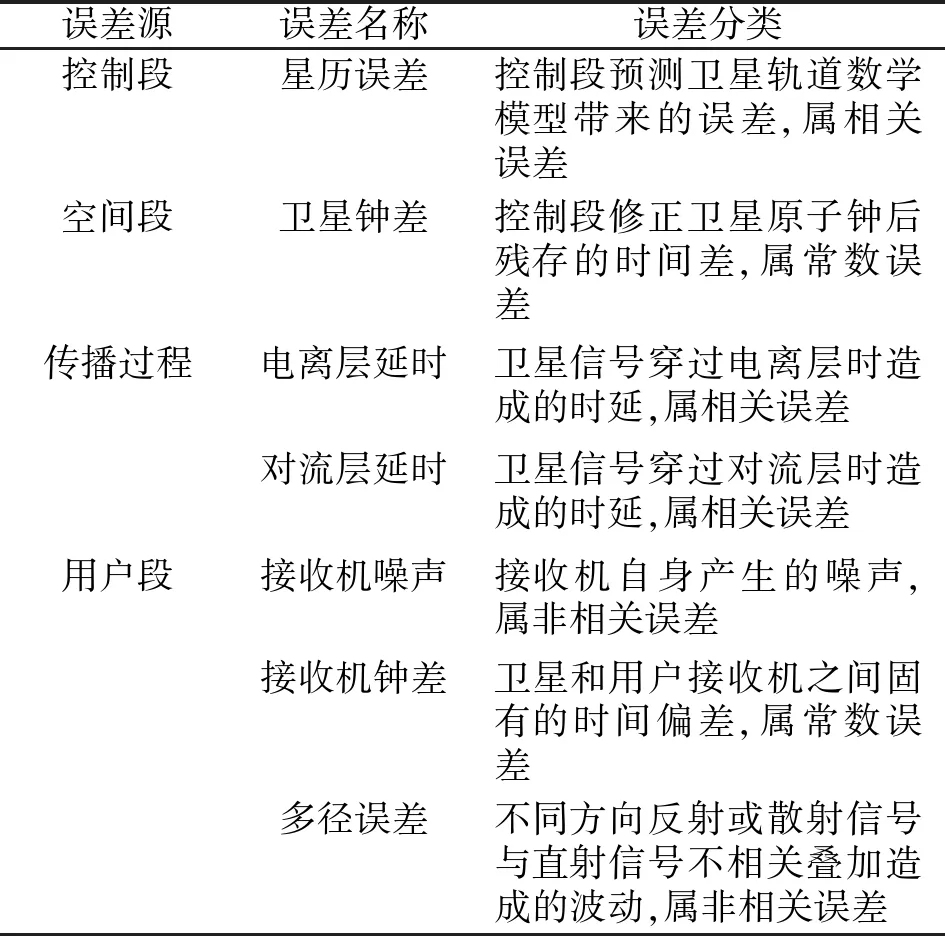
表1 常见误差分析
考虑误差,任意时刻j实际观测距离Rj与pj的关系为
Rj=pj+c·△tu+c·△ts+△reph+△rion+△rtrp+△m+ε
(9)
式中,△tu为接收机钟差;△ts为卫星钟差;△reph为星历误差带来的测距误差;△rion为电离层延时引起的测距误差;△rtrp为对流层延时引起的测距误差;△m为由多径等引起的测距误差;ε为用户接收机本身噪声引起的测距误差。
2.2 差分定位
差分定位分为位置差分和距离差分,可消除共性误差、减小相关误差。位移安全监测系统中,采用式(9)进行距离差分,即借助事先已知精确位置的高精度基准站,通过基准站测量值及其相关信息,减弱或消除星历误差、卫星钟差、接收机钟差、对流层延时误差等对监测站定位的影响。
因测距方法不同,差分定位可分为伪距差分定位和载波相位差分定位。载波相位差分定位精度高于伪距差分定位,但基准站和监测站需采集和存储足够数据,通过数据后处理产生修正值来修正监测站误差,得到后验精确位置。在露天矿山位移安全监测中,伪距差分定位更适合实时定位解算和位移监测,载波相位差分定位更适合以后处理解算为基础的位移趋势分析。
伪距差分定位分为绝对差分定位和相对差分定位。相对差分定位中,基准站向监测站不仅播发误差信息,还提供距离观测量;伪距差分定位中,相对差分结果为载波相位差分提供初始值,求解“整周期模糊度”,实现位移趋势监测、预测和预警。
服务范围及定位精度要求决定了基准站数量。为保证精度,系统将基准站附近5 km区域定义为服务范围,超出基准站服务范围后,监测站精度将不能满足位移监测要求。
2.3 电离层误差
即使在基准站服务范围内,监测站和基准站电离层误差仍不同,差分定位不能消除电离层误差,需要依靠接收机双频或多频接收能力。这是通过GDS和GLONASS校正BDS的原因之一。
设接收机存在两个或以上接收频率,分别选择f1和f2两个频率,在任意时刻j,f1实际观测距离为R1j,f2实际观测距离为R2j,用户位置pj为
(10)
(11)
2.4 应用方法
蒙育瓦铜矿选择以BDS为主、GPS和GLONASS为辅的用户接收机作为基准站和监测站主要设备,实现多频接收、消除定位误差。不同类型接收机数据格式可基本保持一致,但监测站接收机和基准站接收机之间的噪声差异也会产生误差,无法完全抵消,选择同型号设备有利于减小噪声误差影响。接收机主要指标如表2所示,基准站和监测站的区别在于使用的天线类型不同。
L矿和S&K矿距离超过8 km,因此在L矿和S&K矿各建立了一个高精度基准站,结构如图2所示,用于向所在区域播发信息。基准站通过有线网络接入矿区工业互联网[9]。

