准被动式储能下肢外骨骼的设计
2021-09-14马建峰王嘉明
马建峰, 王嘉明, 陈 晓
(1.北京工业大学机械工程与应用电子技术学院, 北京 100124;2.军事科学院系统工程研究院军需工程技术研究所, 北京 100082)
随着科学技术的飞速发展,战争形态已经从机械化迈向信息化. 战场形态越来越趋近小型化、特种化,所以单兵作战能力就显得越来越重要,但由于地形、负重等因素的限制,人体机能的极限已经无法适应瞬息万变的战场情况. 因此,提高士兵身体机能的外骨骼装备就成为解决这个问题的最好方案. 在进入21世纪之后,外骨骼助力机器人作为一种人体的辅助设备,在军用领域得到了空前的发展[1]. 随着外骨骼在军事应用领域中的前景被发现,在欧美与日本等地区和国家,许多科研机构及大学率先针对基于外骨骼行走助力技术给予了高度的重视,并且取得了一些令人瞩目的成果.
由伯克利大学开发的BLEEX[2-4]负重行走助力外骨骼,通过液压驱动达到运动辅助的功能;由洛克希德·马丁公司对BLEEX外骨骼进行改进并研制出的HULC外骨骼能够使士兵完成一系列动作,又可减少士兵因提举较重战斗载荷而引发的肌肉骨骼损伤;由麻省理工学院研制的一款MIT外骨骼[5],通过将主动驱动与被动驱动配合使用,实现人体助力的效果;由哈佛大学研制的一种Soft Exosuit的柔性外骨骼[6],通过电机驱动鲍登线不仅能够使下肢摆脱刚性外骨骼的硬性约束,而且更加轻便;由Sarcos公司研发的XOS助力系统[7],通过液压驱动将力传递给外部机械机构. 这些助力外骨骼按照人体的下肢进行仿生设计,在满足下肢正常运动的前提下实现助力功能.
这些主动式外骨骼一般通过电力驱动或液压驱动. 以蓄电池作为动力源,工程实现简单、易控制,但续航时间短、输出功率低;采用液压驱动的动力模块,可提供较大的功率和相对较长的持续工作时间,但噪声、振动大,控制复杂[8]. 因此,本文提出了一种准被动式储能下肢外骨骼. 其不以运动跟踪为主要目标,而是将动作类型识别和控制储能机构工作为主要目标. 利用弹性元件实现能量存储,通过控制系统保证储能元件可以正确地吸收能量,合理地分配能量的激发位置和时机.
1 准被动式下肢外骨骼设计
通过对人类行走步态规律进行研究可知,膝关节在支撑期将人体质量传递到地面,并且在摆动期使下肢自由摆动[9];而髋关节则在支撑期相对于人体向后移动,在摆动期相对于人体向前摆出,如图1所示. 因此,采用这种准被动式自适应储能外骨骼需要根据人体姿态准确地实现弹性储能结构开始工作和停止工作的时间段,使外骨骼跟随人类步态.

图1 人体行走步态Fig.1 Human walking gait
人体实现完整行走过程需要多个关节相互合作才能完成,因此在研究过程中不可以简单地割裂开来分别研究,但是每个关节有其各自的运动轨迹与范围,同时各个关节的工作均有各自的侧重点. 针对关节特点设计下肢外骨骼如图2所示,主要分为髋、膝关节储能装置,腰部通过支架固定,同时配有小型的电源,为改变执行器的状态提供电源. 髋、膝之间通过可调节的支架实现连接,以便于适应不同身高的穿戴者.
1.1 髋关节储能装置设计目标
在一个完整的步态周期中,髋关节角度与力矩之间存在近似线性关系,而这一特性恰好与线性弹簧伸缩或扭转弹簧旋转时力- 位移特性相似[10]. 参考CGA数据库的相关数据得出相应的曲线,如图3所示,0 s~T0时,人体处于支撑期;T0~1.2 s时,人体处于摆动期. 在设计时以T0时刻为分析点,在此时刻之前实现能量的存储,在此时刻之后实现助力. 本文结合以上研究,设计出一种基于凸轮- 弹簧的自适应髋关节外骨骼,如图4所示. 根据人体步态规律,髋关节在整个运动过程中类似于钟摆,通过凸轮- 弹簧自适应系统实现髋关节做向后的伸展运动时进行能量的存储,进而将存储的能量作用在髋关节以辅助其做向前的屈曲运动.
