变电站高压电气设备局部放电检测技术分析
2021-09-15张亚龙
张亚龙
(陕西国华锦界能源有限责任公司,陕西 西安 719319)
高压电气设备受到运行环境的综合影响,容易出现过度爬电及意外放电的隐性故障,该故障除了可能造成电网内瞬间杂波外,短期内对设备及电网运行不会产生直接影响。但高压电气设备局部放电是其出现微小故障的典型标志[1]。在安全工程学的检修窗口理论中,设备发生故障到发生相应事故之间的时间窗口,是状态检修的理想切入点,如果可以早期发现变电站高压电气设备的局部放电现象,对实现高压电气设备的状态检修有积极意义。
电气设备微小电弧放电的过程,几乎不会对电能质量产生跨波形周期的影响,即传统物联网监测模式下,针对电能质量(含电流录波图和电压录波图等)、设备温度(含单纯红外测温和温敏电阻测温等)等的监测模式,均无法对设备中的微小电弧做出有效监测[2]。因此,在技术领域亟待一种新型监测方法,能够对微小电弧进行有效监测。
从高压电气设备局部放电的电气表现来看,发生的局部微小电弧放电应被监测系统有效捕捉[3]。其中,紫外辐射、电弧噪声、电弧闪光、瞬时温度变化,是监测设备捕捉该放电现象的切入点。通过紫外探头、红外探头、可见光探头、噪声探头进行综合数据捕捉后,交由电力大数据系统及与其配合的人工智能系统进行嵌入监测,并在网络数据中心(internet data center,IDC)硬件设施支持下实现相应功能,是该方案的技术实现模式。而在监测过程中,对放电位置的精确定位,是该方案在高压电气设备局部放电监测架构中的重要技术革新点。
1 高压电气设备局部放电的三点定位法
1.1 基于倾斜摄影的三点定位法
倾斜摄影法最早用于超低空遥感测量领域,在地质勘探和工程测量中应用较为广泛[4]。在电网智能巡线等早期使用倾斜摄影的方法中,使用无人机挂载倾斜摄影设备对输电线路等电网设施进行离线测量并进行数据分析,可以实现较为精确的定位测量及占位测量。而采用固定式倾斜摄影探头的方式,可以给出更加精确的探头坐标,实现精确到毫米级的最终测量结果[5]。鉴于微小电弧的电弧长度一般小于1 cm且其在可见光、红外光、紫外光频段均有物理表现,因此使用倾斜摄影在广域波谱上对微小电弧进行定位,是本方法的重要创新点。
多轴平行摄影技术,可以提供远超可见光波谱的平行轴摄影技术支持。通过将可见光、红外光、紫外光等CMOS感光元件使用平行轴镜头的方式进行模块整合,可以提供一个拥有三摄像头平行轴整合的监测模块,该模块已经在包括电力监测系统在内的诸多监测系统中得到有效应用[6]。其中,可见光摄影可以捕捉到电弧放电的可见光辐射部分,红外线摄影可以捕捉到电弧放电时的局部瞬时温度改变,紫外线摄影可以捕捉到电弧放电时的紫外辐射部分。
对于摆杆式高压断路器来说,其外部空间较为宽阔,可以在距离其10~15 m的位置布置不同方向的3个多轴平行摄影系统,每个多轴平行摄影系统包括3个摄像头并配置高精度云台、时钟同步系统、光学镜头、惯性探头等子系统,实现光学频谱上的图像数据采集功能,利用三点定位法可以解算出电弧形态和电弧位置:
(1)