表2 接收机主要技术参数

续表2
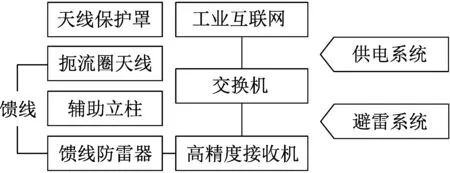
图2 基准站结构
同时,采用专用解算软件实现载波相位差分定位计算:基准站和监测站将观测信息发送至专用解算软件进行数据接收、存储和解算,通过伪距差分实现监测站实时定位精度水平误差约20 mm、高程误差约30 mm[10];通过载波相位差分实现监测站后处理定位精度水平误差约2 mm、高程误差约3 mm,利于分析长期位移趋势。
系统中差分定位所需高精度基准站已知位置是由接收机14 d不间断接收获取卫星星历后,通过解算专业软件和离线高精度定位解算对比获得,并非来自传统测量。这要求高精度基准站选址地点要非常牢固,避免因基准站位移带来位移安全监测失败;同时,基准站应该选择在地势开阔位置,避免多径误差。
2.5 卫星选择
在减小或消除误差的基础上,由式(7)求解Uj需要接收机至少观测到4颗以上卫星,单一卫星信号强度应高于30 dbm,且卫星越分散,定位精度越高。在实际应用中,可观测卫星数量和类型越多,越便于基准站和监测站选择最优组合以提高定位精度。
应用发现,蒙育瓦铜矿内不同位置GPS可观测卫星数量在5~12颗,信号在30 dbm上下波动,周跳引起接收机累计值重置明显,对载波差分定位有影响;BDS在可观测卫星数量、信号稳定性和完整性等方面则更优。
3 系统集成
根据分析,建立系统集成逻辑结构如图3所示。

图3 系统逻辑结构
(1)客体感知层属于外部信号采集环节,主要包括高精度基准站、位移监测站等。高精度基准站还可为蒙育瓦铜矿的大地测量、车辆定位、无人机遥感等提供高精度基准数据。
(2)数据传输层负责系统内信息传递,包括将基准站误差修正数据发送给监测站接收机,将基准站和监测站数据发送给解算软件,向最终用户传输监测和预警数据等。卫星通信误差不会造成测距误差,但数据传输层延时过大会导致位移监测站不能及时获得基准站误差修正数据,影响测距效果。短暂过大网络延时或丢包会造成伪距差分定位短时误差增大并出现误报,对载波相位差分定位后处理结果影响不大。蒙育瓦铜矿工业互联网中有线网络延时5 ms以内、无线网络延时180 ms左右,可满足监测要求。
(3)应用处理层接收客体感知层数据,保存实时卫星星历和监测结果,进行载波相位差分后处理,根据实时监测和后处理结果触发预警信息,生成历史记录。应用处理层部署于蒙育瓦铜矿私有云平台[11],保证系统连续、稳定、安全运行。其中,综合应用软件实时读取解算软件结果,支持根据位移速度、加速度和计量值的预警。蒙育瓦铜矿采场位移监测预警分为三级,例如:采场边坡计量值三级预警阀值分别为20、40、60 mm,位移速度三级预警阀值分别为1、2、3 mm/d,预警方式包括软件界面预警和即时通信预警。
4 结论
(1)基于北斗高精度空间信息技术,提出一种由高精度基准站、位移监测站和相关软件为主构成的海外露天矿山北斗高精度位移安全监测系统。
(2)该系统原理明确、结构清晰,可消除或减小用户接收机定位误差,适用于海外露天矿山大范围、多点位、分散式、高精度定位场景,满足实时在线连续监测预警要求,具有较强的实用价值。
(3)结合蒙育瓦铜矿介绍应用经验,证明北斗系统海外应用的优越性,对海外露天矿山构建高精度位移安全监测预警系统具有重要的参考意义。