计及充电站无功补偿的配电网日前-实时协调优化模型
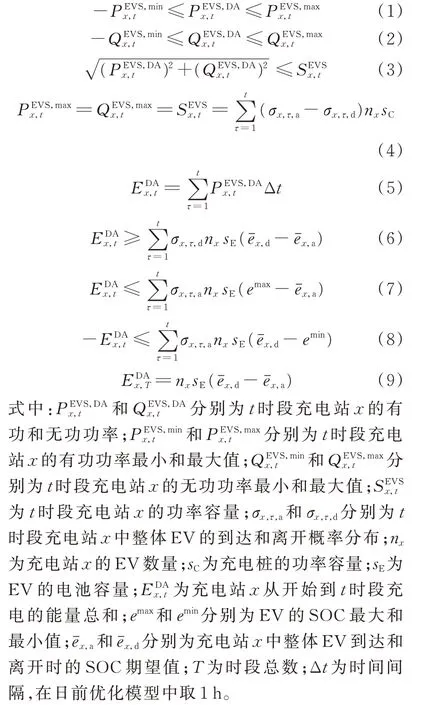
2021-09-13王强钢田雨禾胡方霞周念成
王强钢,田雨禾,王 健,胡方霞,周念成
(1.输配电装备及系统安全与新技术国家重点实验室(重庆大学),重庆市 400044;2.重庆工商职业学院电子信息工程学院,重庆市 400052)
0 引言
近年来,环境污染和化石能源危机日益严重。绿色高效的电动汽车(electric vehicle,EV)对解决环境和能源问题起到了重要作用,EV接入配电网规模也日益增加[1-2]。但EV充电负荷具有随机性和分散性,大规模EV接入配电网将产生不可忽视的影响,可能引起线路过载、网损增大或在负荷峰值时段造成配电网低电压问题[3-4]。这对配电网安全稳定运行提出了挑战,故需要对EV充放电进行控制。
针对EV的充放电控制,文献[5]提出了EV分级充电控制策略用于降低配电网负荷峰谷差,文献[6]建立了基于区域交通网和出行链模拟的EV充电负荷预测模型,文献[7]建立了基于路网-电网交互式框架的EV充电负荷预测模型。据此,文献[8]分析了在充电价格差异较大的情况下,通过电动汽车入网(V2G)技术能够降低配电网运营成本。上述文献集中于EV的有功功率控制,但EV通过充电桩的变流器接口接入电网,除有功功率外,还有一定的无功补偿能力,可用于改善配电网电压质量[9-10]。
配电网电压调节主要有电容器组(capacitor bank,CB)和有载调压变压器(on-loadtap changer,OLTC)等装置[11-12]。然而,传统电压调节装置响应速度慢,应对EV不确定接入的能力较差。而充电桩具有灵活、快速的控制特性,对EV主动控制能够有效地改善配电网的电压分布[13]。文献[14-15]利用双向充电桩进行电压调节,文献[16]基于对充电桩的功率因数调节的策略来实现节点电压稳定运行。前述文献仅分析了充电桩的无功功率调节能力,但未与配电网已有的电压调节装置进行综合调控。
