柔性外骨骼机器人技术研究
2021-09-10吴嘉鑫韩亚丽柯泽阳朱熹微石微微孙文泽吴枫
吴嘉鑫 韩亚丽 柯泽阳 朱熹微 石微微 孙文泽 吴枫






关键词:可穿戴式;气动肌肉;柔性;腰部助力
0引言
当今社会,人口老龄化问题日益严重。近20年来,我国老年人口抚养比急速上升,由2000年的9.9%,很快增长到了2018年的13.7%。根据20世纪六十年代人口老龄化确定的划分标准,我国已经进入到了老龄化阶段。老龄化产业,尤其是福利机械用品方面,必然获得良好的发展前景。
据此,研究智能养老及福利机械用品,特别是针对行动不便的老人研究服务型机构意义重大。据了解,护工们普遍反映,在照顾老人的过程中,一些生活基础的动作,如翻身、移动帮助站立都会对护工们造成极大的体力负担。针对上述问题,着重研究可支援看护现场,应用于日常生活的穿戴式助力机器人,使得老年患者能够独自完成一些基本动作,减轻护工的工作负担。穿戴式助力机器人,可针对在老年群体中常见的因肢体偏瘫所导致的生活无法自理现象,主要表现在难以独自完成坐起、站起这样的生活基本动作。而穿戴式助力机器人可通过腰部助力的方式来弥补老年患者的肌力差,使其独自完成起坐动作。
本机构采用了弹性材料作为驱动型装置,利用气压驱动的轻柔性并且输出力大、穿戴方便等特点对使用者腰部动作进行助力,通过气泵充气然后利用弹性材料再拉伸来存储压缩力量,在人体恢复伸展过程中回馈提供助力。本文设计了关于柔性气压驱动器的可穿戴腰部助力机构,外骨骼机器人应用于老年病患者日常生活中的躺到坐、坐到直立等运动。
1项目研究分析
1.1人体腰部在不同运动模式下的运动功能需求分析
进行腰部在不同运动模式下的人体运动力学分析,例如躺到坐、坐到起等运动模式,获得腰部运动变化过程中腰部角度变化、背部主要肌肉群的受力变化等,给腰部助力外骨骼机构设计提供理论依据。
1.2以气动肌肉为动力腰部助力外骨骼机器人机构设计
进行腰部助力外骨骼机器人中所需的气动肌肉选型;进行腰部外骨骼机器人机构中的弹簧元件选型设计;进行气动肌肉及弹性元件的布置设计,并进行腰部机构的宽度可调设计研究。
1.3腰部助力外骨骼机器人的实验研究
进行腰部助力外骨骼样机的研制,通过腰部助力外骨骼的运动实验研究,研究腰部助力外骨骼样机对穿戴者运动的响应能力及助力的影响效果。
2腰部助力外骨骼机构
2.1机构设计
基于可穿戴式外骨骼柔性助力的特点,使用者容易穿戴在人体上并且轻便,机构在使用者躺着时提供腰部助力和拉力帮助其坐好,再由坐姿到站立时提供助力。图1所示为腰部助力外骨骼机构的设计。腰部助力机构的动力来源是由2种气压驱动器所组成,其中腰部腿部护具为基础,驱动器由伸长型气动人工肌肉组成,主要输出收缩力达到助力效果,气动肌肉提供的拉力在背部腰部腿部侧,其两端分别固定在背部腰部、臀部和腿部;还有腰部固定装置、腿部护具和臀部连接物件以及背部弹力带。去气泵需穿戴的整个装置质量约为3kg。
2.2气动肌肉
作为主要动力装置的气动人工肌肉,能以很小的重量提供很大的力量,气动肌肉有达到推拉极限时自动制动的特点,可以有效避免突破预定的范围,同时基于气压驱动器人机交互比较安全的特点,所以很适合作为穿戴类柔性气压的驱动器。
气动人工肌肉结构如图2所示。其主要是通过气泵进行充气的条件来实现各个部所需要的助力。此气动肌肉由内管、外套和两端部连接头所组成,本实验所用的橡胶管外径约为16mm,内径约14mm,厚度差2mm,自然状态下外网外径(不考虑内径)约为25mm,充气作用下外编织网外径会膨胀至35mm。内管的直径和长度根据用途来决定,其主要任务是接受气泵充气后膨胀产生弹性变形,同时储存弹性势能。为了具有优良的弹性内管材料,通常选用气密性硅橡胶管。外网套的作用是传递收缩力,同时限制内管的变形,所以选用柔性且具有高强度纤维编织网作为材料。