1.2 膝关节储能装置设计目标
在一个步态周期中,膝关节在质量支撑阶段表现出较大的力矩,而研究发现在该阶段中膝关节的角度和力矩几乎为线性关系[11]. 参考CGA数据库的相关数据可得出膝关节的内力跟随时间的变化曲线,如图5所示,在0 s~T0时,人体处于支撑期;在T0~1.2 s时,人体处于摆动期. 结合人体步态,以膝关节内力为设计依据,提出一种基于扭簧的被动式的膝关节外骨骼,扭转弹簧可以部分替代膝关节在支撑阶段的作用,用以辅助膝关节在支撑期的后期做伸展以及减轻膝关节的负担. 同时,为了满足膝关节在摆动期的自由活动,需配合电磁离合器共同实现在整个步态周期中的正常行走. 基于扭簧- 离合器的膝关节储能装置可以实现外骨骼在支撑期锁定并为膝关节提供助力,在摆动期解锁便可实现膝关节的自由摆动. 如图6所示,通过该种方法,可以实现在不妨碍人体正常运动的前提下,为人体行走提供助力.
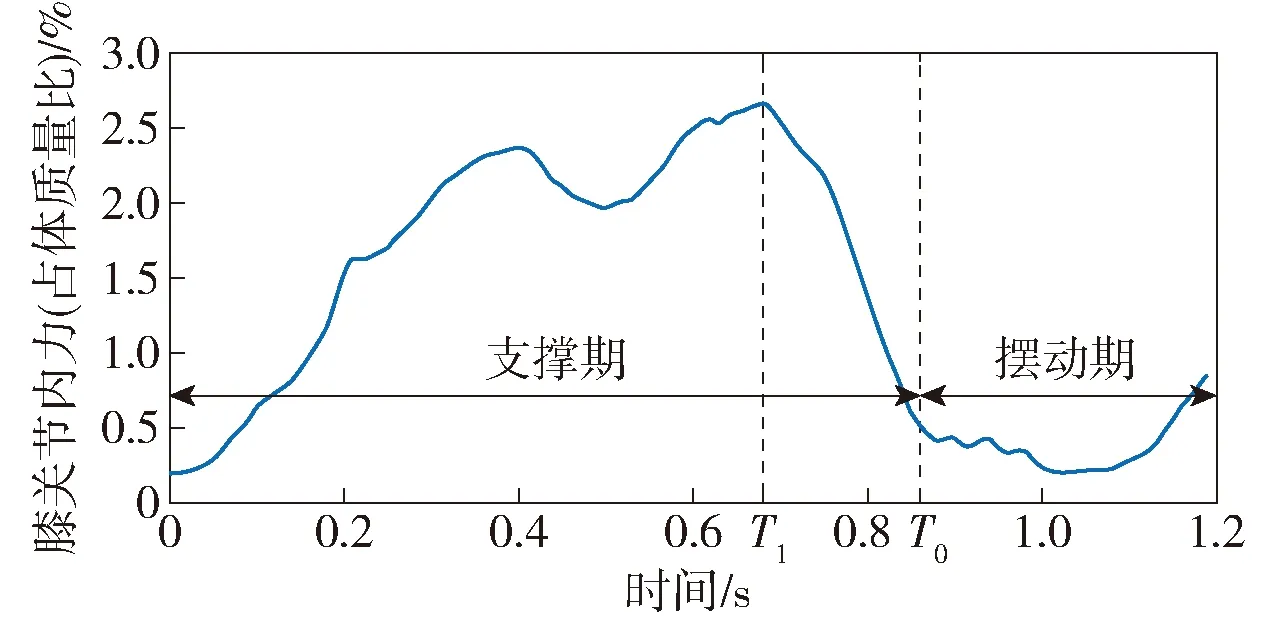
图5 膝关节内力曲线Fig.5 Knee internal force curve
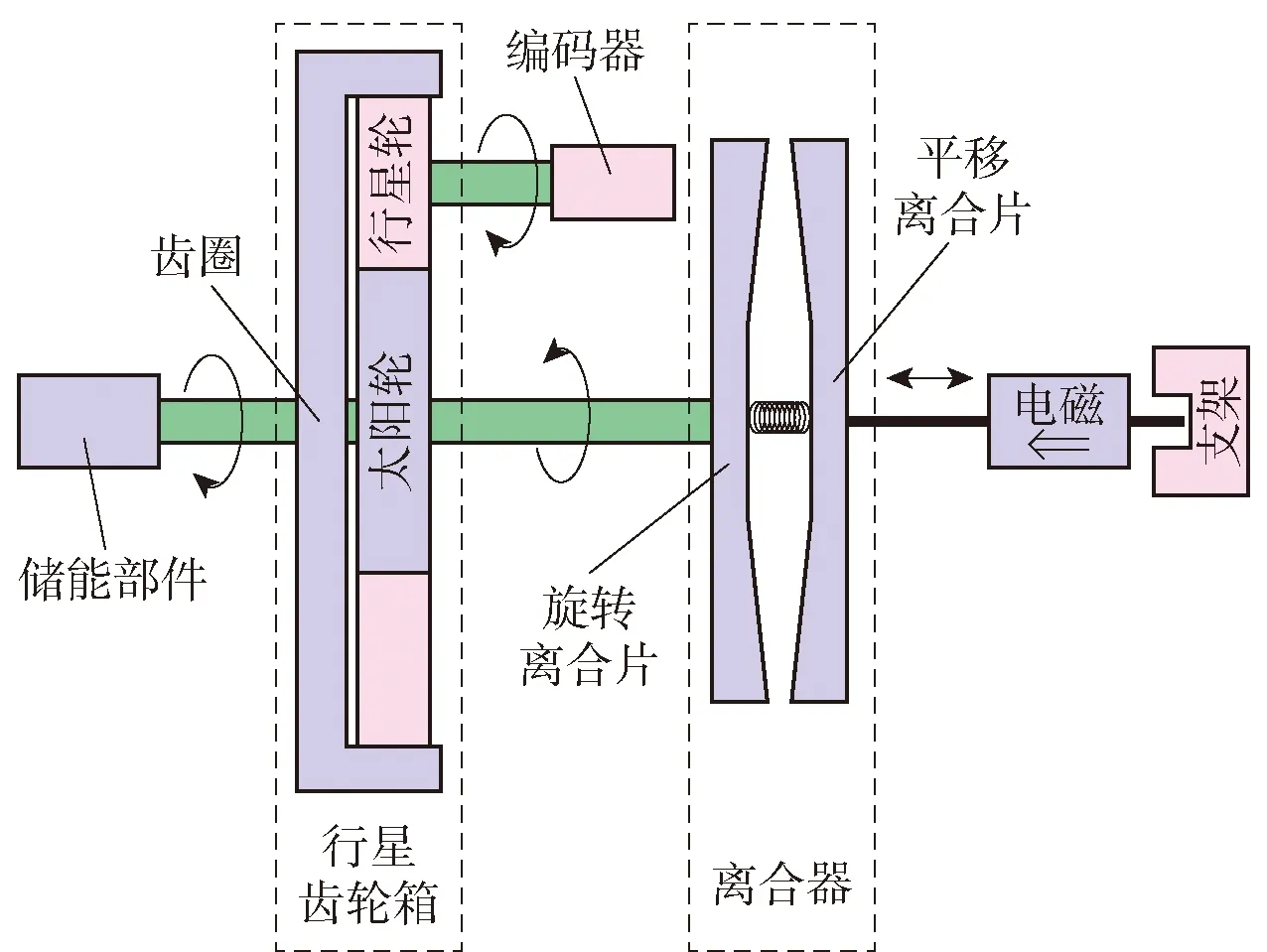
图6 基于扭簧- 离合系统的整体图Fig.6 Overall picture based on torsion spring-clutch system