当EV充放电控制时须考虑其荷电状态(state of charge,SOC)约束,文献[17]建立了考虑EV数量和SOC约束的EV可调度模型,文献[18]建立了考虑移动储能特性的EV模型,但仅考虑EV统一的SOC边界约束(即固定的最大和最小区间),未考虑不同EV的SOC边界差异。对此,文献[19]提出了计及SOC边界的EV接入配电网的实时优化调度方法,在此基础上,文献[20]提出了一种基于聚合商模型的大规模EV的SOC评估方法。但是,现有研究采用的SOC边界没有计及EV前一时刻SOC的影响,可能造成邻近SOC边界时EV的功率分配不当导致SOC越限。
为解决以上问题,本文提出了一种计及充电站无功补偿的配电网日前-实时协调优化模型。日前优化模型以配电网运营成本最低为优化目标,有载调压变压器和电容器组等设备调节限制为约束条件。然后,实时优化以日前优化结果为运行参考点,通过多层优化模型之间协调互补,实现配电网、电动汽车充电站(electric vehicle charging station,EVS)和EV之间功率的有效分配。此外,为保证EV离开时达到期望SOC,充分考虑了SOC边界条件。最后,通过算例分析验证了该模型的有效性。
1 日前-实时协调优化框架
计及充电站无功补偿的配电网日前-实时优化框架如附录A图A1所示。框架由日前优化和实时优化两部分组成,日前-实时优化框架中配电网、充电站和EV的具体执行步骤如下。
步骤1:在日前优化部分,充电站将所有EV数据的概率分布传输给配电网,包括初始时刻、离开时刻、初始SOC和离开时的SOC。
步骤2:配电网根据信息,结合分时电价、负荷需求曲线、网络参数、有载调压参数和电容器组参数,建立了配电网运营成本最低的优化模型。
步骤3:将充电站日前有功功率、电容器组投切和有载调压挡位作为实时优化的参考运行点,以降低实时优化中配电网的运营成本。
步骤4:在实时优化部分,当EV接入充电桩后,充电站根据EV的初始时刻、离开时刻、初始SOC和离开时的SOC,计算出其有功功率范围和SOC范围,然后将信息提供给配电网。
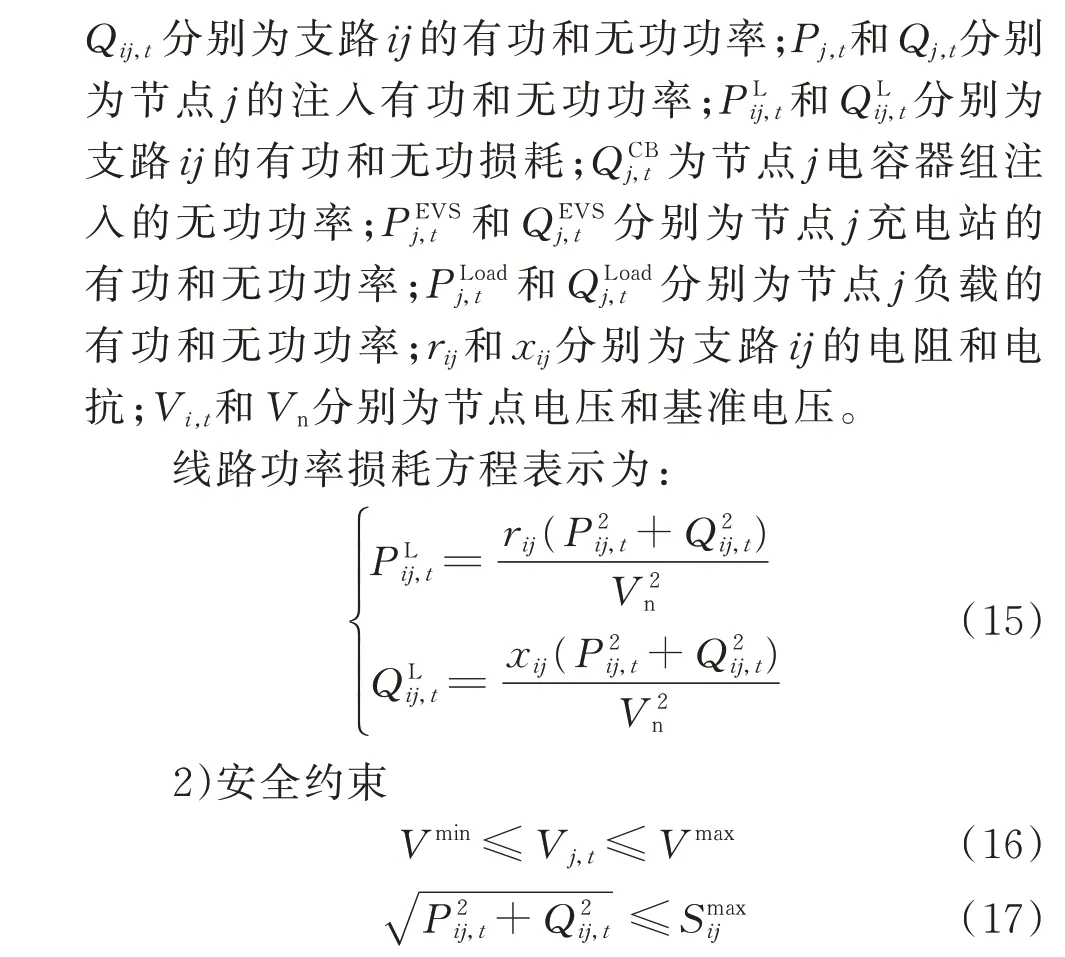