通常外网套的长度是根据内管长度来决定,要长于橡胶管,留有连接头的空间。在肌肉两端,连接头的主要作用是把外网套与内管固定起来,封住内管的其中一端,同时向另一端提供充气孔。一旦气泵通人压缩空气后,保障内管可以弹性变形储存弹性势能,同时带动外网套收缩变形,从而产生助力。原理是由外部提供的压缩空气驱动,过程像是在作推拉动作,就像人体的肌肉运动。肌肉随着供给气压增大,收缩的长度越大。表现在通入压缩空气实现充气气压变大,然后膨胀,外网主动收缩,从而带动肌肉助力,收缩率高,这与人体生物肌肉模型特性极为相似,很适合柔性助力研究。在此实验用到的气动人工肌肉,在无外力作用时自然长度为330mm,气泵作用下供给气压为500kPa,长度最大变化量L=190mm,实现充气气压变大,然后膨胀实现主动收缩,从而带动肌肉助力,长度收缩率La/(L0+La)=190mm/520mm=36.5%。
通过使用测力仪器,研究分析在变化的供给气压力下,人工气动肌肉的输出助力与压缩位移的关系,其产生助力的弹性系数K,充气气压力p,提供助力F和肌肉长度变化量La之间的关系如下式所示:
充气使内管膨胀,内部气体压强变大,不同的气动压力对应不同斜率曲线,可以将气动人工肌肉类比于弹簧,将斜率看作变弹性系数。弹簧长度越长,对应系统的弹性势能越大,因而弹性势能所转换的输出力就越大。容易分析出助力机构输出力会跟着压力的变大而增大。
2.3助力输出机理
本助力装置主要是通过2个过程帮助人体达到从躺姿到站立的效果。在第一个从躺到坐的过程中需人体有要坐起来的身体幅度,此时由腰部连接到腿部的气动肌肉收缩开始工作,产生如图3所示的效果图,帮助人体达到坐姿。
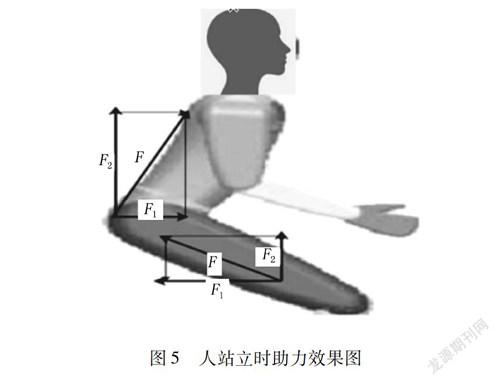
如图4所示,从各个过程分析,经过第一部分,助力人体可以过渡到站立的第二过程。此时腿部发力,臀部的气囊工作,提供一个向上的助力可以帮助人体开始进入第三过程,同时气动肌肉开始工作,腿部产生一个拉向臀部的力,同时帮助臀部前倾;还有背部气动肌肉开始工作,在腰部产生一个向上的力,如图5所示,同时弹力带开始工作,防止身体过于前倾。
从人体肌肉做功上分析助力的效果,与没有穿戴助力膝关节装置时相比,人体肌肉做功变少,肌肉的损耗也小。综上,可以帮助使用者站立。
3仿真及实验
研究气动肌肉的助力效果,通过使用相关的测力仪器,分析在变化的供给气压力下人工气动肌肉的输出助力与压缩位移特性曲线如图6所示。可以看出在工作初始状态p=500kPa时开始,使用者通过起身前倾,同时气动肌肉工作到达饱和状态,每根人工肌肉平均输出达20N,整个由6根气动肌肉组成的系统输出达到120N,从而实现提供使用者起身时的助力。当需要恢复人体站立姿态时,提供充足供给压力,单根的肌肉输出力最大为60N,理论上整个系统输出力可达到360N左右。
分析气动助力实验的结构,进行相关参数的研究,分析包括机构承受质量的大小和提供力大小以及自由度的數目。整个实验要求助力装置在理想工作状态下的实验相关参数如表1所示。
分析系统结构,整个机构大体分为2个重要组成部分,分别是腰部和背部,腰部回转、臀部、腿部关节末端位置确定,相关连接部位的调整。通过实验测试、气动助力装置测试和验证助力实验设备的相关工作情况来看,可以产生助力效果。
在实验过程中,气泵工作带动气动肌肉收缩可以为达到预期效果提供一个助力,帮助人体达到坐立的姿态。
4结束语
本文设计一种针对老年人日常生活助力腰部外骨骼机器人,通过对以人工气动肌肉为主要动力的腰部助力外骨骼机器人相关的柔性可穿戴式机构的设计研究,验证了对比于传统使用金属的气动人工肌肉,该柔性气压驱动器具有更高的收缩比,而且同时有相似生物肌肉的输出力特性,适合穿戴应用的柔性驱动要求,针对各个运动助力仿真过程,机构有助力功能,达到了辅助起身的效果。
