自动驾驶的关键技术——激光雷达(LiDAR)的基础技术、最新动态及车载技术的必要条件
2021-09-10陣鎌真一
陣鎌真一





Macnica公司正在涉足自动驾驶系统相关的技术。其中1个特色技术是激光雷达(LiDAR)。此技术是自动驾驶的关键技术。论述如激光、光束转向等LiDAR的基础技术,介绍感兴趣区域(ROI)、计算机视觉等最新技术动态,以及有待解决的问题。
电子控制;毫米波雷达;激光雷达;整车传感器
0 前言
Macnica公司是1家半导体贸易公司。近年来,Macnica公司在自有的macnica.ai品牌旗下,积极投身于人工智能(AI)技术的开发,并开展了针对专业业务的咨询服务,涉足了新的领域。Macnica公司的移动解决方案事业部,不但自主开发了与自动驾驶相关的产品业务,目前也在自行开发自动驾驶的软件(图1)。
近期,Macnica公司相关研究人员参与策划了奈良县平城宫迹历史公园的自动驾驶活动,并且在茨城县境町组织开展了针对自动驾驶客车的运行业务。这些活动不仅可以验证由Macnica公司研究开发的自动驾驶技术,也可通过这些商业活动为社会作出贡献(图2)。
Macnica公司研究人员一直在探索激光雷达(LiDAR)等与自动驾驶相关的传感器的最新技术。雷达用电波来探测物体并测量距离,而LiDAR则用激光来实现这些功能(图3)。
本文将重点介绍LiDAR的基本结构、性能、最新功能及实现车载的必要条件。
1 自动驾驶车辆的核心传感器—LiDAR
1.1 在自动驾驶车辆上应用的传感器群
为实现自动驾驶技术,研究人员为车辆选用了各种各样的传感器。目前,研究人员已经在先进驾驶辅助系统(ADAS)上应用了前视雷达、立体摄像头和周围监控雷达,还应用了配备有AI技术的前视摄像头等各种传感器。尽管传感器的种类较多,但是LiDAR还是被誉为自动驾驶的核心传感器。这是因为在自动驾驶重要功能的实现途径上,需要对物体认知和自身位置进行推断。
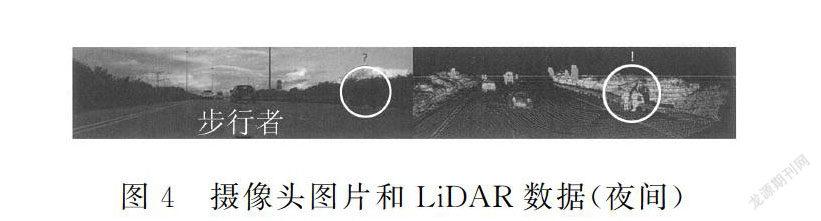
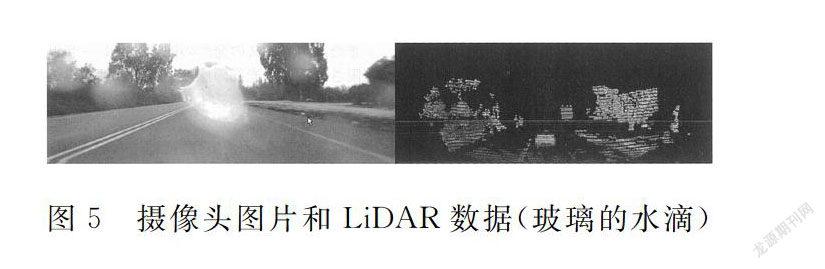
在周围监控技术上,摄像头+AI技术的图像认知技术发展异常迅速,但是光靠摄像头的影像无法准确测量出物体与车辆间的距离。当环境亮度较差时,摄像头将失效,也妨碍了对物体的探测。LiDAR可自行发射激光,即使在光线昏暗的环境下也能清晰地显示数据(图4)。另外,摄像头容易受到附着在镜头和玻璃上的水滴等异物影响,而LiDAR只要激光没有被完全遮挡,影响相对较小(图5)。