步骤5:配电网根据信息,结合充电站日前有功功率,建立以充电站有功功率偏差最小为目标的优化模型,计算出充电站的有功功率。
步骤6:充电站根据信息建立以EV的总无功容量最大为目标的优化模型,计算出EV的有功功率和最大无功容量。
步骤7:充电站根据EV的最大无功容量,计算出充电站的最大无功容量,然后将信息提供给配电网。
步骤8:配电网根据信息建立以网损最小为目标的优化模型,计算出充电站实际的无功功率。
步骤9:充电站根据信息建立以EV的总视在功率最小为目标的优化模型,计算出EV实际的无功功率。
步骤10:EV在步骤6和9中执行来自充电站的有功和无功功率信号。
步骤11:下一个时间周期的EV参数更新时,重复步骤4至步骤10。
2 日前优化模型建立
2.1 EVS日前功率模型
EVS日前功率模型是基于整体EV数据的概率分布进行建模,不同EV的充放电状态不同,而不同状态对应的损耗模型也有所区别。在日前优化中忽略了充放电损耗,表达式为:
2.2 日前优化模型
日前优化模型约束条件包括潮流方程、安全约束、有载调压变压器约束和电容器组装置约束。
1)潮流方程
文献[21-22]采用线性化DistFlow模型来表示潮流方程,且考虑了系统网损。本文基于DistFlow线性化方程,配电网的潮流方程表达式为:
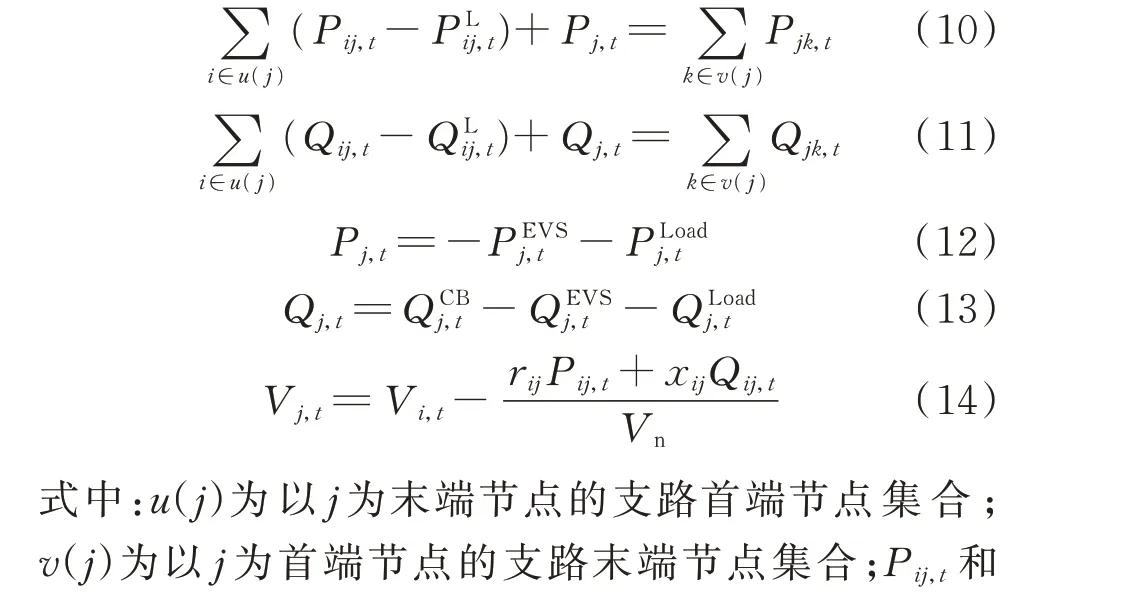

3)有载调压变压器约束
本文对有载调压作了简化处理,将变压器模型等效为一个节点处理,即不考虑变压器支路,节点电压变成可调变量,即

4)电容器组装置约束
本文假设每组电容器的调节容量一定,通过调节投运组数来优化电网运行情况,即
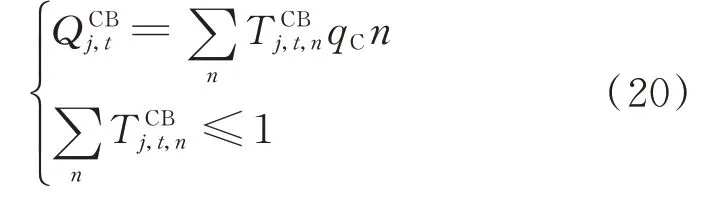

式中:ct为分时电价;cL为损耗成本;cC为电容器组无功补偿成本;cQ为EV无功成本;Pg,t为从上级电网注入配电网的有功功率;E为网络中所有支路集合;NCB为包含电容器组装置的节点集合;NEVS为包含充电站的节点集合;cT为每次有载调压的成本;nT为T时段有载调压的总次数。
3 实时优化模型建立
