面向节能的高速列车追踪控制方案研究
2021-09-12贾宝通孟学雷贾飞马阳阳任媛媛
贾宝通,孟学雷,贾飞,马阳阳,任媛媛
(兰州交通大学 交通运输学院,甘肃 兰州730070)
列车的节能运行是一个非常复杂且困难的优化问题,需要控制列车在运行时间、运行距离以及速度限制的约束条件下使列车安全节能地运行到站。一般研究只对单列车节能优化,亦或是多列车优化时并未考虑到追踪列车与前行列车的相互干扰使得其整体优化问题太过于理想化。列车牵引控制目的是使列车在安全的速度位置曲线下有序运行并节省列车运行中消耗的能源。高速列车速度曲线控制下的列车运行策略对于列车运行能耗有着很大的影响,数学优化方法作为最高效的节能技术之一,优化列车运行从而寻求更节能的运行牵引控制策略已被广泛研究并应用。HUANG 等[1]将多列车在多个车站节能运行策略和列车时刻表调整结合起来,设计了遗传算法优化多列车运行,得到列车运行时间和能耗之间的关系,设计粒子群算法获得了所有列车的最佳运行时间;MO 等[2]提出一种优化速度曲线的整数规划模型,将列车运行整个阶段分为多个不同的速度曲线排列组合,得到其中最优的列车运行速度曲线;FAROOQI 等[3]提出了一种应用于非线型系统的模型预测控制方法应用到列车运行,这种方法可以考虑空间状态变量的各种约束,是一种多变量控制策略;YIN 等[4]以耗能最小、列车总延误时间和总出行时间最小为目标构建了模型,设计了一种类似动态规划的算法求解问题;ALESSIO等[5]推导出一个列车阻力方程来计算风对列车节能速度曲线的影响。结合感应器传输的数据利用线搜索框架和动态最短路径算法得到列车节能优化速度曲线;付印平[6]以单列车在线路上运行的基础上建立了移动闭塞条件下追踪列车的节能优化模型;纪云霞[7]以高速列车工况转换点作为模型变量,在传统遗传算法中加入了与列车运行状况相符合的种群化方向引导机制,从而提高了算法性能。但只考虑到单车和单线,使得再生制动能的考虑意义不大;张勇[8]从列车运行控制和停车制动控制两方面研究了列车节能优化操纵问题,从而在优化列车运行工况序列的基础上避免了二次制动停车的情况,更有效的实现了列车的节能降耗。但设计的模型普适性较低,只能局限于特定型号的货运列车。李丹[9]将列车操纵序列设为控制变量建立了城市轨道交通列车的节能操纵优化模型,来研究城市轨道交通中前行列车对追踪列车工况以及能耗的影响;伍建伟等[10]以速度为设计变量,将其他变量统一用速度表示,从而避免了数学关系不明确,求解困难等问题,但把区间端点视为列车工况改变点其实不太合理;杨杰等[11]分析了不同运行模态下列车受力情况,进而在传统四阶段的基础上加入司机等操纵列车的先验经验对求解过程进行启发引导。但时间步长取值较大,导致能耗、位移、速度等的计算结果精确度不高;冉昕晨等[12]在考虑荷载变化的同时实现多列车再生制动能量的协同利用,完成节能运行目标。但将每个区段客流设置为固定参数,不符合实际情况。综上所述,部分文献将列车工况改变点设置为区间端点[10];部分文献没有考虑到多车追踪的条件[1,4,7−8]。因此,本文在前人的基础上提出了面向节能的高速列车追踪控制研究。由于本文主要考虑追踪列车在移动闭塞条件下在安全距离约束下前行列车对后行列车节能优化的影响,因此本文只研究追踪列车在节能优化条件下的速度位置曲线而不考虑再生节能优化。
1 基于移动闭塞条件的追踪列车模型建立
1.1 问题描述
首先建立前行列车节能优化模型并求解,利用前行列车的当前位置速度以及2列车之间的距离建立追踪列车模型。引入物理学引斥力现象设计追踪算法,由于引入引力和斥力思想可以更加清楚地描述出前后列车的关系以及互相影响的机制,因此将物理学中引力和斥力随距离变化而变化的这种现象作为研究追踪列车节能优化的方法。为了更好地理解文章,将文章中所用的符号标定到表1。