式中:L1,L2,L3为通过光学原理获得的电弧发生位置与3个摄像头之间的距离;(x0,y0,z0)为被定位点的三轴坐标;(x1,y1,z1),(x2,y2,z2),(x3,y3,z3)为3个探头的三轴坐标。因为3个探头的三轴坐标可以明确获得,所以只要获得(x0,y0,z0),即可解算出3个距离量L1,L2,L3,从而实现对电弧发生位置的明确定位。
1.2 基于声呐定位原理的三点定位法
早期部署噪声探头的目的是采集设备中的噪声信息以还原设备的微震动特征曲线。较长时间以来,这种噪声探头的应用从未改变。在多探头同步测量的过程中,利用声速远低于光速的特征,基于声呐定位学原理,分析其高频噪声波峰的出现时间差,提供精度远大于光谱定位的三维定位[7],是本方法的第二个重要创新点。

(2)
式中:h为当前气压、风速、湿度条件下的声速;t1,t2,t3为声音抵达3个探头所经历的时间。同样以摆杆式高压断路器为例,其自身尺寸一般小于5 m,各声音探头间距一般小于15 m,虽然声速可能受到气压、风速、湿度等条件影响,但在此尺度内3个探头所受到的影响差异性可以忽略不计。
因为标准大气压静态空气中的声速一般为340 m/s,声音探头的采样频率一般达到44 MHz,系统可以达到极高的理论定位精度。但考虑到声音反射、散射等影响,实际分析中,采用2 kHz频率进行分析,其定位精度可以达到0.17 m。
2 高压电气设备局部放电的物联网系统设计
2.1 摄影探头的设计与布局
多轴平行摄影探头的基本原理是将3个不同波段的摄影探头采用光轴平行的方式进行整合,形成一个总成式模块。因为该技术在当前制造工艺下已经实现了微型化,所以在工业探头领域的总成构成技术已经相对成熟,市面上也已经出现了多个国产探头品牌可供选择[8]。其基本构成模式如图1所示。
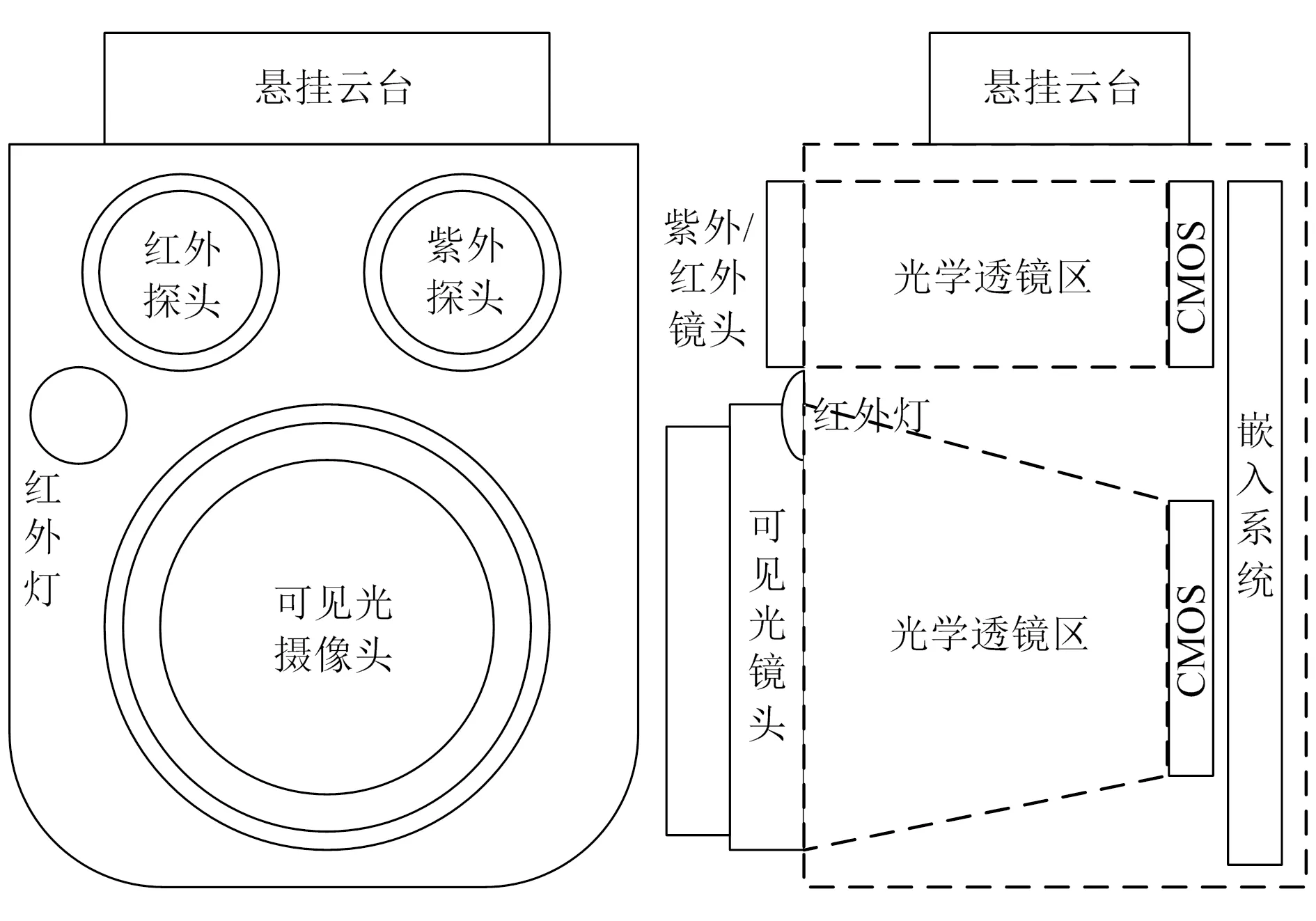
图1 多轴平行摄影探头布局示意图
图1中,可见光探头采用了较高解析度的摄影探头,一般采用2K(1 920像素×1 080像素)以上画质、60帧/s以上的帧率采集图像信息,而红外探头和紫外探头的解析度要求并不高,一方面其获得的数据与可见光探头进行数据整合时,仅是将红外信号与紫外信号与可见光信号进行叠加,另一方面其画面数据量并不大,特别是紫外探头部分,因为视场内可能发出紫外辐射的等离子体物质并不多见,其实际拍摄内容可能仅为图像中的电弧部分。因此,红外探头和紫外探头一般采用640 像素×480像素的解析度进行60帧/s的同步摄影。
嵌入系统的主要计算职能包含2个部分:
1)将3个摄像头数据进行叠加处理,即将红外探头数据和紫外探头数据叠加到可见光数据中。同时对系统内的关键点进行判读并利用公式(1)给出关键点的实时定位监测结果。
2)当可见光探头发现异常闪光、红外探头发现异常瞬时高温、紫外探头发现异常紫外辐射点这3个异常现象出现1项或多项时,标定时间戳并将实时单帧数据进行单独存储,并报送到IDC中进行远程离线处理。
2.2 探头的物联网拓扑结构
前文分析中,采用3个多轴平行摄影探头和3个噪声探头进行数据采集,采集数据在探头嵌入系统进行初步处理后,报送到嵌入式集中板中进行数据缓存,集中板外挂一个不少于5 TB的SSD工业存储阵列系统,同时由集中板通过工业网桥主机向IDC报送相关数据[9],如图2所示。