3.1 EV功率模型
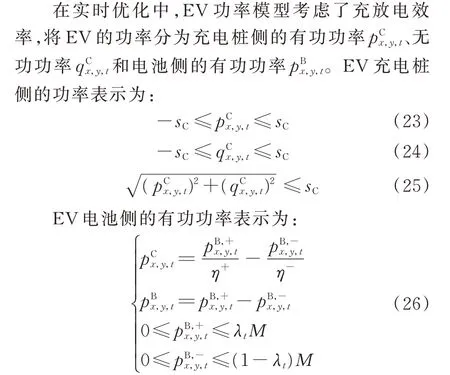
EV的SOC表 示 为:

式中:ex,y,t为t时段充电站x中第y个EV的SOC;在实时优化模型中,时间间隔Δt取15 min。
当EV接入充电桩时,通过EV上的电池管理系统获取电池当前SOC、EV停留时间和离开时期望的SOC,来确定SOC边界[19-20]。如图1所示,红色和绿色曲线分别表示SOC的上边界和下边界。
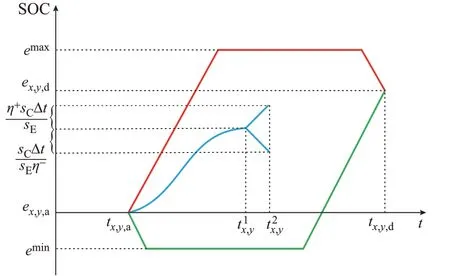
图1 EV的SOC动态边界Fig.1 Dynamic SOC boundary for EV
在本文的模型中,配电网首先是调度充电站,如果充电站的SOC边界仅基于EV的SOC边界,则可能会增加其SOC边界的范围,导致优化时可能造成邻近SOC边界时EV的功率分配不当导致SOC越限,而不能确保EV离开时达到期望的SOC。为了解决此问题,考虑EV前一时刻的SOC。SOC动态边界表达式为:
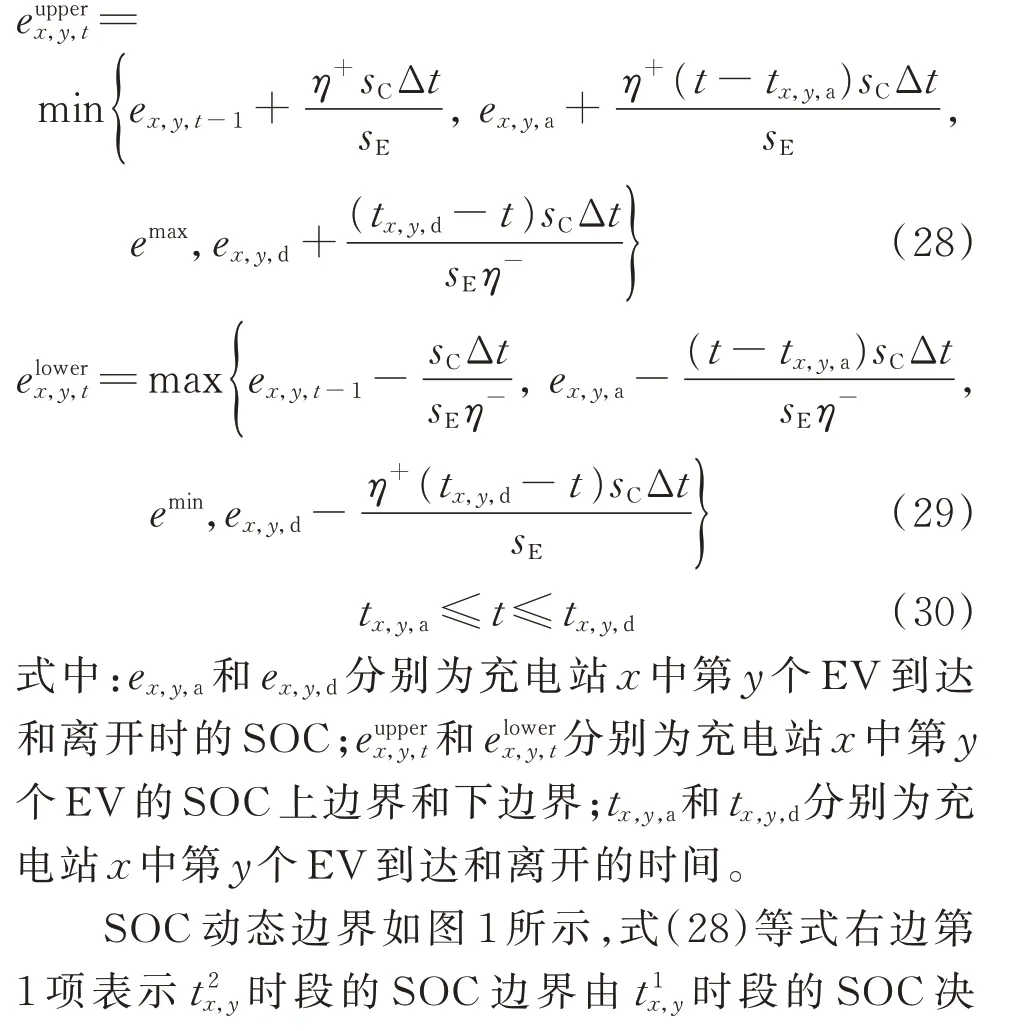

式 中:NEV为 充 电 站x中EV的 集 合;Ex,t为t时 段 充电站x内所有EV的SOC总和。
3.3 实时优化模型
实时优化模型包括配电网和充电站的有功和无功优化模型。
1)模型1为配电网有功优化模型
当EV接入充电桩后,提供电池当前SOC、停留时间以及离开时期望的SOC等信息,充电站根据EV信息产生其电池侧功率范围和SOC范围。配电网基于充电站提供的信息和充电站日前有功功率建立优化模型,配电网有功优化模型优化目标是充电站的有功功率偏差最小。


由此,该目标函数线性化为:

约束条件为式(33)至式(36)。
模型1是被设计来决定每个充电站电池侧的实际功率,同时有功功率偏差最小能够有效减少配电网运营成本。
2)模型2为充电站有功优化模型
在确定充电站电池侧的有功功率之后,通过以下优化模型可以得到EV电池侧的有功功率,即

约束条件为式(23)、式(26)至式(30),以及式(39)和式(40)。
