某硬派运动型多用途车型智能四驱全地形系统的设计开发研究
2021-09-10周长波姜中望
周长波 姜中望



智能四驱全地形系统是汽车智能化、集成化发展的产物。通过将经验成熟的安全驾驶习惯在各系统集成控制中实现,帮助用户在不同地形环境下安全平稳驾驶并获得较好的操控体验。提出1种以智能开关为主逻辑控制,电子稳定系统作为主执行机构的全地形四驱系统。智能开关对车辆各个系统进行模式切换指令发出、模式状态确认等逻辑控制。该技术方案架构简单、成本低,且能够快速移植到已量产车型中。此外,该系统还针对跨岩石模式切换容易卡滞导致的分动器打齿问题进行了设计保护。从用户实际使用场景角度出发,阐述全地形系统标定的核心问题,并对标定过程中的客观参数及主观评价指标作了描述分析。
智能开关;全地形;四驱;系统标定
0 前言
国内经济的飞速发展極大地提高了国民的生活水平。全尺寸的运动型多用途车型(SUV)越来越受到普通用户的青睐。然而,对于大部分普通用户而言,户外越野驾驶经验相对缺乏,如何在保证安全的情况下让更多用户享受越野驾驶带来的乐趣是硬派SUV研发厂商需要着重解决的问题。全地形系统(ATS)在此背景下应运而生。
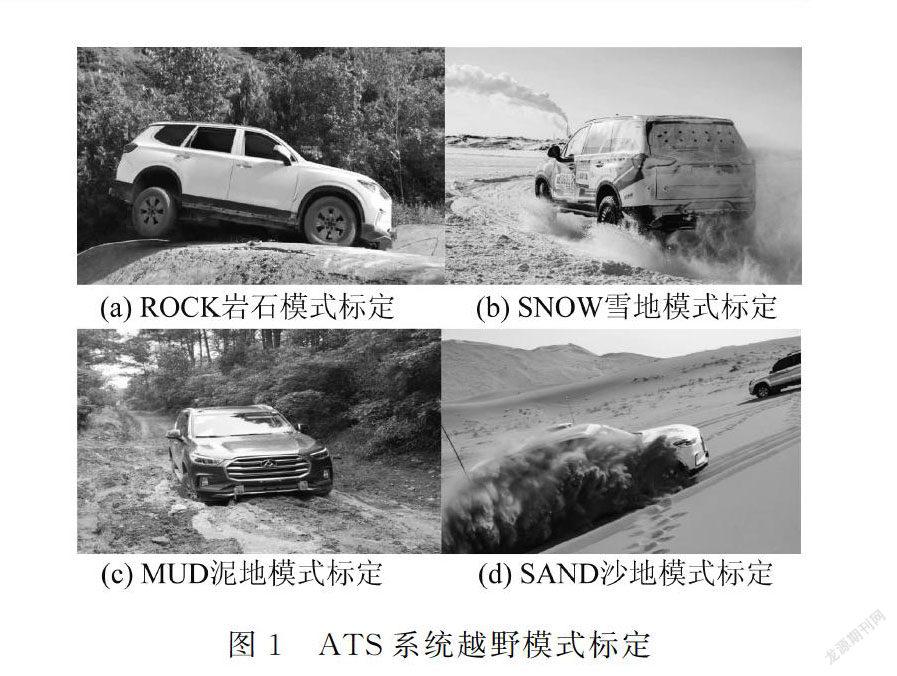
ATS系统设计有多种地形模式,用户可以根据不同地形及环境选择相应的地形驾驶模式。常见地形模式有岩石(ROCK)、雪地(SNOW)、泥地(MUD)、沙地(SAND)等,如图1所示。系统会根据驾驶员所选择的模式进行匹配,将有效、正确的驾驶习惯预设在系统中,帮助用户做出正确驾驶动作及车辆响应。国内外同类车型ATS系统的控制大多数集中在车身控制器或单独的控制器中。电子控制器的增加不仅会增加系统故障的概率,并且对于普通的ATS系统控制,控制器所做的仅是简单的信号交互及逻辑判断,因此无须单独设计开发专用控制器来执行此类系统操作[1-3]。
1 研究内容及重点
本文研究提出了1种基于集成式智能模式开关(IITMS)的全地形控制系统设计方案,以集成式模式切换开关为核心,完成全地形系统的切换控制。同时,车身电子稳定系统(ESP)作为车辆动力学触发控制大脑,实现对车辆姿态的调整等控制要求。本文还对ATS系统标定进行了研究分析,突出系统在标定过程中所须解决的核心问题,以获得较好的系统性能表现。
2 智能四驱全地形系统的设计及标定开发
2.1 系统的设计开发
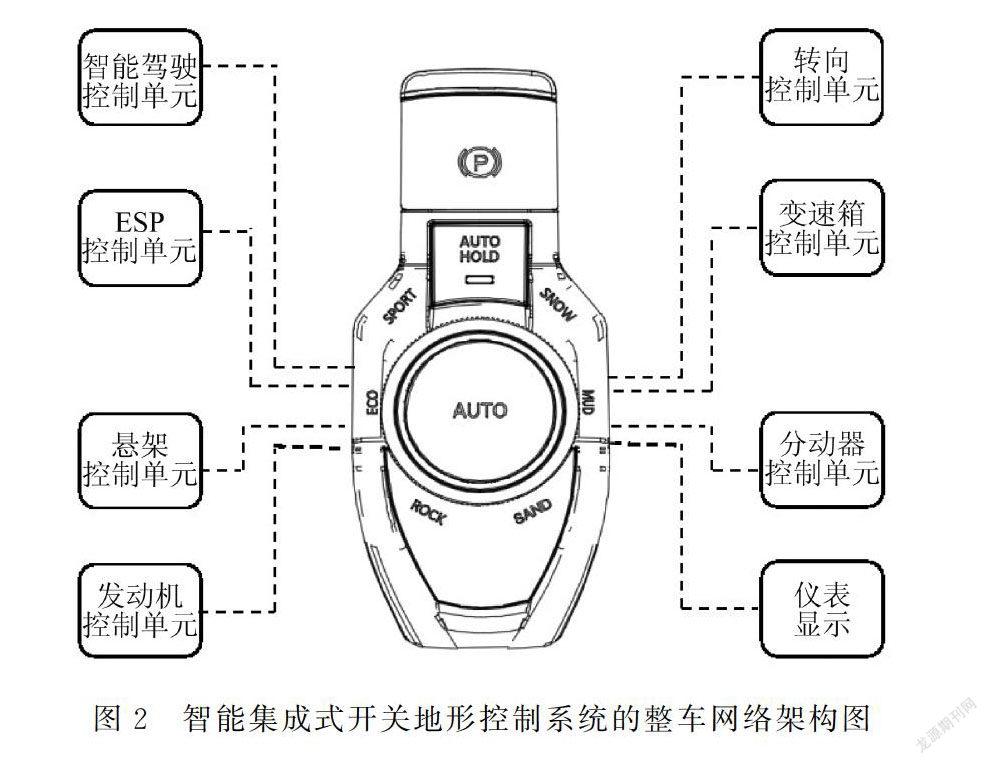