图2 探头物联网拓扑结构示意图
图2中,探头物联网系统向IDC报送信息的工作数据流主要包括以下内容:
1)对摄像头、噪声探头的流媒体数据进行存储并与IDC数据仓库的流媒体服务器进行同步。
2)对疑似放电发生时间的重点流媒体信息时间戳进行存储并与IDC数据仓库的逻辑数据仓库服务器进行同步。
2.3 监测系统的IDC架构设计
图2中的IDC部分,基本满足当前电力IDC的CBA架构。所谓CBA,是指在一个工业生产环境机房中,同时布局云计算(C.C.)、大数据(B.D.)、人工智能(A.I.)等相关硬件,以实现对智能电网提供相应服务的大数据功能。但不同智能电网相关系统对IDC的要求有所不同,其CBA架构的侧重点也有所不同,该系统的IDC架构如图3所示。

图3 监测系统的IDC端拓扑示意图
图3中,其CBA架构符合以下特征:
1)数据库部分侧重流媒体数据的仓储及检索功能。本文采用多个流媒体服务器,在对应任务服务器的统一协调下实现服务器集群功能。任务服务器功能为协调存储服务器的可用存储空间,使用服务器虚拟化技术将多台存储服务器在逻辑上形成单台大容量服务器。逻辑数据主机负责存储疑似放电时间戳的相关信息。
2)使用包含多个GPU计算核心的浮点计算主机,实现C.C.和A.I.功能。该系统对此两项功能的要求并不高,其中C.C.部分除Python数据分析功能和BIM数据整合功能外,无额外要求;而A.I.功能则采用单一神经网络模块实现数据的二值化判断。
3)使用本地负载均衡器与提供流媒体服务的任务服务器联合对系统内的任务分发和负载均衡实现统一管理,使用API服务器搭建与平行系统和上级系统的数据逻辑通道管理,使用LAMP服务器实现桌面端和移动端的数据展示,使用工业网桥主机实现与图2中物联网系统的连接。
3 人工智能的实现模式
人工智能对流媒体的判断属于当前的技术短板,但在时间戳数据的支持下,可以对时间戳对应的流媒体单帧数据进行分析,属于较为成熟的机器学习技术,即通过对9组视频单帧数据、3组噪声线性数据进行基于神经网络的归一化处理,进而在单一神经网络模块下实现数据的二值化,可以得到相应的分析结果[10]。
对于图像数据来说,系统内包含3个可见光数据(为1 920像素×1 080 像素的2 073.6pt个像素点数据)和6个紫外、红外成像数据(为640像素×480 像素的307.2pt个像素点数据),分别构建逐像素点扫描输入的降维神经网络。该系统将二维数据压缩至零维,即该系统输出1个Double格式数据,中间层为7层,每层压缩比不超过0.30,所有节点均按照多项式函数法进行设计,节点函数如公式(3)所示:
(3)
式中:Y为节点输出数据;j为多项式阶数;Aj为第j阶多项式的待回归变量;Xi为第i个输入数据。
对声音数据来说,同样使用降维神经网络将数据从一维降维到零维,形成1个Double格式变量。故所有输入数据最终形成一组由6个Double格式变量组成的数据簇。核心神经网络通过对这些数据进行二值化获得相应判读结果。详见表1。

表1 神经网络核心模块的隐藏层设计表