1.2.1 传动机构
由于该外骨骼基于被动式行走原理,为了可以存储较多的能量来辅助人体行走,本设计在储能部件到小腿支架之间采用类似于减速器的传动机构实现能量的传递. 该传动机构一端与储能部件连接,一端与小腿支架连接. 以小腿支架一端做输入端时,通过传动机构的传递,在储能部件的一端将会达到增加转速、减小扭矩的目的. 该传动机构由4个行星齿轮、1个外齿圈、1个中空的太阳轮和1个行星架构成,其中外齿圈固定不动,当行星架转动时,将会带动行星齿轮转动,最终将转动传递至中空太阳轮的一端. 通过该传动机构的增速减扭作用,当膝关节屈曲小角度时,在储能部件一端可实现大角度的旋转位移,进而可实现设计小刚度的卷簧,使膝关节的能量存储更易实现.
1.2.2 变刚度离合系统
变刚度离合系统(见图7)由弹性储能部件、传动机构与离合系统串联构成,在整个支撑阶段中,弹性储能部件的刚度即为整个储能系统的刚度. 在摆动阶段,离合系统将断电脱离,使膝关节的屈曲运动无法通过传动机构传递至弹性储能部件一端,其结果表现为外骨骼作用失效,在该过程中,外骨骼可跟随人体自由摆动,而不涉及能量的存储与释放,此时外骨骼的储能系统达到零刚度. 从支撑阶段到摆动阶段,储能系统的刚度从有到无,即达到了变刚度的效果. 通过变刚度系统,可使外骨骼在不妨碍人体正常运动的前提下,实现最大化的助力效果.