智能开关的外观设计及全地形控制策略的整车通讯架构如图2所示。IITMS作为全地形系统控制的“大脑”,布置有7种地形模式的背光提示系统,通过内部互联网络(LIN)的连接方式与发动机控制单元(EMS)、分动器控制单元(TCCU)、ESP控制单元等控制器进行通讯交互。用户通过开关旋钮选择指定模式,IITMS根据用户选择的模式向外发出模式切换指令,各执行单元根据收到的切换指令按照内部设定的映射关系进行转换(表1),并同时向控制器域网(CAN)广播当前切换状态(由网关进行LIN与CAN的通讯转换)。IITMS实时监控总线信号,跟踪模式切换过程,并通过仪表向用户显示模式切换提醒、切换故障、切换成功等信息。
*由于篇幅及保密等原因,所有交互映射关系无法给出,本表仅做示例用。其中电动辅助转向(EPS)有轻(LIGHT)、适中(NORMAL)、重(HEAVY)等模式;自动变速箱控制单元(TCU)有正常(NORMAL)、低速档(LOW RANGE)、运动档(SPORT)等模式;TCCU有高速四驱(4H)、低速四驱(4L)、自动(AUTO)等模式。
如图3所示,具体完整的IITMS控制策略有以下4种逻辑控制。
(1)模式切换逻辑控制
在正常的模式切换控制中,首先由用户选择地形模式。为防止用户误操作或旋动旋钮娱乐造成的非正常切换意图的误判,IITMS在确认请求时会进行200 ms的动作过滤。在正式请求确认后,IITMS根据选择的模式判定切换条件是否满足,如切入切出ROCK模式时,用户须停车挂N档;在SAND等越野模式切换时,需要车速在80 km/h以下等。如果切换条件不满足实际情况,IITMS会向仪表发送信号,提醒用户正确完成相关切换操作。待切换条件满足后,IITMS会向CAN总线发出正式模式切换请求。各控制单元在收到IITMS发出切换请求后,按照前期设计映射的对应关系进行切换,并在下1帧信号回复当前响应状态。在发出模式切换请求信号的同时,IITMS内部时钟计时器开始启动,对于除ROCK相关的模式外,计时器设置为3 s,针对ROCK模式的切入与切出,则设置14 s的计时。这是由于ROCK模式的切入与切出可能会出现卡滞现象,因此切换的时间较长,同时也可以规避跨ROCK模式切换所带来的切换超时问题。
IITMS在收到各执行单元发回的响应模式确认及响应信号后,如各单元模式响应正确则计时器停止计时,同时向仪表发出切换成功显示及模式常显提醒。若切换过程超过规定切换时间(3 s或14 s),IITMS则向仪表发送切换失败信息,并提醒用户再次尝试切换,同时返回用户切换前的地形模式。
IITMS支持无条件打断切换(除ROCK相关模式外),即在模式切换过程中,如用户选择另外的模式,则系统停止当前切换并按用户新选择的模式重新进行切换。但在跨ROCK模式切换(满足切换条件)时,或正处于ROCK模式切入与切出时,则系统必须将当前模式切换执行完毕后再执行新的模式切换请求。