对车辆自身位置的推断方法有好几种,比如根据GPS信号来测量位置,或者用轮胎的转数来计算等。但当GPS信号较弱时,系统无法准确测定车辆位置,轮胎打滑累积误差等问题的存在也会影响计算。相反,根据LiDAR来断定车辆自身位置,通过对比高清地图和LiDAR获取的地图,就可以精确地推断出自身的位置。正因如此,LiDAR被誉为自动驾驶车辆的核心传感器。
1.2 点云
用LiDAR获取的信息,被称为“点云”。用放映器来看,形成摄像头的图片,实际上是测量多点来获取坐标的数据,进而在放映器上显示出来,因此研究人员可以从正面、侧面等不同视角来进行观测。另外,研究人员还可以根据不同的距离和不同的高度,将点云区分颜色。研究人员甚至可以根据LiDAR含有不同反射率的信息来划分点云颜色。比如,由于沥青和道路白线的反射率不同,研究人员可探测到车道和左转右转车道的箭头标识。
1.3 旋转型和固体电路型
LiDAR有很多种分类方式,最容易区分的是旋转型和非旋转型。旋转型也称为机械式,是搭载了多个激光模块并使其旋转的方式。非旋转型也称固体电路型,是通过光束转向来实现激光扫描的方式。旋转型的优势是可以安装在车辆顶盖的高位上,1台设备就可以环视车辆周围360 °的景象,但这不符合乘用车的造型设计。也有研究指出旋转部分会造成车辆振动和冲击的耐久性变差,并不适合在量产车上应用。基于该原因,固体电路型的LiDAR成为了各家公司竞相开发的对象。
2 基本的组成要素和常规的性能指标
2.1 激光发射单元和接收单元
激光是使用波长905 nm或1 550 nm的红外线。一般前者使用硅半导体,后者使用化合物半导体。硅半导体在价格和电量消耗方面是有利的,但是1 550 nm的波段对人眼影响小,因此输出功率更容易提高。而且太阳光中包含的成分比其他的波长段更低,所以不容易受太阳光的影响。
激光接收单元虽然使用了光电二极管、单光子雪崩二极管(SPAD)等元件,但是905 nm的波段可以用硅半导体来制作,因此价格低廉且电量消耗少。
2.2 光束转向方式
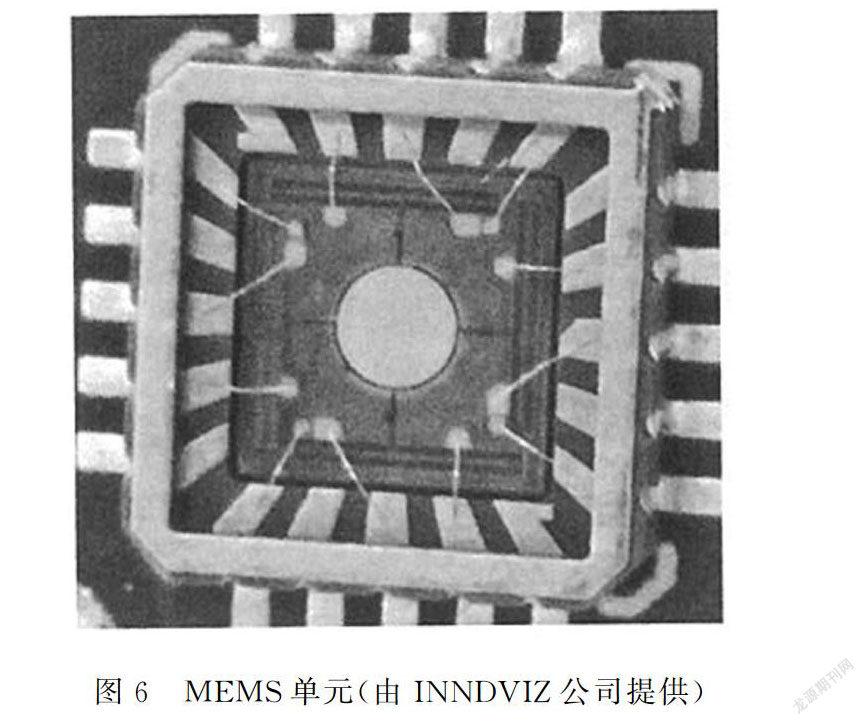
各个公司所采用的光束转向,也就是激光的扫描方式各不相同。比如二维(2D)微机电系统(MEMS)的方式是在镜子上搭载2轴可动元件,通过激光向该处反射来实现光栅扫描(图6)。还有些公司采用的方式是让小型镜子旋转来改变激光的波长,并投射到棱镜上,通过折射来实现扫描。
2.3 测距方式
常规的测距方式是采用脉冲时差法(TOF)的方式。有几家公司正在打算采用调频连续波(FMCW)的方式,目前该技术还在开发中。脉冲TOF方式,是在一定间隔下发射激光,测量该反射波抵达所需要的时间,进而计算出距离的方式。而FMCW方式则是雷达上普遍使用的方式,一边调制频率一边连续照射,测量该反射波抵达所需要的时间。FMCW方式相对TOF方式最大的差異是通过测量多普勒效应下反射波的波长变化,计算出与对象物体的相对速度。
