船舶与岸电并网控制策略分析*
2021-09-15成高键苏
张 成高 键苏 贞
(1.江苏科技大学电子信息学院 镇江 212003)(2.江苏科技大学海洋装备研究院 镇江 212003)
1 引言
岸电技术是利用陆上电源代替船舶电站为靠港停泊的船舶提供所有的工作和生活用电的技术,从而控制对港口的生态环境的污染和降低噪声污染。随着港口排放要求日趋严格,为了减少废气排放及降低环境污染等,岸电技术迎来了快速发展。从资源节约和经济角度考虑,船舶岸电系统是最好的选择。船舶技术的关键之一是并网技术,在国内大部分民用船舶未使用岸电或者没有进行设备改进,这不符合国家对港口发展的要求和生态保护,因为岸电并网稳定性差,在并网的过程中可能存在极大的冲击电流、电压振荡和频率不稳定的问题,可能导致船岸正常运行的设备的损坏以及并网失败,造成严重的损失。
在目前的岸电系统的研究现状中,文献[1~3]提出了岸电系统研究和应用中存在的实际问题,为未来的研究说明了主要的方向;文献[4~6]提出了岸电系统岸上电源如何实现无缝并网的方法,分别从设备选择、电源构成方式、电源类型作出了说明。在上述的文献中,主要的是对岸电技术中存在的问题和方案选择提出的设想,没有通过理论和实际应用进行验证。文献[7~8]提出了分别在下垂控制中加入一阶惯性环节和虚拟惯性环节,通过此方法解决功率在并网时刻的稳定性的问题,但是由于稳态静差的存在,无法在保证并网及发电机组退出后电能质量电压和频率的稳定。文献[9]提出一种岸电功率优化方法,其结合岸电综合管理系统,采用预同步和分阶段控制解决并网时冲击功率的问题。文献[10~14]提出滑模变结构控制在光伏等并网中的应用,分析研究了并网中功率以及功率因数低的问题。在上述文献中,研究对象主要是并网功率从功率因数、大冲击功率等研究并网中功率问题,没有研究并网过程中电能质量电压和频率的问题,同时造成并网失败的原因还有大冲击电流的问题。
为了研究如何控制岸电并网中的电压和频率的稳定性,以及如何避免产生大冲击电流,换言之也是冲击功率。在上述研究基础上从电能质量角度出发,本文提出一种基于RBF自适应控制及改进滑模控制的控制方法,通过此方法检测优化船侧和岸侧的电压、频率,提高并网过程中电压、频率的稳定性,避免极大冲击电流的产生,保证船舶与岸电并网的可靠性。
2 船舶岸电系统并网逆变器建模
船舶岸电系统由岸基供电系统、船岸连接系统以及船载受电系统等组成,其结构简图如图1所示。其中,岸基供电系统主要是岸基变频电源,结构包括整流和逆变等;船岸连接系统分不同电压等级、
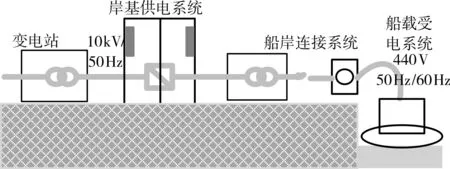
图1 岸电系统结构简图
不同船舶类型上船方式不同,大型远洋货轮采用高压上船、其他散货船主要以低压上船为主;船载受电系统主要是实现与岸电的并网,采用不断电并网的方式连接,如何控制岸基电源与船舶并网运行是岸电系统研究核心技术之一。
2.1 岸电并网控制的基本结构
岸基电源结构包括整流、逆变、滤波等结构,其中逆变器是控制的核心部分,控制逆变器调整其输出电压、频率、相位的同步。通过对逆变器输出电压、电流、电容电压以及船侧电压和电流的检测,经过旋转变换,通过算法对旋转分量控制得到驱动信号控制逆变器的输出。船舶岸电系统岸基电源拓扑结构及并网控制策略结构简图如图2所示。