表1 模型符号定义表Table 1 Definition of model symbol
1.2 模型基础
高速列车运行工况一般为4 个:1)牵引加速;2) 巡航;3) 惰行;4) 制动。上述4 种工况在列车运行过程中根据牵引控制策略交替出现,共同构成列车在区间的牵引控制过程。
为了了解列车在这4种工况下的列车受力,计算列车在工况条件下的列车运行牵引控制方案,本文采用牵引计算中的列车运动学方程进行推导和计算。
根据列车运动规律以及线路条件对高速列车进行受力分析可得:

此运动方程可明确列车运行时在各工况条件下加载在列车上的各种力并且为计算列车位置和速度等提供了支撑。由式(1)分析推导可计算出列车运行状态并且得出加载在列车上的力合成方式从而确定工况。其中列车牵引力的计算依靠给定车型后提供的牵引力特性曲线确定,一般采用插值法或者经验公式求得。列车单位牵引力计算公式为:
列车阻力一般分为列车运行时产生的基本阻力和线路产生的附加阻力。基本阻力的计算公式为:

其中,α,β和γ为经验系数,只和动车组车型有关;附加阻力一般分为3 部分: 坡道附加阻力;曲线附加阻力;隧道附加阻力。其单位附加计算公式分别为:文中不考虑。因此单位附加阻力为:

列车制动力的计算是依靠列车制动特性曲线来获得的,单位制动力的计算公式为:
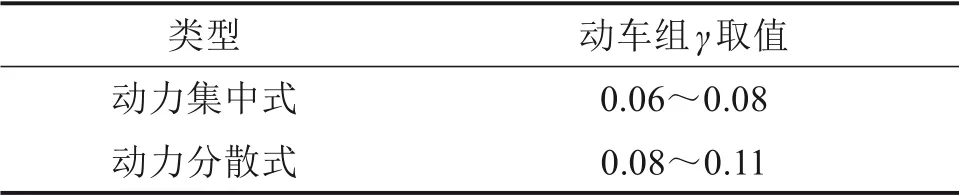
表2 不同车型回转系数取值Table 2 Rotation coefficient values of different models
1.3 单列车节能优化模型
列车能量消耗一般由3 部分组成:牵引力做功、车载固定设备的消耗(如空调,照明等)和损失的能量(热能等)。
即节能优化模型的目标函数:

因为后2部分必须消耗且一般为固定值,考虑这部分的节能问题并没有实际意义所以在模型中将不会体现。
则函数可改写为:

由于变坡点位置、变限速点位置以及工况改变点位置都会对列车行驶过程和运行状态造成影响,因此需将整个过程离散化,将每个改变点xgbi(变坡点、变曲线点、变限速点以及工况改变点)位置按顺序排列,可得到一组区间划分关系最终形成N个子区间,在所划分的子区间中,可将列车运行看作为加速度、合力和距离都确定的过程。
这时函数为:

其解为:

其中z为列车工况,取值为{−1(制动),0(惰行),1(巡航),2(牵引加速)}。xc为对应工况改变点的位置。
约束如下:

工况转换约束见表3。

表3 工况转换约束Table 3 Constraints of working condition conversion
其每个分段内的各项计算如下:
利用时间步长迭代法计算列车运行时每一步的速度,距离。时间步长设置为:n=T/Δt,其中Δt=ti+1-ti,那么第i步的末速度为:

距离为:

其中

式(8)为最终的目标函数,N为改变点形成的子区间个数;ni为在每个子区间中的迭代次数。目标函数为计算列车在每一个阶段每一个步长下能耗消耗。式(9)为决策变量。式(10)为速度约束,表示列车起始点速度都为0。式(11)为列车运行过程中高低限速;式(12)表示高低限速的分段函数;式(13)保证精确停车;式(14)保证了列车满足区间运行时间;式(15)表示工况改变点的实际情况;式(16)表示改变点的排布。
1.4 追踪列车模型
追踪列车的节能优化模型首先确定闭塞方式。
移动闭塞方式下列车追踪间隔的计算一般有2种:相对制动和绝对制动。
本文采用相对制动方式,因为在列控系统越来越高效和安全的前提下,是很有可能实现相对制动下列车运行的安全性的,并且相对制动模式下可进一步减小追踪时间间隔,从而提升线路的通行能力,增加了行车密度。
相对制动方式下对前车的追踪距离约束为:

则
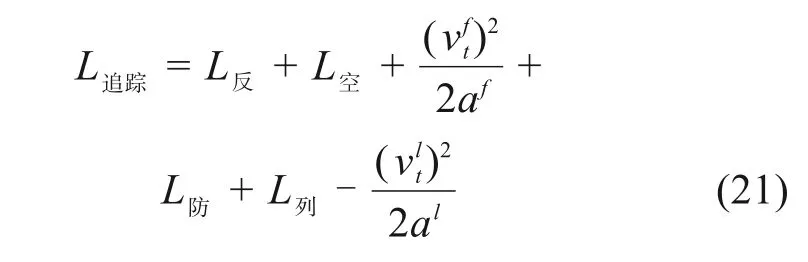
在t时刻前车位置减去追踪列车位置需要大于相对追踪距离:

追踪速度约束:

式中:Vlim为列车限速,m/s。
所以模型为:

式(23)表示追踪列车受前车限速影响约束。其余约束条件阐述见上节。
2 算法设计
2.1 基于改进的人工蜂群算法
本文采用人工蜂群算法来求解单列车节能优化模型,由于其模型为有约束的优化模型,因此将距离时间约束转化为罚函数,以罚函数和目标函数和的倒数作为算法的适应度值。算法与模型对应量如下:
蜜源的位置对应列车节能优化的一个可能解即工况改变点数组;蜜源的花蜜量对应一个可行工况改变点数组的适应度值;采蜜蜂的数量或者观察蜂的数量等于工况改变点数组的数目;维度代表数组内工况改变点的个数。
结合模型和列车节能策略对算法的改进办法:
1) 在搜索新解时在当前最优解附近更新,从而通过全局引导加快了算法的收敛速度,而且也加强了对全局最优解附近的搜索能力。
2) 通过借鉴遗传算法中的交叉运算来加强蜂群算法的开发能力,得到基于交叉操作的全局人工蜂群算法。
3) 结合节能策略可对生成初始解进行一定的约束,使得惰行时间加长从而加快算法收敛速度,设置工况改变序列从而使算法更容易收敛。
算法具体实现流程如下:
根据线路条件将工况改变点设置为7个,即蜂群算法的维度为7;为了使得算法更简单准确,本文按照线路条件将工况序列设置为(牵引加速、巡航、惰行、牵引、巡航、惰行、制动)。
Step 1:对于n= 0时刻,根据2个车站之间的距离随机生成Ns个工况改变点位置数组X1,X2,⋅⋅⋅,XNs,具体随机产生的解向量Xi为:

式中:和为车站的终点和起点;j取值于{1,2,⋅⋅⋅,7},为7(数组内工况改变点的个数,取7)维解向量的某个分量。 即Xi=[X1,X2,X3,X4,X5,X6,X7]分别计算每个可行解的适应度函数值即列车能耗的倒数并将排名前一半的作为初始的采蜜蜂种群X(0)。此时列车节能优化初始化种群完成。
Step 2:对于第n步的采蜜蜂X(n),在当前位置向量附近邻域进行搜索新的位置,搜索公式为:

式中:j取值于{1,2,⋅⋅⋅,7},k取值 于{1,2,⋅⋅⋅,Ne},且k≠i,k和j均随机生成,第一个rand()为[-1,1]之间的随机数。X G为当前找到的最好的工况改变点位置向量。
Step 3:将蜜蜂搜索到的新工况改变点向量new_Xi和迭代最优工况改变点位置向量按下式进行交叉操作。

按照贪婪选择算子选取具有更优适应度的,保留给下一代种群,其概率分布为:
Step 4:各观察蜂依照采蜜蜂种群适应度值的大小选择一个采蜜蜂,并在其邻域内同样进行新位置的搜索,该选择算子是在一个采蜜蜂种群内选择一个个体,选择概率由下式决定:
式中:fiti是第i个工况改变数组对应的适应度函数值。
Step 5:同Step 2 和Step 3,并记下种群最终更新过后达到的最优适应度值,以及相应参数。
Step 6:在某只采蜜蜂的周围,当搜索次数记录变量Bas达到一定阈值Limit而仍然没有找到更优位置时,重新随机初始化该蜜蜂的位置。