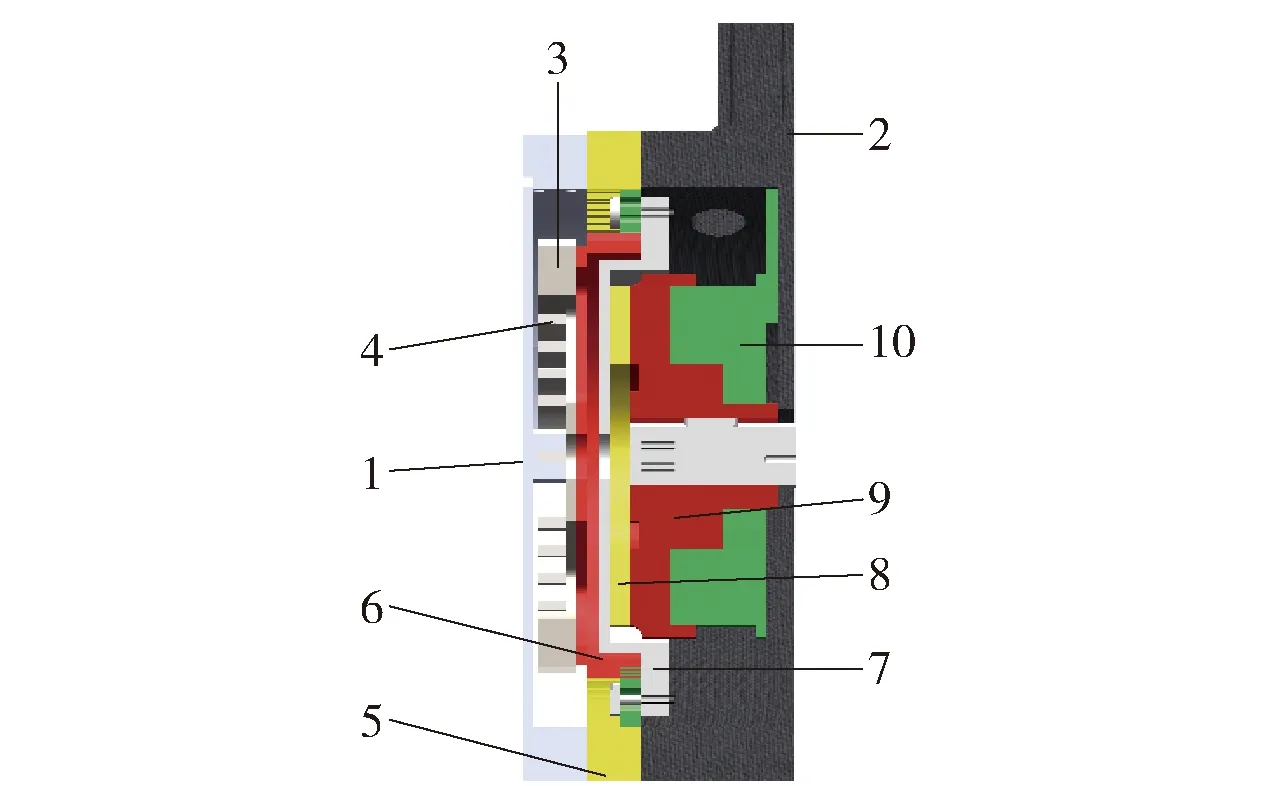
1—膝关节前盖;2—膝关节后盖;3—棘轮;4—涡卷簧;5—齿圈;6—中控太阳轮;7—行星架;8—离合器衔铁;9—离合器转子;10—离合器定子. 图7 变刚度离合系统Fig.7 Variable stiffness clutch system
1.3 控制策略
传统主动式下肢外骨骼以连续的位置、速度、力等信号作为控制输出,而该准被动式下肢外骨骼仅以髋关节的霍尔传感器和膝关节的角位移传感器为运动识别单元,电磁铁和电磁离合系统为控制单元,通过将传感器识别的运动信号传递至控制单元,根据不同的步态时期采用不同的控制执行方式,可在指定的时间内配合膝关节的能量存储与释放环节. 针对控制对象的特点,该控制策略以能量释放、能量存储和能量保持3种模式作为输出.
1) 能量存储模式:在支撑初期,脚跟初始着地,膝关节几乎完全伸展,大腿相对人体躯干向前摆动到极限位置. 此时,髋关节储能装置处的霍尔开关1跟随髋关节转动,触碰到磁钢,如图8所示,将该状态的信号传递至控制单元,分别控制电磁离合器通电吸合和电磁铁断电脱离. 在支撑中前期,足部与地面持平,膝关节渐渐屈曲至20°,大腿相对人体躯干向后摆动. 由于电磁离合器通电吸合,膝关节的转动将通过传动机构传递至弹性储能部件,进而完成能量的存储.

图8 触发能量存储模式的状态Fig.8 Trigger the state of the energy storage mode
2) 能量释放模式:在支撑中后期,足部与地面持平,膝关节几乎再次完全伸展,大腿继续相对人体躯干向后摆动. 此时,电磁离合器仍保持通电吸合的状态,弹性储能部件将会反转释放能量,以辅助膝关节做伸展运动. 在随后的支撑末期,足跟渐渐离开地面,膝关节保持伸展状态,大腿仍继续相对人体躯干向后摆动至极限位置. 此时,髋关节储能装置处的霍尔开关2跟随髋关节转动,触碰到磁钢,如图9所示,将此时的信号传递至控制单元,控制电磁离合器断电脱离,在该状态下,弹性储能部件中的能量将完全释放.
