基于集成驱动的数字舵机控制器设计
2021-09-10王鸿睿梁柱马炎
王鸿睿 梁柱 马炎

摘要:针对国内电动舵机控制系统趋于数字化、集成化、小型化的需求,提出了一种基于集成驱动的数字舵机控制器的设计方法。采用了TI公司的TMS320F28335数字芯片和WBC02-30集成驱动芯片形成主回路。详细介绍了系统的组成原理、电路设计和控制方法。试验结果表明该系统具有良好的动态和稳态特性。
关键词:数字舵机控制器;TMS320F28335;小型化;集成驱动
引言
舵机是与控制系统的重要组成部分,也是与控制系统的执行机构。舵机按照所使用的能源来分类,通常可以分为气动舵机、液压舵机、电动舵机(electromechanical actuator,简称EMA)等[1]。
以DSP为核心的数字信号处理器的飞速发展使数字伺服控制器在电机控制领域得到广泛地应用[2]。随着数字伺服控制与数字化信息技术的发展,逐步向智能化、数字化和信息化方向发展,数字伺服控制器替代现有的模拟伺服控制器已成为的发展趋势[3]。
本文介绍一种基于集成驱动的数字舵机控制器,选用美国 TI 公司的 TMS320F28335 作为主控芯片,选用WBC02-30作为集成驱动器,配以相应的控制软件以解决现有航空电动舵机控制器不符合数字化、低成本、小型化、集成化的需求。
1 数字舵机控制器硬件电路设计
舵机控制器硬件电路主要包括:电平转换电路、DSP中央处理器单元、集成驱动器、422通讯电路、PWM产生电路、AD采样电路。
本设计方案采用了“比例微分控制”(PD控制)来提高舵机的动态性能[4]。比例控制的作用是瞬时减小偏差信号,微分控制的作用是能使偏差在变大之前引入一个早期的修正信号,加快系统动作速度,减少调节时间[5]。
1.1 电平转换电路
采用LM1117IMPX线性稳压器为TMS320F28335提供A3.3V和D3.3V电压[6]。采用AMS1117线性稳压器为TMS320F28335提供A1.9和D1.9V电压。
1.2 DSP中央处理单元
为满足产品的可靠性、高精度、高速采集的要求,中央处理单元采用处理器TMS320F28335。TMS320F28335是TI公司的一款用于控制的高性能、多功能、高性价比的32位CPU。
1.3集成驱动器
为了满足舵机控制器的集成化、小型化的需求,并具备良好的散热功能。选用了WBC02-30无刷直流电机驱动器。该集成驱动具备极限功率电源电压80V、最大输出电流30A、全部的桥臂控制电路、霍尔信号解码电路。可以直接使用数字信号实现转速控制与正反转控制,便于实现数字隔离控制。该电路具有禁止功能和限流保护功能。
1.4 数据通信电路
舵机控制器接受指令为异步RS422通信方式,TMS320F28335內部集成串行通信接口(SCI),只需通过适当的总线驱动器即可实现异步422通信。总线驱动器选用MAX490ESE芯片。
1.5 PWM产生电路
舵机控制器输出4路PWM和4路GPIO分别控制解锁电路和4路舵机伺服机构。舵机控制器PWM和GPIO输出由处理器TMS320F28335内嵌的PWM模块和通用GPIO实现[9]。
1.6 AD采样电路
为了满足AD采样电路的电平要求,采用OP4177运算放大器将4路舵机反馈电压进行调理,将调理后的信号经AD7656BST芯片进行转换输出到TMS320F28335的SPI接口。AD7656BST芯片具有6个独立的ADC通道,双极性模拟量输入,并具备6通道的同步转换功能,最高吞吐量可达250KSPS。
2 软件设计
2.1控制算法
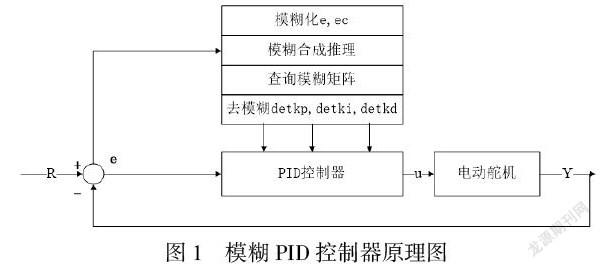
由于舵系统受工艺、制造水平以及飞行负载的影响,具有较强的非线性和强耦合特点,同时动态指标要求不断提高,因此舵系统控制难度大、控制算法设计及控制参数调节是舵系统研制的共用关键技术之一。模糊控制不依赖于被研究对象的精确数学模型,对于系统动态响应有较好的鲁棒性和适应性,将模糊控制思想引入传统的PID控制中,根据误差及误差变化率建立模糊规则表,具有实现方法简易、易于工程化实现的特点[6]。
模糊PID控制器的原理图如图1所示。
3 实验结果
经上述原理进行了集成驱动数字舵机控制器的硬件和软件系统设计。将数字舵机控制器与舵机联试,测试结果如图2所示。
由图可知集成驱动数字舵机控制器具有超调小,调节时间短,速度高等优点,满足了电动舵机控制系统预期指标要求。
4 结论
系统采用TI公司DSP芯片TMS320F28335和集成驱动器WBC02-30来完成的舵机控制系统设计。该电路设计具备了调试简单,高可靠等优点,解决了现有电动舵机控制器不符合数字化、低成本、小型化、集成化问题。采用了比例微分的控制方法,得到了较好的控制效果。
参考文献
[1]王海军,一种直流永磁无刷电机及控制器的监测系统[J]. 水雷战与舰船防护,2015,23(1):17-18.
[2]汪军林,解付强,刘玉浩.电动舵机的研究现状及发展趋势.控制与.2008(3):42-46
[3 ]叶金虎.现代无刷直流永磁电动机的原理和设计. 辞学出版社,2007.
[4 ]张琛. 直流无刷电机原理及应用[M].北京:机械工业出版社,2004.
[5]刘金琨,先进PID控制MATLABA仿真[M]. 北京:电子工业出版社,2007:1-6
[6]张海涛,林辉.高精度机电伺服控制系统[J].微特电机,2007,35(2):35—37.