如果到达迭代次数[13],则停止计算并输出最优适应度值、对应的能耗值及对应的列车工况改变点序列,否则转向Step 2。
2.2 借鉴分子间引斥力的追踪工况改变算法
以2个分子间的距离类比列车追踪过程中追踪距离的变化过程。以引斥力的大小来表示前车与追踪列车之间距离的偏离程度,在列车运行过程中,列车之间的实际追踪距离与理想距离产生的差值来决定工况改变机制,因此将引斥力大小与距离之间的关系表征到列车追踪行为这一操作中,从而抽象出一个用来求解后行追踪列车工况改变的方法:
当实际追踪距离大于理想追踪距离时,差值大于0,分子间距离超过平衡点,由分子间产生引力来表示两列车之间产生一个虚拟的引力(此虚拟力最终表现为工况的改变),表现为使列车间距减小;当实际追踪距离小于理想追踪距离时,机制同上,使列车间距增大。在此虚拟力的影响下列车改变或保持当前工况,使列车始终处于一个合理的追踪距离。


2列车实际距离为:

那么算法设计如下。
参数设定:前车运行过程为单列车节能优化模型求解过程,追踪列车计划运行过程也为单列车节能优化模型求解过程。由于中间存在区间追踪间隔τ,所以当追踪列车计划运行到第i步时,前行列车为第(i+(τ/0.002))步。
Step 1:记录前车出发时刻,求出在节能运行下的前车位置、速度以及工况。以及追踪列车的计划位置、速度及工况。
Step 2:追踪列车采用计划工况计算,在每个步长中利用前车以及计划追踪列车的位置代入式(28)、速度和加速度代入式(25~27)进行比较。判断追踪列车是否到站,若到站,算法结束;否则利用单列车计算结果中的步长数判断前行列车是否到站(等于单列车计算步长数时,前行列车到站),若没有到站,跳到Step 3;否则跳到Step 9。
Step 3:如果式(28)大于式(27),则跳到Step 4,否则到Step 6。
Step 4:判断是否有牵引力:若有则追踪列车以计划工况运行一步后返回Step 2;若没有则跳到Step 5。
Step 5:追踪列车以牵引状态计算一步。判断速度是否超速:若超速以巡航状态运行一步;否则以牵引状态运行一步。返回Step 2。
Step 6:如果式(28)小于等于式(27)且大于式(26),追踪列车以计划工况状态运行一步,返回Step 2;否则跳到Step 7。
Step 7:如果式(28)小于等于式(26)且大于式(25),追踪列车以惰行工况运行一步,返回Step 2;否则跳到Step 8。
Step 8:如果式(28)小于等于式(26),追踪列车以制动工况运行一步,返回Step 2。
Step 9:追踪列车不受干扰,调用单列车人工蜂群算法,从当前位置到终点站,以当前速度为初值重新计算列车工况改变点,完成剩余列车运行,算法结束。
3 实例验证及分析
3.1 实验数据
本文为验证模型与算法的可靠性设计了A 站到B 站的线路,并采用CRH3-350 型动车组(4M4T),其参数如下:
列车长200 m;满载重380 000 kg;牵引功率:8 800 kW。
其牵引力计算公式为:

其基本阻力计算公式为:

其制动力的计算公式为:
所涉及的线路具体数据如图1 所示,从A 站到B 站共45.380 km,列车最高时速为250 km/h。曲线起点为[800,8 540,15 640,22 415,28 440,37 440]。