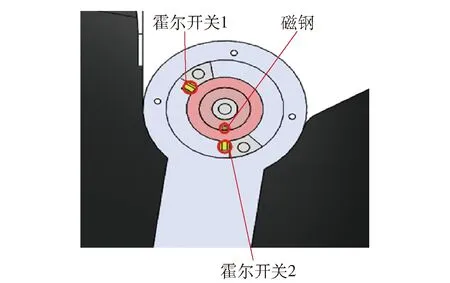
图9 触发能量释放模式的状态Fig.9 Trigger the state of the energy release mode
3) 能量保持模式:与能量释放模式作用时期相同,均为支撑中后期,不同之处为当膝关节屈曲20°时,膝关节处的角位移传感器将此时的信号传递至控制单元,使电磁铁通电吸合,电磁离合器断电脱离. 电磁铁吸合是为了将弹性储能部件卡死,防止能量释放,电磁离合器脱离过程是为了将膝关节屈曲运动与弹性储能的转动运动分离,实现下肢外骨骼跟随膝关节的自由摆动.
由于人体步态分为支撑期和摆动期(以右腿为例),为了使外骨骼最大化存储能量和被动式的跟随人体步态规律,将助力模式分为单步储能和多步储能. 单步储能是为了达到在一个完整的步态周期内,实现助力的效果,即(能量存储+能量释放)循环作用. 多步储能是为了达到在多个步态周期内进行能量存储,达到一步助力的效果,即(能量存储+能量保持)×N次+(能量存储+能量释放),最终可以实现 “关键一跳”的效果.
2 运动学和动力学分析
人体下肢的数学模型,尤其是运动学和动力学模型,是研究和控制下肢外骨骼的基础[12]. 本文将根据已知的姿态进行逆运动学求解得出各关节的角度变化,通过已知关节角进行逆动力学进行分析,得出各关节所需的驱动力.
2.1 逆运动学分析
本文仅对人体在矢状面运动时进行了分析,已知人体躯干质心的轨迹为(xbody,zbody)和足部的轨迹为(xankle,zankle),首先对支撑腿(右腿)的各关节角度进行计算,其中Lbody为躯干质心到右髋关节的距离,Lthigh为髋关节到膝关节的距离,Lleg为膝关节到踝关节的距离,如图10所示.

图10 支撑腿分析Fig.10 Support leg analysis
根据已知的躯干质心和右足的位置可以得出
H0=zbody-Lbody
(1)
(2)
(3)
(4)
(5)
αhR=π-(αkR+αaR)
(6)
通过式(1)~(6),可以计算髋关节转角为θhR=αhR-α0,膝关节转角为θkR=αkR-π,踝关节转角为θaR=αaR+α0.
同理,对摆动腿(左腿)进行关节角度的计算,如图11所示.

图11 摆动腿分析Fig.11 Swing leg analysis

(7)
(8)
(9)
(10)
αhL=π-(αkL+αaL)
(11)
由图11中的位置关系以及式(7)~(11),可以求得髋关节转角为θhL=αhL+α1,膝关节转角为θkL=αkL-π,踝关节转角为θaL=αaL-α1.其中Hankle是踝关节到地面的距离,由于得出的踝关节轨迹是相对于地面的位姿,在该分析中是以踝关节为原点进行分析的.
2.1 逆动力学分析
在分析下肢动态数学模型的时候,从能量角度出发,根据系统的动能和势能,建立相应的拉格朗日方程,进而分析和求解人体下肢的动力学问题.
拉格朗日函数L是动能K和势能P之差,即
L=K-P
(12)
因此,系统的动力学方程,即拉格朗日方程为
(13)
由于下肢可以看作是一个七连杆结构,故下肢的动能表达式为
(14)
式中:i=0,1,…,6,而0,1,…,6分别对应左右足、左右小腿、左右大腿和躯干的质心;Ii为相应部位绕其质心的转动惯量;qi为下肢相应部位与竖直方向的夹角.
下肢的势能表达式为
(15)
由于上文已经通过逆运动学求出各关节的转角,通过几何关系可得出各关节角θi=qi-qi-1.最终通过式(12)~(15),求得下肢动态模型方程

(16)

3 结果分析
3.1 机械结构验证
在整体结构设计过程中,为了减少膝关节储能装置的厚度,将太阳轮设计成中空结构,以便于将离合器置于其内,因此导致行星架结构比较单薄,作为传动机构与离合器的连接部分,行星架在传递扭矩时便成为一个薄弱环节. 以5 N·m助力效果为目标,在行星架处将会传递5 N·m的力矩,该设计中行星架材质采用45号钢,对其进行ANSYS静力学分析,如图12所示. 结果表明其最大应力66.19 MPa,而传统钢材的疲劳强度为355 MPa,故行星架在传动过程中不会发生断裂.