表1中,神经网络核心模块共分为6层3组:第1组由第1层和第2层构成,负责将数据细节充分放大,采用对数函数进行节点设计;第2组由第3层和第4层构成,负责进一步归一化数据,使数据特征和隐藏关系得到充分整理,采用多项式函数进行节点设计;第3组由第5层和第6层构成,负责将数据进行充分二值化,使数据偏向更接近认同放电现象的接近1.000值的判读值和不认同放电现象的接近0.000值的判读值。表1两个公式中的A和B为待回归变量。
4 数据仿真与系统功能验证
因为在系统实际运行过程中,尚没有一种可以完美监测微电弧发生过程的监测机制,所以需要在模拟环境中搭建实验环境,并在实验环境中明确微电弧的发生与否。本文使用SimuLink电力电气仿真软件进行仿真测试,可以较完美模拟电力系统或者电力设备的各种状态,可以精确构建微电弧模型的实验环境。验证试验中,使用SimuLink软件内置的故障触发功能触发1 100次异常电弧放电。
因为该算法的本质是通过微电弧现象表现出的可见光、红外光、紫外光等电磁辐射和高频噪声的机械能辐射判断系统中是否发生微电弧,所以系统的判断准确率是对该系统性能进行判断的重要分析项目。所谓真阳性概念是被系统判断为微电弧的微电弧现象,假阳性是指被系统判断为微电弧的非微电弧现象;所谓真阴性是被系统判断为非微电弧现象的非微电弧现象,而假阴性是被系统判断为非微电弧现象的微电弧现象。系统敏感性是指被系统判断为微电弧现象的所有结果中,真实发生微电弧现象的比例。系统特异性是指被系统判断为非微电弧现象的所有结果中,未发生微电弧现象的比例。
根据该测试结果得到表2。

表2 Simulink系统的敏感性及特异性分析
由表2可知,该系统实测过程中,敏感性为98.98%,特异性为88.09%。即可认为其对单次放电现象的识别率达到了98.98%,且大部分高压设备在出现绝缘故障时,会频繁出现微小放电现象,当单一设备放电次数达到10次时,其异常放电漏识别率可以达到1.22×10-20,其漏识别率接近于0。
综合分析放电规模效应驱动下的放电识别率,可以得到表3。
表3中,当放电规模达到1×104pF级别时,放电电弧在白天勉强肉眼可见,此时系统的识别敏感性达到91.54%、特异性达到84.39%,此数据已经具备了工程意义。当放电规模达到1×108pF时,如果频繁发生放电现象,可能已经损伤电气设备,即其瞬时电弧可能给设备绝缘带来不可逆损伤,此时的识别敏感性已经达到100%,且特异性达到了97.84%,可以认为该系统已经表现出较强的稳定性。
5 结束语
本文通过同时采集用于三维建模的可见光视频、用于温度测量的红外视频及用于电弧状态测量的紫外视频形成广谱加强视频,同时采集了设备噪声等数据,最终实现的甚高频声光信号机器学习识别判断技术,可以在高压设备发生微小规模异常放电过程中,早期发现高压设备的隐性故障,从而对设备状态检修提供数据支持,且该技术支持的测量系统在部署过程中,除对IDC内流媒体服务器要求较高外,对物联网硬件及IDC其他硬件的要求均不高。该技术可以在较小的工程量基础上,实现对高压设备微小隐性故障的早期发现和早期处理,可以有效提升变电站的状态检修水平。