图2 船舶岸电系统岸基电源拓扑结构及并网控制策略结构简图
在图2中结构主要分为三个部分。首先,整流装置将大电网三相交流电整流变成直流电压;其次,经过逆变装置得到期望的三相电压;最后,通过变压器输出期望电压实现并网。将岸电变压为6kV高压,经过整流之后,通过逆变器得到440V/60Hz期望的低压。但是逆变过程中存在误差,以及系统本身的耦合和谐波的干扰,实际结果可能无法满足要求。另外,目前岸电使用情况一般采用高压上船或者低压上船的模式,变压装置安装在船上,通过船舶控制系统控制并网。在LCL滤波结构中,电容采用较为常用的星型接法,对逆变器输出电压、电流、电容电压作为变量利用基尔霍夫定律构成系统的数学模型。
2.2 并网逆变器的建模
如图2所示具有LCL滤波结构的岸电并网逆变器结构简图中,假设模型中元件都是理想型器件。其中,ua、ub、uc为逆变器输出的三相电电压,ia、ib、ic为逆变器输出的三相电电流,uCa、uCb、uCc为电容的电压,iga、igb、igc为流过电感L2的电流,uga、ugb、ugc为船侧电压。
根据图2中并网逆变器的拓扑结构,依据基尔霍夫定理推导出三相静坐标中并网逆变器模型的状态方程如下。

式(1)经过Park变换可以得到在旋转坐标下的状态方程。
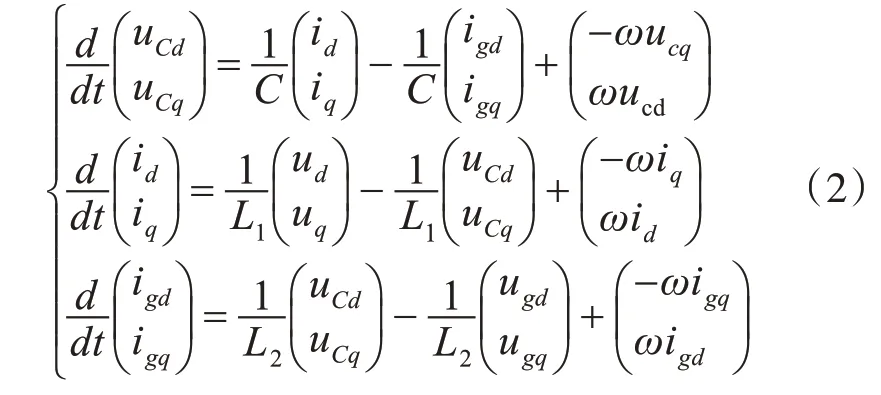
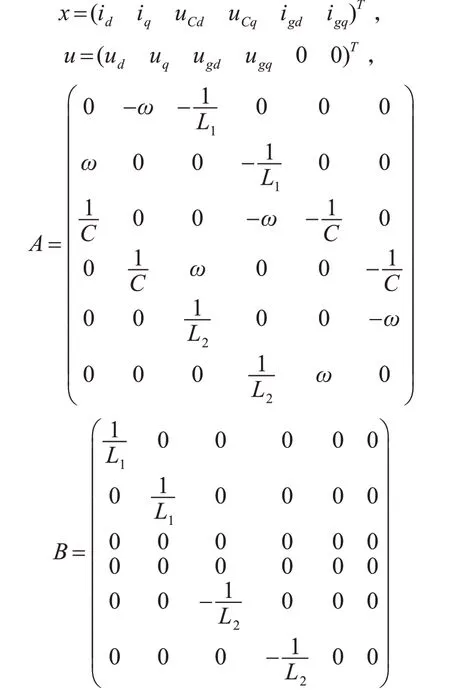
式中,ud和uq、id和iq、uCd和uCq、igd和igq,分别为ug、ub、uc和ia、ib、ic和uCa、uCb、uCc和iga、igb、igc经Park变换后在d轴和q轴上的分量。其中,L1和L2、C分别为结构中的电感和电容,ω为期望输出的三相电压的角频率ω=2πf。通过整理可以将式(2)的状态方程写为

其中,x、u为变量,A、B为状态方程的系数矩阵,
逆变器输出的结果经过LCL滤波之后输出的结果,通过模型结构推导得出的结果如式(4)所示。根据理论推导系统的输出方程,依据系统选取的控制对象,通过反向表示需要得到的期望结果作为控制器的输出结果,通过式(2)推导得出公共连接点船侧电压和逆变器输出电压关系如式(4):


3 滑模控制器设计
通过对系统逆变器和船侧的电压及电流的控制得到逆变器经过LCL滤波最终输出的结果为ugd、ugq,以此结果为检测和控制的目标,通过对电压误差跟踪实现并网逆变器闭环控制,提高系统的稳定性和可靠性,控制目标误差e:

其中,e为共连接点处并网电压误差;ug是逆变器输出的实际并网电压;ug
*是船侧的电压。
3.1 RBF结构及理论
本文采用的是RBF神经网络自适应滑模控制,控制系统简要过程如图3所示。利用RBF网络的万能逼近特性,逼近滑模控制误差f(x),进行误差反馈及补偿,为达到系统的稳定。其中,自适应律和滑模h趋近律共同保证系统的稳定。网络算法为
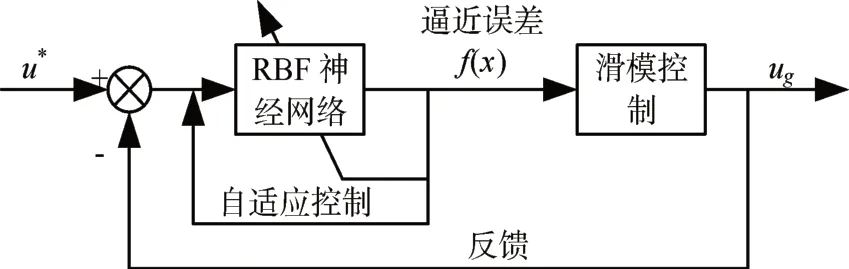
图3 神经网络控制结构简图

其中,h为网络的高斯基函数输出,W*为网络的理想权值,ɛ为网络的逼近误差,ɛ≤ɛN。
网络输入取x=[e e']T,则网络输出为

根据式(6)、(7)可得,
3.2 滑模面及趋近律的设计
改进传统滑模面切换函数s=ce+e′,选取PI形式滑模面切换函数:

其中:k1、k2分别为滑模面切换函数的比列系数和积分系数。
对函数s求导,得

根据滑模控制理论,当系统工作在滑面时,s′=0。结合式(4),得

其中,slaw表示趋近律,通过改进等速趋近律,采用分数阶滑模趋近律[15],本质未变,通过逼近的方法增加了可调系数。

其中,0<α<1,ζ>0。
变换得

证明:
则设计控制律为

根据式(15)和式(8),可得
根据式(17),当D1-αζ>|ɛN|时,则V'<0。可见控制律中的趋近律具有克服神经网络逼近误差的作用,以保证系统能够达到稳定的状态。根据李亚普若夫稳定性判据,可以判断控制系统在平衡点处是渐近稳定的,系统可以在有限的时间内到达滑模面,并能够在滑模面上运动。
4 仿真分析
为验证本文采用的基于RBF自适应改进滑模控制策略的有效性,通过Matlab/Simulink仿真平台设计440V/50Hz和440V/60Hz的低压岸电与船舶并网的模型,参考船侧期望的电压和频率控制逆变器输出的电压和频率,实现逆变器对电压和频率的控制。通过对逆变器的输出电压和电流以及船侧电流作为控制状态量,判断和确定逆变器需要输出的电压及频率的变化量。与常用的PID进行对比,仿真时长设置为5s,在3s时刻并离网切换,部分图形取仿真2.95s~3.05s的仿真图。系统仿真的主要参数如表1所示。