图12 行星架结构分析结果Fig.12 Planetary frame analysis results
在传动过程当中,系统的另一个薄弱环节为太阳轮和行星轮之间的接触位置,在传动时由于两齿啮合,极易发生断裂,因此需进行有限元分析和校核. 传动部件中的一级行星齿轮,经过计算得出传动比i=0.437 5(小腿做输入端,储能部分做输出端). 通过对太阳轮和行星轮的啮合处进行分析,计算了该接触点的应力,其结果如图13所示,发现在两齿啮合处的最大应力约为6 MPa,因此,在运动过程中,传动机构的强度足够实现所需扭矩的传递.
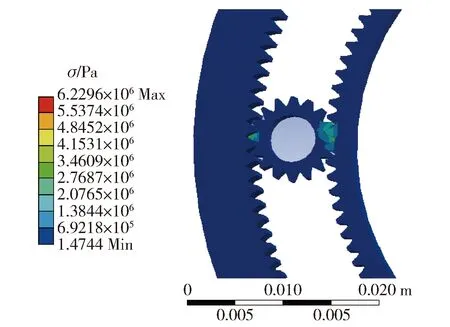
图13 齿轮啮合处受力分析Fig.13 Force analysis of gear meshing
3.2 仿真验证
在前文中的逆运动学和逆动力学分析基础上,通过MATLAB编程可得出一个步态周期内的膝、髋关节力矩变化曲线,分别如图14、15所示. 其中,膝关节和髋关节的角度方向规定沿关节中心顺时针方向为负,逆时针方向为正.
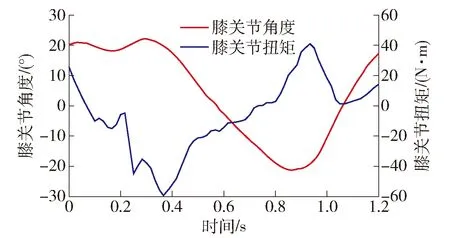
图14 膝关节角度和扭矩Fig.14 Knee angle and torque
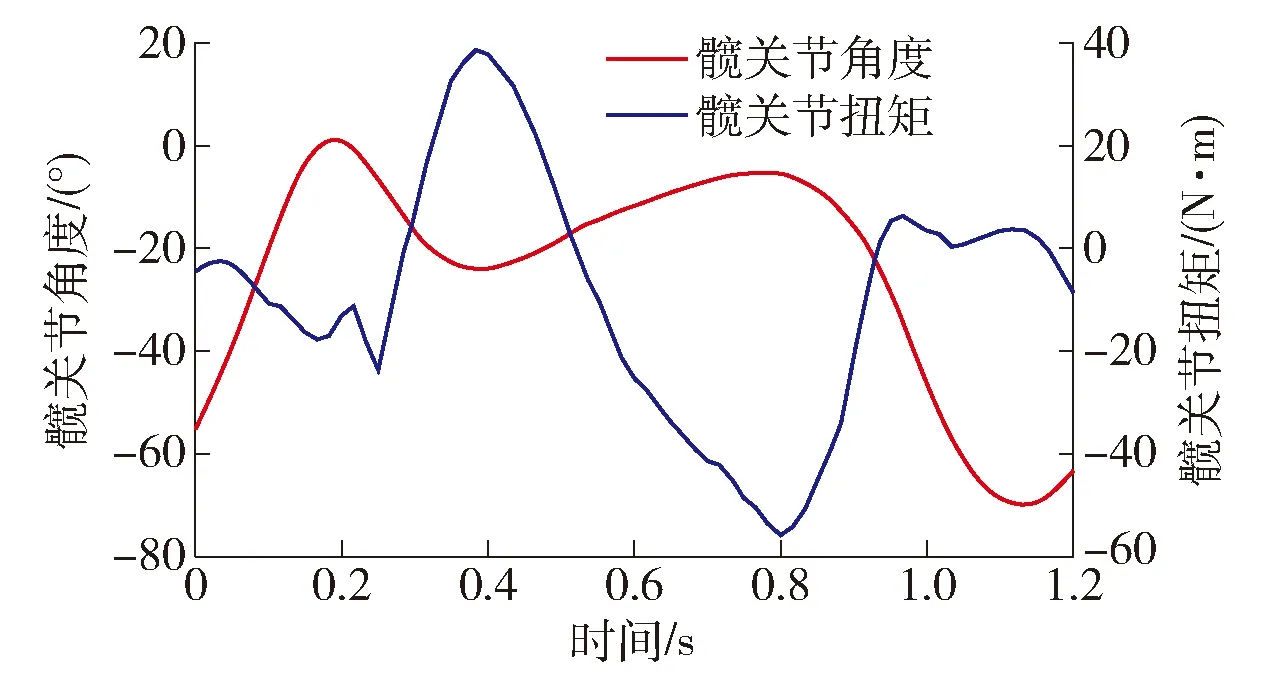
图15 髋关节角度和扭矩图Fig.15 Hip angle and torque
在验证模型结构设计合理并获取关节运动曲线后,通过将模型导入ADAMS软件进行仿真分析. 在人物模型和外骨骼模型的运动关节分别设置相应转动副,通过添加关节驱动函数对人体各关节实现驱动,由于在模型前进方向未添加任何驱动力,故需要在模型足底与地面添加接触模型,以库伦摩擦力的形式驱动模型前移[15]. 