模型2的优化目标是EV的总无功容量最大,而且确保EV有足够的无功补偿能力。
3)模型3为配电网无功优化模型
充电站将基于EV的无功容量和有功功率提供给配电网,通过以下优化模型可以得到充电站的无功功率,即

约 束 条 件 为 式(10)至 式(21)和 式(31)、式(32)。
模型3的优化目标是网损最小。
4)模型4为充电站无功优化模型
基于充电站的无功功率,通过以下优化模型可以得到EV的无功功率,即

约束条件为式(24)、式(25),以及式(43)和式(44)。
式 中:sx,y,t为t时 段 充 电 站x中 第y个EV的 视 在功率。
模型4的优化目标是EV的总视在功率最小,同时避免充电桩的过载情况。
式(3)、式(15)、式(17)、式(25)、式(32)、式(39)和式(43)是非线性方程,会增加优化模型求解的难度,文献[23]通过圆约束和二次平方项线性化的方法对方程进行线性化处理。本文采用分段线性化法将日前优化和实时优化模型线性化处理。
4 算例分析
4.1 算例基础数据
本文采用IEEE 33节点系统来验证模型的有效性。算例是采用MATLAB R2018a-YALMIP仿真平台进行测试,并调用CPLEX12.10.0版本进行优化求解,电脑的硬件参数为主频3 GHz、内存8 GB[24]。
IEEE 33节点系统如图2所示,节点1为有载调压变压器,初始挡位为3,有5个调节挡位,调节范围为[0.98,1.02]。节点3、8、14、19、23、30为EVS,每个节点有100台EV进行充电,充电桩功率容量为7 kVA,电池容量为60 kW·h,充放电的效率为95%。EV的到达和离开概率分布分别符合正态分布N(19 h,12)和均匀分布U(6 h,8 h),初始SOC符合正态分布N(0.6,0.12),离开时的SOC值都设为0.95。节点10、16、28安装有电容器组投切装置,其中每个节点为4组,每组大小为0.05 Mvar。节点电压限制是[0.95,1.05]p.u.。负荷需求和分时电价如附 录A图A2所示,EV的 控制周期为17:00—次日08:00。