2.4 探测距离
最大探测距离是物体探测中非常重要的性能。增加激光的输出功率可以延长最大探测距离,但是为了抑制对人眼的影响,系统要求探测达到IEC 60825-1 Class1的级别,而且装置的发热问题也限制了激光的输出功率。提高激光接收部的灵敏度也可以延长探测距离,但是容易混入背景噪声。因此,噪声过滤技术的差异即导致激光雷达性能的差异。
最小探测距离也很重要,但是很难平衡最大探测距离和最小探测距离。研究人员需要在信号强度强的地方和弱的地方,在模拟/数字(A/D)转换的动态范围切换等方面下功夫。
2.5 视野角度(FOV)
FOV指的是能够环视的最大范围。旋转型头部可发射多束激光,能够获得宽阔的视野角度。相比而言,固体电路型的光束转向有限,一般视野角度狭小。目前,该设备可搭载多个MEMS,实现了120 °的广阔视角。
在垂直方向的视角方面,旋转型LiDAR取决于激光的束数,固体电路型LiDAR取决于光束能够实现的转向角度,但是视角一般都在20~40 °左右。对车载用途而言,这样的范围是足够的,但从安全等周边监控用途来看的话,用户还是趋向于更广阔的视角。
2.6 解析度/分辨率
LiDAR的解析度越高越精细,但是1 s内能够处理的能力是有限的,因此FOV和帧率很难兼顾,需要折中选择。分辨率也是经常用来表示性能的指标。这是因为作为点云的密度容易进行对比,而且便于计算某个距离的物体能否被探测到。
2.7 帧率/周期
帧率和摄像头图片一样用每秒传输帧数(fps)来表示,展示的是1 s能够更新的帧数。帧率也可用周期(单位Hz)来表示。不管哪种表示,原理都相同。目前,LiDAR上普遍采用了10~30 fps的配置,但是考虑到公路上车辆的高速移动,则必须达到30 fps左右。
3 与自动驾驶相关的最新技术
3.1 变更垂直视野
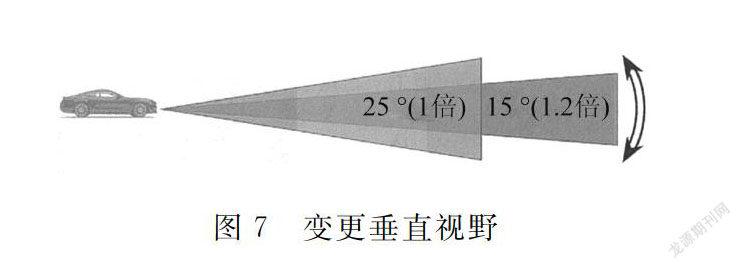
MEMS方式和棱镜方式的LiDAR可以动态变更垂直视野(图7)。这里有2类使用方法可供考虑。第1类方法是将视角调小,相应地提高激光输出功率,这样可以延长探测距离。第2类方法是解析度不变,将视角调小,提高分辨率,这样能够探测到更远的小物体。不管哪种方法,都是为了满足在一般道路上视野开阔,以及在高速公路上视野虽狭窄但更容易看到远方的需求。调成狭小的视野可以上下移动,所以研究人员也可以在坡道的顶部将视野调成朝下,在谷底部将视野调成朝上。
3.2 感兴趣区域(ROI)