在实际中,外骨骼是通过绑带与人体实现连接,而ADAMS中为了实现外骨骼模型与人物模型的柔性连接,需在二者之间施加轴套力,该轴套力是一种两构件相互作用的弹簧和阻尼力,通过定义6个笛卡儿坐标系的力和力矩分量(Fx,Fy,Fz,Tx,Ty,Tz)在两构件间施加柔性力[16]. 通过仿真,可得出外骨骼各关节角与人物模型关节角的对比曲线图,如图16所示. 其中,蓝线为人物模型在仿真过程中髋、膝关节的运动轨迹,红线为外骨骼模型在仿真过程中髋、膝关节的运动轨迹. 通过曲线对比可以看出外骨骼模型中的关节曲线与人物模型的关节曲线虽然不能完全重合,但整体的运动趋势大致相同.
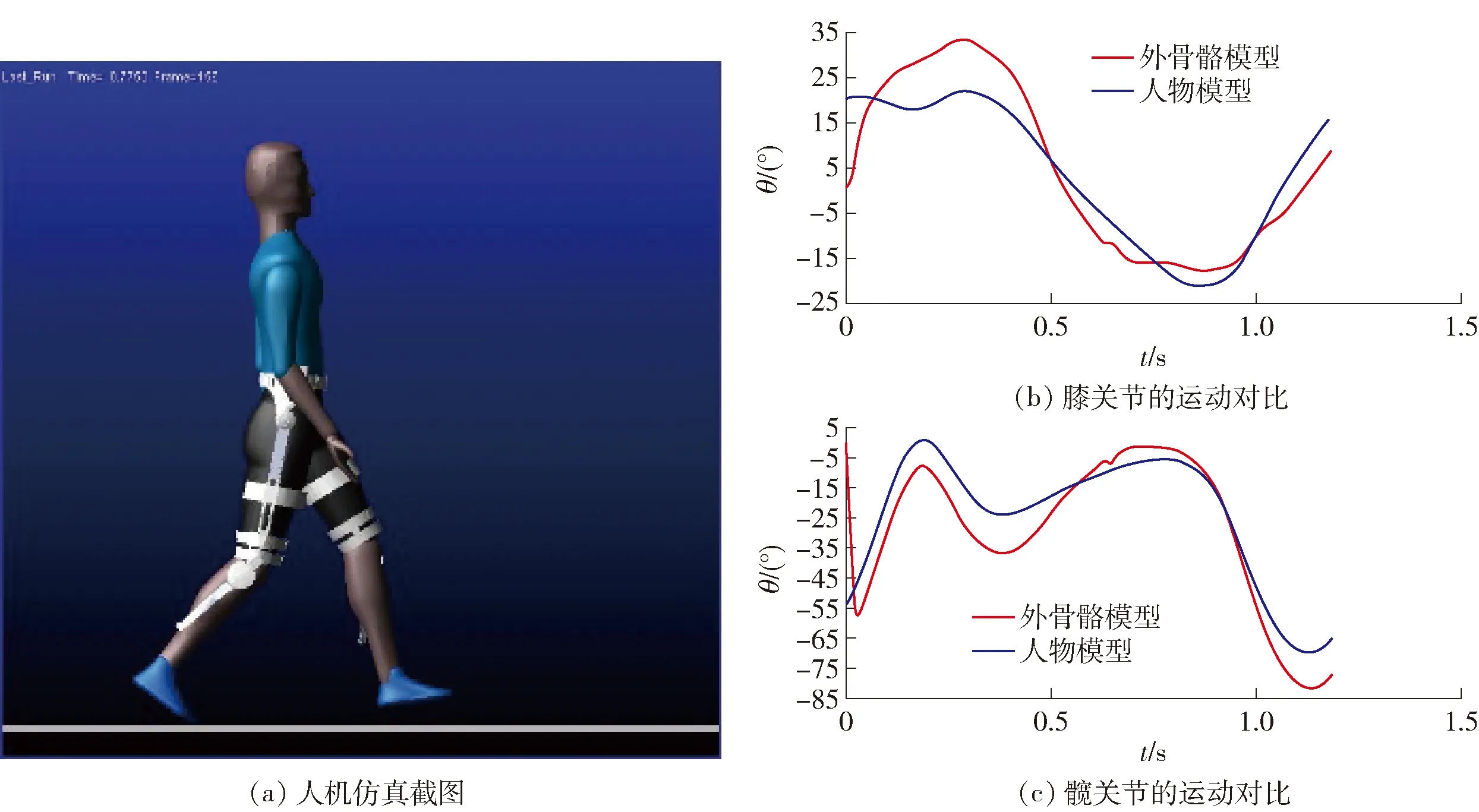
图16 关节曲线对比Fig.16 Joint curve comparison
在现实生活中,外骨骼也不可能完全贴合人体下肢一起运动,由于外骨骼与人体下肢通过绑带连接,在运动过程中外骨骼一般会与人体下肢有微小的相对运动,而图16恰好验证了该情况. 由于二者之间的相对运动,导致相应的关节曲线存在微小偏差,而这些偏差将会在人体下肢产生作用力. 通过在ADAMS中对外骨骼和人物模型之间建立的轴套力,可以仿真二者之间在一个步态周期中产生于人物模型下肢的作用力,其结果如图17所示. 其中,x方向的力是由于外骨骼与人物模型相互挤压沿腿部外侧垂直方向产生的作用力,y方向的力是由于二者相对运动在沿腿部竖直方向产生的作用力,z方向的力是由于二者相对运动在沿腿部水平方向产生的作用力. 通过观察结果可以看出,当外骨骼模型开始跟随人物模型运动后,其产生的3个方向的作用力基本在很小的范围内浮动. 通过分析外骨骼与人物模型之间的轴套力,可以验证二者在运动过程中即使关节轨迹有偏差,但最终在下肢产生的作用并不是很大,因此在实际生活中,该作用力并不会影响人体的正常运动.