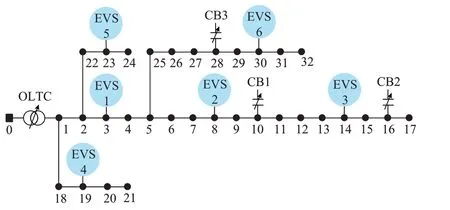
图2 IEEE 33节点系统Fig.2 IEEE 33-bus system
4.2 日前优化结果分析
为了验证充电站无功补偿在日前优化模型中的有效性,设立如下3个案例进行分析。
案例1:无有载调压和电容器组投切装置,EV的无功功率不可注入。
案例2:投入有载调压和电容器组投切装置,EV的无功功率不可注入。
案例3:投入有载调压和电容器组投切装置,EV的无功功率可注入。
表1所示为不同案例日前优化模型的仿真结果。
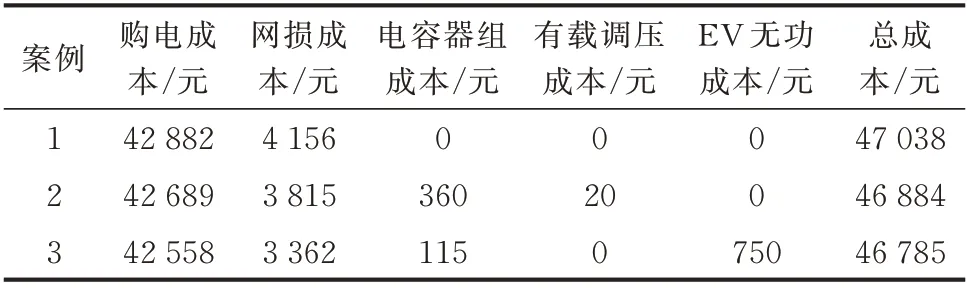
表1 日前优化结果Table 1 Results of day-ahead optimization
案例1没有考虑有载调压、电容器组投切装置和EV无功成本,购电成本、网损成本和总成本在3个方案中最高。相比于案例1,案例2增加了有载调压和电容器组投切装置,购电成本、网损成本和总成本都有所降低。在案例3中,注入EV的无功功率使得购电成本、网损成本、电容器组成本进一步减少,总成本在3个案例中最低。
附录A图A3为不同案例日前优化模型的配电网电压曲线。在案例1中,平均电压和最低电压均存在低于电压下限的情况;案例2通过投入有载调压和电容器组投切装置提升了配电网节点电压,节点28~32的最低电压低于电压下限,如附录A图A4所示,有载调压调节一次到5挡,电容器组投切组数较多;案例3通过增加EV的无功功率进一步改善配电网节点电压,相比于案例2,所有节点电压均在电压下限之上,有载调压调节挡位没有调节,电容器组投切组数大幅减少。
4.3 实时优化结果分析
实时优化模型被称为案例4。案例4中购电成本、网损成本、电容器组成本、有载调压成本、EV无功成本和总成本分别为42 592、3 521、115、0、631、46 859元,总成本比案例3更高,因为日前优化模型是基于整体EV概率分布的,仅考虑到EV的数量、电池容量和充电桩功率容量,忽略了每个充电桩的有功和无功功率约束,以及EV的SOC边界,会造成日前优化模型中充电站提供的无功补偿范围更大,方案3中购电成本和网损成本更低一些。附录A图A5为案例4的配电网电压曲线,可见所有节点电压都大于电压下限,电压曲线与案例3大致相同,证明日前优化模型能够作为实时优化模型的参考对象。