图1 A站至B站坡度及曲线分布Fig.1 Gradient and curve distribution from station A to station B
3.2 算例结果
3.2.1 单列车运行结果与分析
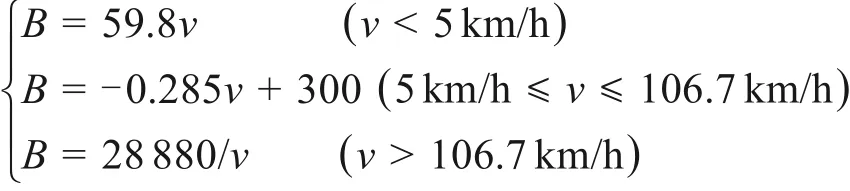
本节采用上述单列车节能优化模型来模拟上述线路的单列车运行情况。输入参数为:列车采用最短时间策略运行时,其工况序列以及对应的改变点位置序列为[[2, 1, 0, −1, 0, 1, 2, 1, 0, −1] [0,658 2, 17 550, 17 600, 19 950, 20 000, 21 000, 25 140, 40 687, 40 738]],其速度位置曲线如图2,由此计算出列车在上述算例运行时间为797.42 s,取798 s。由文献[14]可知实际运行时间为最短运行时间的1.05~1.15 倍。因此取870 s。距离允许误差值为0.25 m,即在此值内可认为列车满足了精确停车要求[15];时间允许误差值为30 s,即在此值内可认为列车满足了准点停车要求;罚项系数为50 000;回转质量系数γ=0.1;设置改进后的人工蜂群算法迭代次数[13]为100代,初始种群规模为50代,交叉概率为0.3。在Python3.7 编程环境下运行,求解出的其工况序列以及对应的改变点位置序列为[[2, 1, 0, 2, 1, 0, −1] [0, 658 2, 7 016, 21 782,24 248,25 565,43 949]],优化的列车运行速度曲线和运行结果分别如图4和表4所示。
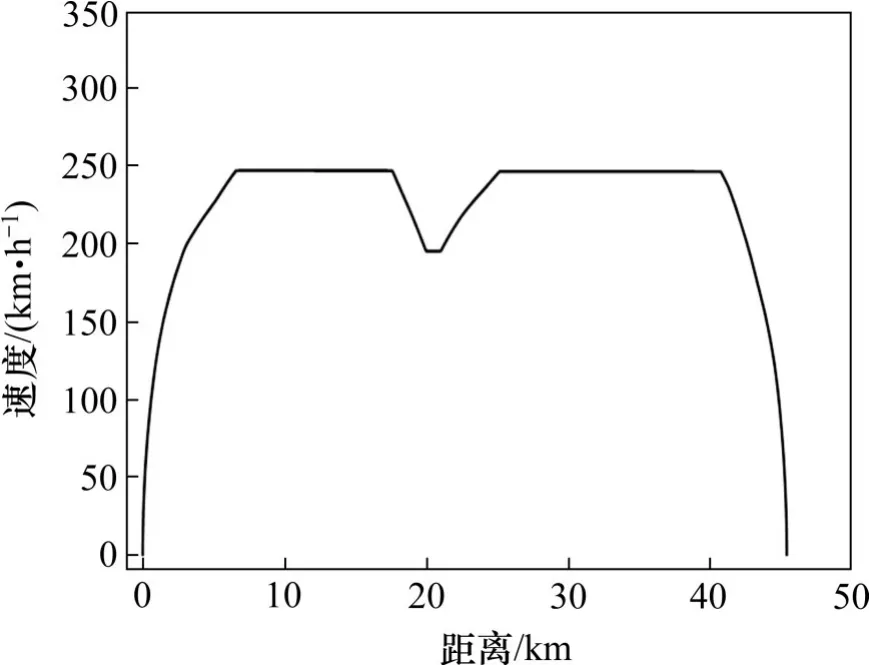
图2 最短时间策略速度曲线Fig.2 Speed curve of the shortest time strategy
得出以下结果:
图4 为列车运行速度-位移图,由于线路在20 000~21 000 m 之间存在速度为200 km/h 的限速区段,所以列车一直惰行到限速区段之后才开始加速。表4为列车运行结果,列车在整个过程运行时间为888.08 s,满足时间精确度要求,实现了准点停车;运行距离为45 379.85 m,比设定站间距离少了0.15 m,满足距离精确度要求,实现了精确停车。

表4 改进人工蜂群算法优化结果Table 4 Optimization results of improved artificial bee colony algorithm

图4 改进人工蜂群速度曲线Fig.4 Speed curve of improved artificial bee colony
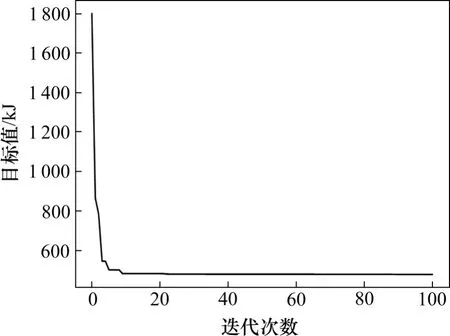
图3 改进的人工蜂群迭代图Fig.3 Improved artificial bee colony iteration diagram
3.2.2 单列车模型算法对比结果
本文设置简单人工蜂群算法与简单遗传算法进行对比,为了使对比准确,利用控制变量法设置参数。人工蜂群输入参数:罚项系数为50 000;迭代次数100 代;初始种群规模为50 代。遗传算法输入参数:罚项系数为50 000;迭代次数100代;初始种群规模为50 代;交叉概率0.6;变异概率0.03。其余参数均相同。则工况序列以及对应的改变点位置序列为:ABC-[[2, 1, 0, 2, 1, 0, −1] [0,518 2, 6 143, 22 310, 27 300, 29 004, 43 009]],GA-[[2,1,0,2,1,0,−1][0,566 9,6 809,25 314,30 163,32 067, 42 530]]。迭代图与速度曲线图如图5~8。与改进算法对比如表5所示。通过对比可得:本文设计的改进算法收敛更快;所求出的工况改变点位置更符合实际;其运行区间总能量消耗比最短时间策略节省了66.45%,比ABC 算法所得能耗节省了14.49%, 比GA 算法所得能耗节省了18.47%。