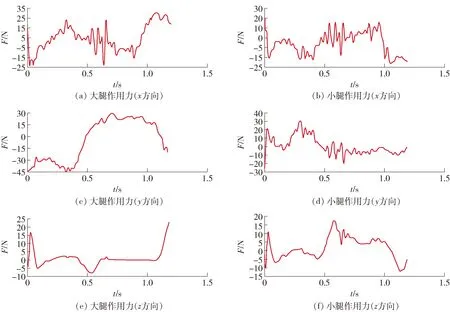
图17 轴套力分析曲线Fig.17 Bushing force analysis curve
4 实验验证
为了进一步验证该外骨骼的实际助力效果,对实验者在有、无穿戴外骨骼行走的条件下进行人体心率和呼吸频率测量. 分别以4、5和6 km/h的行走速度运动相同的距离进行测量. 为了避免软件测量造成的误差,决定采用通过对比穿戴该下肢外骨骼前后的心率和呼吸频率参数与人体静态时的初始心率和呼吸频率参数的比值来间接验证下肢外骨骼的助力效果.
如图18、19所示,在穿戴外骨骼后行走时的心率平均可减少7%,呼吸频率平均可减少5.11%. 通过穿戴该下肢外骨骼行走,行走时的心率和呼吸频率都有所降低,这表明该下肢外骨骼在辅助人体行走时可以起到一定的作用,从而间接地证明了穿戴该下肢外骨骼可以起到减少人体能耗的功能,验证了其助力的功效.

图18 心率对比Fig.18 Heart rate comparison
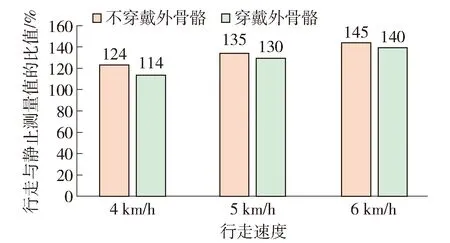
图19 呼吸频率对比Fig.19 Respiratory frequency comparison
5 结论
1) 根据关节运动建立了一种准被动式储能下肢外骨骼,通过控制3种能量状态实现对人体行走助力. 其中,髋关节储能装置可在支撑期完成储能,为在摆动期抬腿提供助力;膝关节储能装置可在支撑期完成助力,而在摆动期实现自由摆动.
2) 由仿真结果可知,在穿戴外骨骼行走时,在人体大、小腿绑带处会存在相互作用力,该作用力会在人体可接受的一个范围内浮动,进而不会对人体造成不适.
3) 通过对未穿戴和穿戴外骨骼样机进行实验对比,该准被动式的下肢外骨骼在减少人体行走时能量消耗方面有一定的积极作用.