案例4中充电站的有功和无功功率如附录A图A6所示。17:00—20:00处于负荷高峰阶段,充电站的有功功率很小,20:00—21:00充电站有功功率开始注入配电网。在负荷低谷阶段,充电站有功功率从24:00开始增加到次日05:00,后因EV逐渐离开充电站,有功功率从05:00开始降低。充电站的无功功率通常为负,说明EV在配电网进行无功补偿,在高负荷需求时段(19:00—23:00)有大量无功功率注入配电网。
4.4 求解效率分析
通过分段线性化法将日前优化和实时优化模型线性化处理,日前优化模型是线性规划模型,实时优化的模型1到模型4是线性规划或者混合整数线性规划模型[23]。日前和实时优化求解时间如表2所示。日前优化求解时间小于10 s,实时优化求解时间小于0.1 s,能够满足EV的实时优化运行要求。
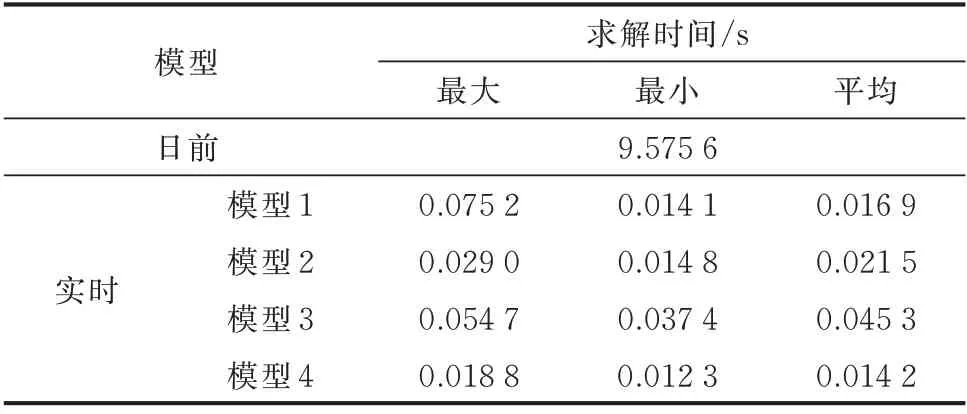
表2 日前和实时优化求解时间Table 2 Solving time of day-ahead and real-time optimization
5 结语
本文提出了一种计及充电站无功补偿的日前-实时协调优化模型,通过算例分析,结果表明:
1)日前优化模型能够提供配电网运营成本最小的优化结果,基于日前优化结果和EV实时参数建立实时优化模型,日前和实时优化之间紧密联系,综合提高了配电网经济性;
2)当注入EV的无功功率时,配电网运营成本最低,EV通过充电桩分担了一部分无功补偿需求,使得电容器组补偿的无功功率和有载调压调节次数有所下降,对配电网电压调节有着积极的影响;
3)在满足期望的SOC需求基础上,EV可根据分时电价错开负荷高峰期进行充电,避免增加配电网负担。
附录见本刊网络版(http://www.aeps-info.com/aeps/ch/index.aspx),扫英文摘要后二维码可以阅读网络全文。