表5 改进算法与GA,ABC对比结果Table 5 Comparison results of improved algorithm with GA and ABC
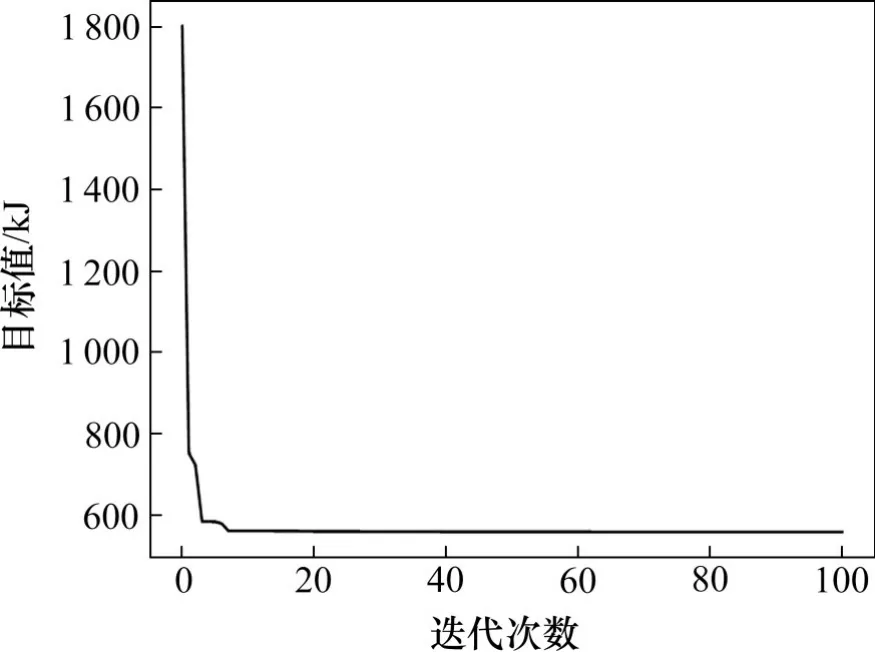
图5 人工蜂群迭代图Fig.5 Iterative diagram of artificial bee colony

图6 人工蜂群速度曲线Fig.6 Speed curve of artificial bee colony
3.2.3 追踪列车运行结果分析
由于本文研究追踪列车在受前车影响时工况以及能耗的变化,但在正常情况下各列车均以单列车工况运行,因此需假设在一定情况下后车将受前车影响:区间追踪间隔将减至80 s;追踪列车区间运行时间将减至870 s 内;500 m。利用追踪算法分别计算出前车使用改进人工蜂群算法求解的控制方案以及简单遗传算法求解的控制方案时追踪列车工况序列以及对应的改变点位置序列为:简单遗传算法[[2, 1, 0, −1, 0, 2,1, 0, −1, 0, −1, 0, −1, 0, −1] [0, 658 4, 8 015,15 432,15 561, 21 000, 25 376, 33 131, 40 543, 42 947, 43 437, 43 952, 44 276, 44 402, 45 167]],其距离为:45 379.79 m,时间为868.84 s,能耗为821.22 kW∙h;改进算法[[2,1,0,2,1,0,−1,0,−1,0,−1,0,−1][0, 658 2, 7 016, 21 000, 25 378, 33 129, 40 511, 42 949, 43 438, 43 951, 44 277, 44 401, 45 168]],由于前行列车的影响导致追踪列车工况由7个改变为13个,其运行时间为868.24 s,运行距离为45 379.99 m,耗能为784.51 kW⋅h,能耗小于前车为简单遗传算法求解控制方案下的列车追踪方案。其速度曲线如图9所示,虚线为改进人工蜂群求解下的前行列车速度曲线,实线为追踪列车速度曲线。追踪过程中实时列车间距如图11所示。
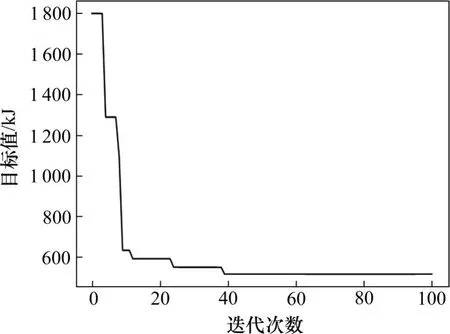
图7 遗传算法迭代图Fig.7 Iteration diagram of genetic algorithm