ROI通過提高视野内指定范围的激光输出功率来延长探测距离,或者通过细化分辨率来提高物体的探测能力。比如在INNOVIZ公司的INNOVIZOne上,研究人员将整体视角的激光输出功率按75%来定义,ROI部分(视野中央的水平方向20 °和垂直方向8 °的区域)的激光输出功率按170%来定义,在整体视野上能够获取一般解析度的点云数据,在ROI部分能够实现更远的探测距离(图8)。
3.3 像素加法
将多个像素编成组,并当作1个像素来对待,这种方法更容易捕捉到微弱的信号。在远方的物体或者反射率小的物体,反射波的强度小,信号会被淹没在背景噪声中。但是在多个像素的反射信号相加后,可以提高信号/噪声(S/N)比。这样,在远方的物体或反射率小的物体也可以被探测到(图9)。研究人员追加了指定像素组的计算,正常的视角及解析度的点云数据仍维持原样,这样能够补充输出像素相加的结果。但是,像素相加得到的点云数据,解析度和距离精度会下降,相应的数据波段和处理器的负荷会上升,所以研究人员在设计时需要考虑到这个因素。
3.4 计算机视觉
LiDAR输出的点云信息,原始状态是由多个点组成的坐标数据,而用于自动驾驶则需要作为点的集合来处理,去感知该物体是什么。为了更具体地阐明该问题,本文对INNOVIZ公司提供的INNOVIZ Sense的后期信息处理软件进行了分析。
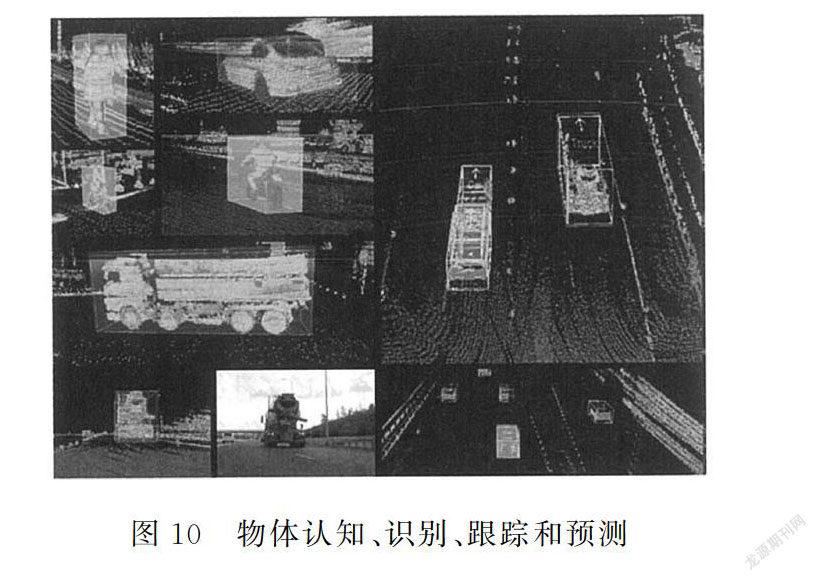
(1) 物体认知。物体认知功能实际上是进行物体的认知、识别、跟踪和预测处理的一整套完整过程(图10)。首先是在单帧上识别物体种类的单体探测,在多帧上计算运动的方向、速度等移动信息。然后进一步将这2个探测器的信息进行组合,进行跟踪和预测。随后,对乘用车、重型车、摩托车、自行车、行人及其他信息进行识别,并将这些信息与物体意义唯一的身份标识号(ID)进行绑定,发送给上游的电子控制单元(ECU)。
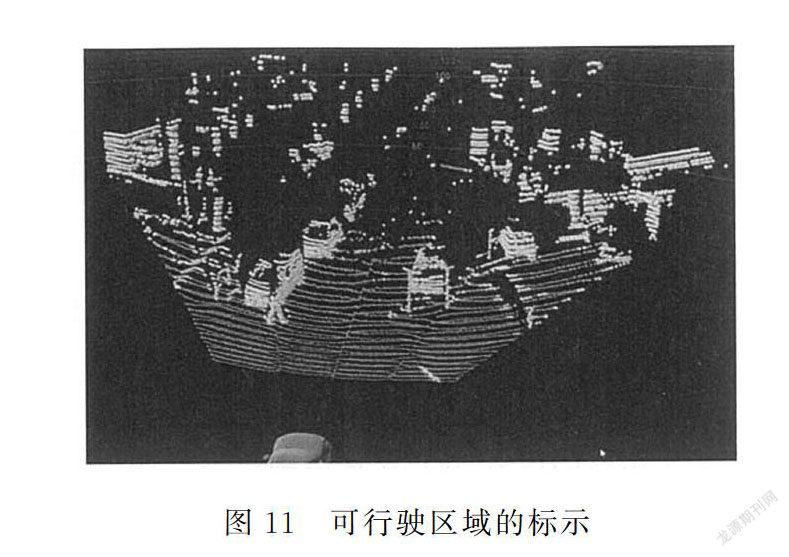
(2) 可行驶区域。自动驾驶L4及以上要求系统承担行驶的操作。系统需要识别可行驶的区域和可泊车的区域。在INNOVIZ Sense中,研究人员在每帧上将点云上的多个点划分成可能会发生碰撞,以及与碰撞无关2个级别。在归类为可能发生碰撞的点云中,继续划分为物体和障碍物。归类为与碰撞无关的点云,包含了平坦的地面、高度可越过的物体、可从下方通过的物体和点云背景噪声。和物体认知一样,这些信息也被发送至上游ECU(图11)。
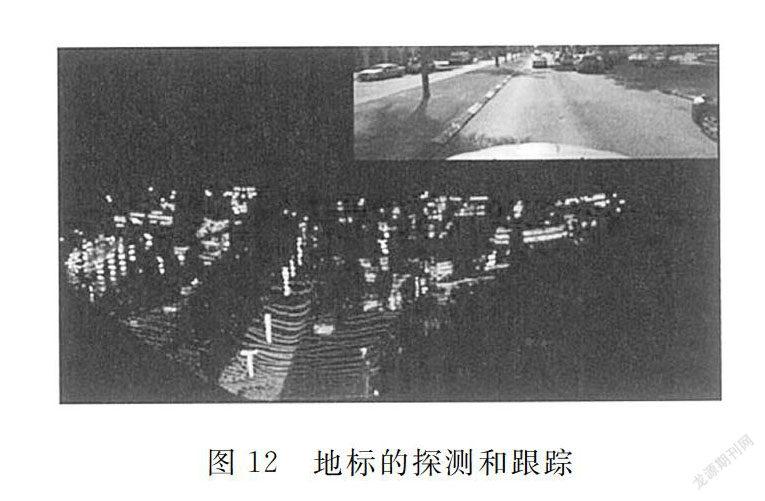
(3) 地面标记的检测和跟踪。如上文所述,自动驾驶的车辆在地图上哪个位置行驶,需要正确察觉并推断出自己的位置。与地图的匹配,是指结合地图上特征性的地标和行驶过程中获得的LiDAR信息的地标,来推断本车的位置(图12)。这项功能是探测和跟踪特征性的地标,如电线杆等垂直物体,护栏、桥梁等水平物体,以及标识等较大的平面物体,并将上述信息发送给上游的ECU。