表1 仿真模型主要参数
根据表1进行仿真参数设置,其中LCL参数设计应该满足滤波参数的原则10f<fres<f开关/2。
4.1 并网电压仿真分析
PID控制、RBF自适应滑模控制下逆变器输出电压波形如图4所示。从图4(a)中,可直观地观测到三相都有很大的相位差,并网时强制同相;在图4(b)中,并网时只有两相有微小的错位,因为在RBF自适应滑模控制算法应用中,存在相位预同步的过程,波形图如5所示。在图5中可以看到在并网时,相位存在相位差,由频率的波动而引起的频率差,将导致相位差的存在。从而导致并网时电压存在微小的畸变错位,电压幅值没有跃变,符合并网要求,也符合实际工况要求。
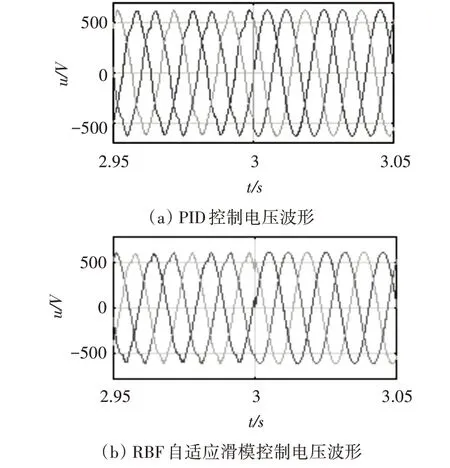
图4 逆变器经过LCL滤波输出电压波形
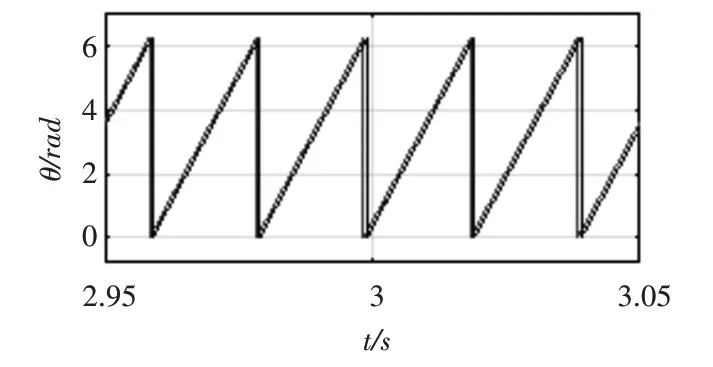
图5 并网相位波形
通过对比,RBF自适应滑模控制可以更好地控制并网电压,相序也是并网中重要的因素,通过相位预同步的过程无需强制同相,提高并网电压的可靠性,一定程度可保证加在负载上的电流的稳定,降低并网过程设备损坏率。通过并网电压和相位波形可知,相位误差使并网没有达到理想状态的同期并网,并网存在误差。
4.2 并网频率仿真分析
频率对比响应图如图6所示,从图6(a)和(b)中,可见在RBF自适应滑模控制下,初始时刻频率超调更快;在并网未构成闭环之前,系统频率波动更小;同时,并网时刻频率突变变小、恢复稳定响应时间更快。其中数据的变化情况如表2所示。
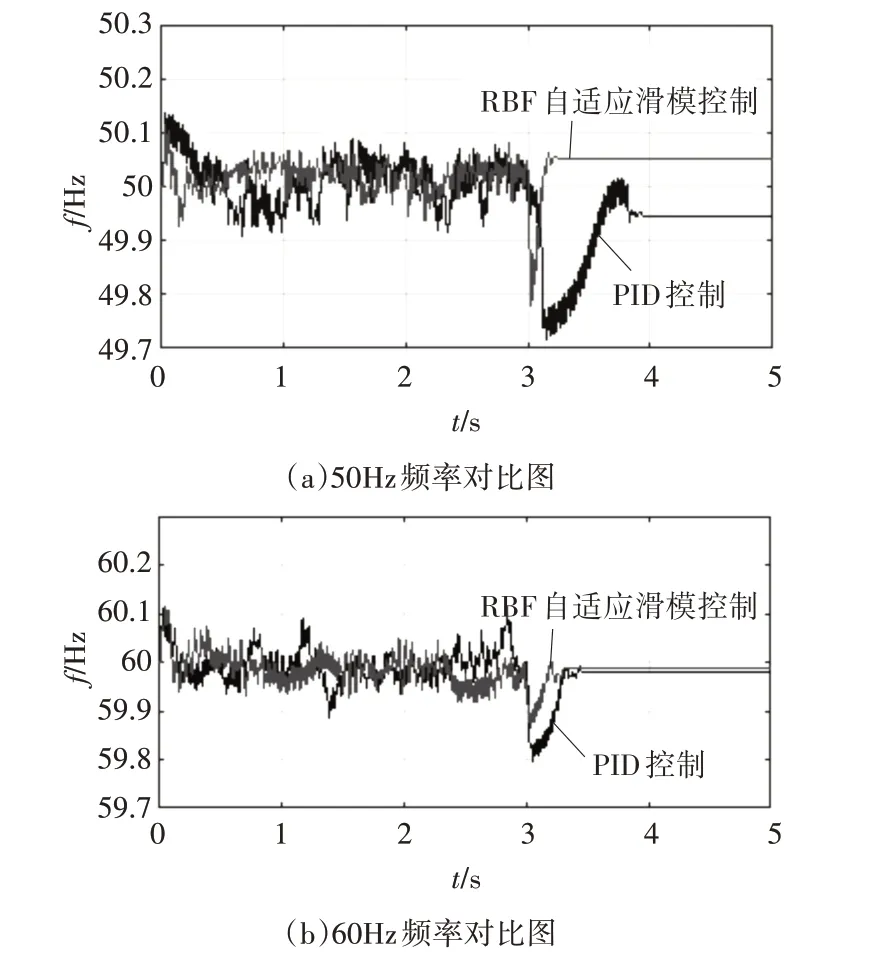
图6 频率响应对比波形图
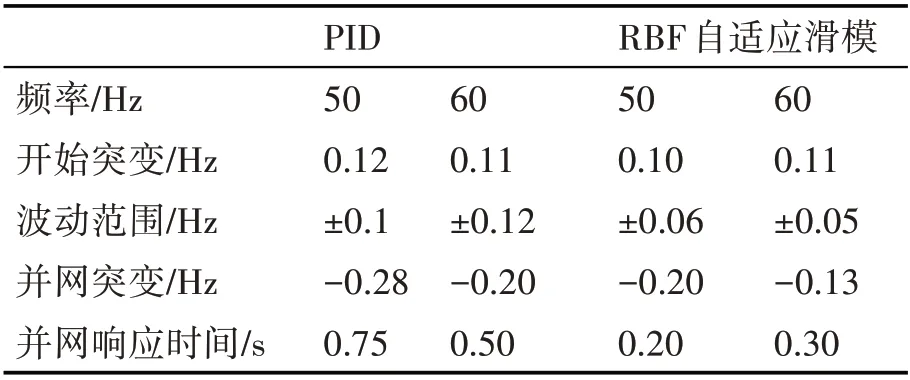
表2 两种控制方式各阶段频率情况
由表2数据分析对比RBF自适应滑模控制和PID控制可知,第一,缩小了频率正常波动范围,在60Hz频率下比50Hz时缩小的更大;第二,并网时刻,50Hz、60Hz频率突变更小都缩小了0.7Hz左右,分别相当于缩小了1.4%和1.2%的误差;第三,并网时刻50Hz、60Hz频率响应时间分别提高了0.5s和0.2s。说明RBF自适应滑模控制具有更好的鲁棒性和可靠性。