(2)开机初始化
本研究设计的IITMS具有断电记忆机制,即在车辆熄火断电后将当前模式储存记忆,再次点火上电后如果断电前为ROCK模式,则向外发出ROCK模式请求,其余均默认发出AUTO模式请求。这一功能设计能够避免用户在实际越野驾驶过程中由于突然断电或被迫重新点火等操作反复进行切换地形模式,从而提升用户体验,并满足在紧急情况下的实际驾驶操作需求。
(3)故障诊断及报警
IITMS通过CAN总线实时监控系统中各子控制单元的故障状态,如在车辆运行过程中任一子节点发出故障信号,则IITMS根据内部存储的故障代码进行故障等级识别并存储记录。如果故障属于I级故障,则IITMS向仪表发出点亮故障灯请求,不影响系统功能的故障则不作提醒处理。在车辆发生故障时,系统进入故障模式,但仍保持正常响应,并周期监控总线信号,待子节点故障消除后,系统自动恢复。
(4)背光顯示策略
IITMS设计带有背光显示灯光提示。在当前模式下,当前地形模式对应的背光灯常亮,其余灯光保持熄灭。在模式切换过程中,当前模式常亮,目标地形模式灯以0.5 Hz闪烁。待切换成功后,目标模式背光灯则常亮显示。在开机初始化自检中,背光显示全部常亮,自检结束后按正常模式进行显示。在系统发生故障时,所有背光灯熄灭。
2.2 ATS系统标定
ATS系统架构设计是系统的主要组成部分,各地形模式的标定对系统表现同样至关重要。优异的标定策略不仅能够保证车辆行驶的安全性,同时也能够发挥整车最佳性能。本文由于篇幅限制,对该系统标定不作深入阐述,仅以典型的ROCK模式及SAND模式中的部分标定问题作简要阐述。
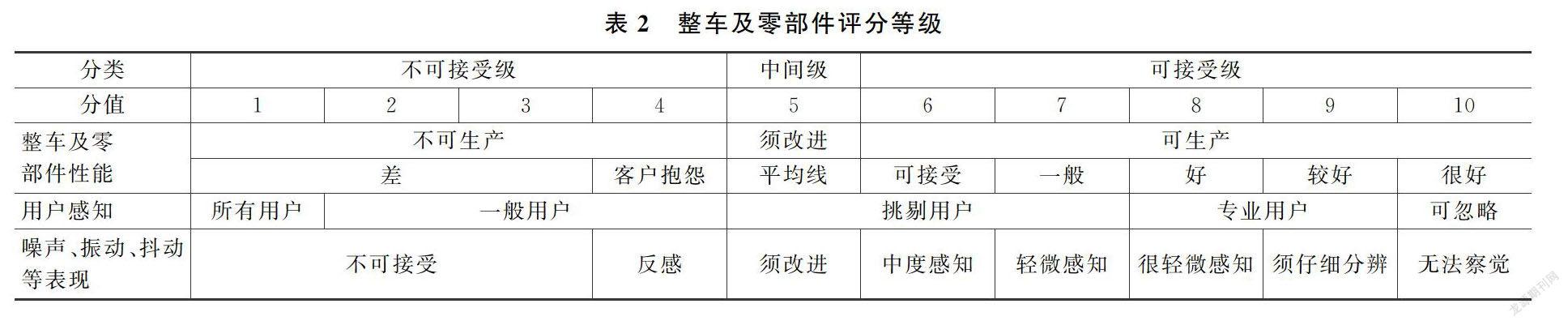
ATS系统标定主要由客观指标及主观评价组成。客观指标以系统计算车辆动力学模型参数为主,ESP系统对整车四轮转速 n 、横摆角速度 γ 、车速 v 、车辆转向角 δ 、车辆侧倾角 φ 、车辆滑移率 s 等参数进行实时监控,通过计算分析得出在当前地形模式下整车姿态的最优解,对发动机扭矩控制、分动器控制等控制单元发出计算结果要求响应跟随,并对不同车轮进行施压制动控制。具体的动力学模型控制不属于本文研究范畴,故不作赘述。主观评价主要通过经验丰富的极限驾驶人员进行评测。表2是通常采用的主观评分等级分类。表3是在标定过程中驾驶评价指标的参考示例。车辆动力学模型分析得出的客观数据结果往往能够应对大部分地形环境,但无法将舒适性等主观评价指标在模型中精准体现。以ROCK模式标定为例,在通过大交叉轴越野路面时,ATS系统介入时机准确但制动强度过大,这将导致车辆在大交叉轴路面会突然向前加速,车身姿态将出现大幅度摇摆,这在户外越野中是极不安全的。因此,测试工程师将根据自身极限驾驶经验,通过调整人工介入时制动强度等预加载操作,实现介入时机准确且平缓越过障碍区的安全驾驶,增强用户对该地形模式的驾驶信心。