图8 遗传算法速度曲线Fig 8 Speed curve of genetic algorithm
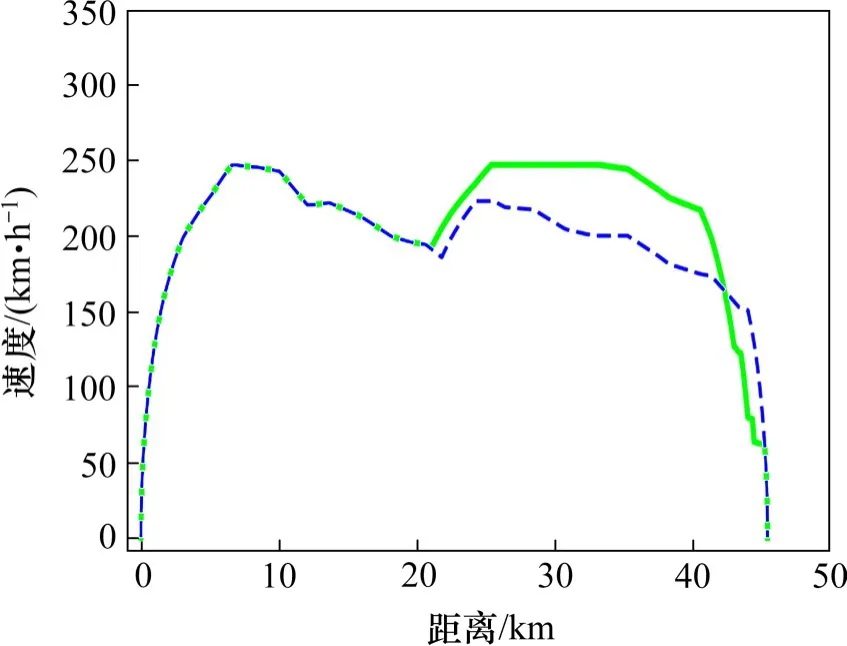
图9 追踪速度曲线Fig.9 Tracking speed curve

图10 追踪速度曲线三维图Fig.10 Three-dimensional diagram of tracking speed curve

图11 前后列车间距Fig.11 Distance between front and rear trains
由图9可知,在21 000 m 前由于限速和节能的约束使得追踪列车和前行列车运行曲线完全一致,在21 000 m 后为了保持合理行车间距,追踪列车开始加速追赶,在33 129 m 后进入理想追踪间距区间;因为追踪列车速度大于前行列车,逐渐小于理想间距,追踪列车减速;前行列车行驶到44 413 m时,进入制动阶段,速度急速减小,所以追踪列车为保持在理想间距区间,采用了3段“惰行—制动”工况策略,安全,准时,精确地完成行车过程。
4 结论
1) 建立了能耗最小的列车控制模型,针对模型与列车节能策略设计了一种改进的人工蜂群算法,在算法中采用迭代时全局最优解来引导算法方向从而增加了全局搜索能力的同时提高了收敛速度,并且借鉴遗传算法中的交叉操作来增强算法性能,极大地避免了算法陷入局部最优。
2) 考虑列车节能优化目标设计了追踪列车控制模型,并借鉴物理学中分子间引斥力现象设计了追踪算法。分子间凭借引斥力的存在始终保持分子间合理的距离,借鉴到列车追踪过程中使得追踪列车可以不断的调整相对位置从而减少列车区间追踪间隔时间,提升区间通过能力。
3) 将参数相同的程序迭代过程中所有罚函数值为0的工况改变点序列按照能耗从大到小依次排列可以发现,这些结果使得列车在相同站间的运行时间依次增加。因此,可为铁路行车调度工作提供决策支持,以寻求能耗与运行时间的平衡点。这也是作者继续研究的方向。