通过此方法提高了并网频率稳定性,在恒频控制下功率的控制、稳定具有一定参考作用;频率稳定同时可以侧面反映功率的稳定,提高并网的可靠性。对于并网之前的频率波动能否更小甚至消除达到理想状态以及存在的原因需要进一步探索,同时在理想状态下频率波动是上述相位差存在的主要原因。
4.3 负载功率仿真分析
并网前后输出功率变化如图7所示,由图7可见并网前频率也存在波动,相对比较稳定;并网时PID控制功率变化相比于RBF自适应滑模控制变化量更大,后者并网时频率变化较为平缓逐渐趋于稳定,而前者存在超调的过程。通过RBF自适应控制加在负载上功率波动变化△P最大不超过100W,误差不超过0.01%。另外,并网合闸时加在负载侧没有产生大冲击功率,具有更高的并网可靠性。
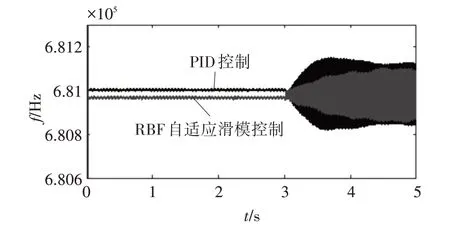
图7 负载功率变化图
根据功率变化分析可知,对并网电能质量电压和频率的控制,可以有效地控制并网的功率,抑制大冲击电流以及保证负载过滤平滑过渡。但是,并网中设定额定变频电源输出功率,有直接跃升的状态,会产生较大的功率波动,已有学者通过逐级增加功率解决此问题。另外,将进一步验证是否可以通过功率补偿机制实现功率平滑转换。
5 结语
通过港口调研,岸电可以达到并网要求,并且具有很高的成功率,但多数采用间断供电并网。使用不间断供电并网可能会不稳定,造成船舶与岸电并网失败,损坏船岸并网设备。结合目前对并网功率波动的研究,提出对船舶岸电并网电能质量电压和频率的控制策略,研究并网的基本条件以及并网中电压、频率、功率、相位之间的关系,如何相互影响。对未来岸电并网研究具有一定的现实意义和参考价值。
依据本文研究内容,有以下发现及结论。
1)船舶与岸电并网时,电压同序时产生的电压畸变是由并网相位差造成的;
2)误差范围内频率稳定在50Hz/60Hz,但频率波动一直存在,这会导致相位产生误差,也会造成功率产生波动;
3)本文所采用方法中,基本实现了并网电压的无缝对接,因为算法中存在相位预同步的过程,解决了PID控制电压强制同相的问题;同时,电压、频率及功率波动都符合实际工况运行的要求。