而在SAND模式驾驶方面,用户对于动力响应要求较高,车身姿态调整则与常规动力学模型控制完全不同。目前,国内外尚无专门应对沙地地形的ATS系统动力学模型,因此在标定开发工作中,需要基于主观评价情况,进一步修正动力学模型参数、弱化部分控制参数,以获得较好的沙地操控性能。
3 结论
综上所述,本文所研究的ATS系统将所有地形模式的切换都集成在同一开关下实现,具有架构简单,成本低,用户操作方便等优点。在目前实践应用的上海汽车某SUV车型中,ATS系统具有良好的效果,受到广大用户的青睐,获得了较好的产业化应用价值。同时,该设计方案对目前的整车电子架构有着较好的适应性,可在其他量产车型中快速推广应用。
4 展望
当前,ATS地形模式切换仍以人工手动切换为主,少数车型可根据轮胎滑转情况自动识别地形并切换,但都存在一定的局限性。随着人工智能的发展,未来越野车型的ATS系统将日渐成熟并智能化,基于图像识别技术的ATS系统将实现精准的自动切换,同时车辆集成控制程度将进一步提升。ATS系统在各种地形模式下的操控性将更加精准[4-5]。
[1]张博, 苏建宽, 李亮成, 等.车辆雪地地形模式自动识别方法及装置[P]. CN109263643A, 2019.
[2]周申光, 牛小锋, 孙玉, 等. 汽车的全地形控制方法和系统[P]. CN108657182A, 2018.
[3]BIN L, AVESTA G, AMIR K, et al. An optimal torque distribution control strategy for four-independent wheel drive electric vehicles, vehicle system dynamics[J]. Vehicle Mechanics and Mobility, 2015,53(8):1172-1189.
[4]刘福帅. 基于视觉的移动机器人室外地形识别[D]. 山东大学, 2017.
[5]ALEX K, ILYA S, GEOFFREY E H. Imagenet classification with deep convolutional neural networks[D]. University of Toronto,2012.