如此,LiDAR将行驶区域内存在的物体,以及可行驶的区域、地标等信息提供给上游ECU,进而实现自动驾驶过程所需要的障碍物规避和路径生成的功能。
(4) 标定。考虑到量产车的应用,相关标定功能同样也必不可少。这个功能是探测出放在指定位置的目标,将传感器的安装位置自动进行原点修正。
而且,在行驶中也会面临加载状态、悬挂、轮胎胎压、车身高度和倾斜度等参数出现动态变化的情况。此功能可修正这些参数。
4 总结
4.1 尺寸、质量及成本
LiDAR虽然有无与伦比的性能,但是与雷达和摄像头相比,在尺寸、质量及成本上还是有很大的劣势。LiDAR有很多子零件,随着销量的增加,成本会有一定程度的下降。今后,LiDAR技术将在激光器阵列的优化、激光的信号接收-信号处理一体化等方面作进一步提升,而零件的改进也会推动LiDAR实现小型化、轻量化及低成本化。
4.2 可靠性及品质
各汽车厂商都是以国际标准为基础进行可靠性试验,并作出对应改进。日本汽车厂商的可靠性试验规范在试验条件和判定标准方面普遍比国际标准更严格。
考虑到驾驶室外的安装,试验的工作温度范围是-40~85 ℃,壳体的防护等级和防水性要求达到了IP69K的级别。因为每个汽车厂商都有自己的LiDAR高压清洗试验规范,所以相关研究需要注意不同清洗试验规范的区别。在振动试验方面,相比一定频率的振动试验,汽车厂商指定波形的随机施加振动试验更容易出现问题。需要注意的是,冲击试验有100 G级别的试验加速度。
在温度和湿度方面,虽然热冲击试验要求很严苛,但是试验条件和判定标准各不相同,因此难以融入到设计阶段的考虑过程中。
在电磁干扰/电磁兼容(EMI/EMC)方面,相比上述物理性试验,参照国际标准执行的较多,更易于进行考量。
其他如功能安全和环境负荷物质要求等方面,在量产车上应用仍存在一定的困难,并非所有厂家都能在短期内攻克该难关。
5 展望
近年来,随着LiDAR性能和可靠性的进一步提升,逐渐达到了可以在整车上应用的水平。工程机械、农业机械、铁路、船舶、航空等领域,以及其他的机械领域对LiDAR均有着较高需求。目前,在日本国内部分城市的十字路口、道口、站台门等领域中,也开始使用LiDAR了。预计到2025年,日本国内的LiDAR市场规模将达到数千亿日元,其用途会越来越广泛。LiDAR一旦开始应用,将会像手机的摄像头那样实现小型化、高性能化和低成本化,其应用也会日益广泛。
[1]
[2]
[3]
[4]
[5]
[6]
[7]
[8]
[9]
[10]
[11]
[12]
宋显亮 译自 自動車技術,2020,74(10)
吴 玲 编辑
(收稿时间:2021-01-02)