柴油机多模式运行进气系统的模型预测控制
2021-09-10B.SHINY.CHIM.KIMP.DICKINSONJ.PEKARM.S.KO
B.SHIN Y.CHI M.KIM 【美】 P.DICKINSON J.PEKAR M.S.KO





模型预测控制(MPC)方法是1种基于系统的预测动态模型的控制方法。通过优化目标设置点的跟踪特性、执行器的移动速度及限值等各种要素,确定执行器的控制位置。目前,线性MPC已成功用于柴油机进气道的控制,然而大多数应用开发是针对仅有1组控制目标设置值的单一运行模式。实际上,单一运行模式并不能涵盖当前柴油机的所有要求,这使线性MPC的实际应用更为复杂。在多模式运行中,线性化点的变化取决于各种运行模式下的目标设定点,所以基于MPC简单线性化在实际应用中是有限的。由于目标设置点不同,在特定运行模式的线性模型对于其他运行模式是无效的。此外,现代柴油机进气通道系统高度非线性化,需要大量的线性模型来充分显示,不只是发动机转速和负荷的全部运行点,还有不同运行模式下的全部特性。本研究利用MPC和部件层非线性补偿器的综合优势,开发了1种柴油机多模式运行进气系统的MPC方法,并在柴油机上进行了试验。新开发的非线性补偿器基于各个部件模型的动态实时转换。试验结果显示,该方法在多模型运行中的工作效果良好,在使用时无须特定模型的控制策略和标定。研究表明,在标定工作中,尤其是在不需要固定设置点的开发过程中,该方法具有明显的优势。
多模式运行;进气系统;监督模型预测控制;非线性补偿器
0 前言
模型预测控制(MPC)最初源于化学过程控制,具有数百个输入和输出。类似的如线性二次型调节器(LQR)控制方法。LQR方法的开发目的是找出并不受约束的优化二次型成本函数。线性二次型调节器具有1个无限预测时域,更容易得到优化的状态反馈控制。然而,在实际的过程控制中,LQR受到一定的限制,其并未考虑系统的限制或非线性。为得到简化优化算法,THOMAS[1]提出了1种采用滚动时域的线性二次型优化估算和控制方法。随后,RICHALET等[2]提出了1种含有限制因素的MPC方法,这些限制因素在实际应用中易于使用。随着各种算法的开发,MARQUIS等[3]在MPC中采用状态空间形式建模。为了避免在耗时的模型不匹配检测中采用强制模拟,JEO等[4]开发了稳健的模型预测方法。MPC通过1个模型预测和对成本函数的优化来控制目标系统。在优化阶段,通常会使用二次规划解算器。在线优化问题可迭代解决,但会使发动机电控单元(ECU)的计算负荷非常高。有研究者开发了1种显性替代型优化解算器,降低了计算负荷,同时使MPC应用更加方便。这种显性的优化方法在输入和状态条件很少的情况下,使用优化的查阅表,运行良好。然而,该方法仅限于状态和约束量很少的非常简单的问题。随着计算机的发展,MPC计算负荷的限制逐渐变小,应用增加。MPC的建模方法也随着时间的推移而得到发展。从建模的角度来看,MPC可分为线性MPC和非线性MPC。线性MPC利用线性模型预测系统动态特性,因其在系统建模和控制稳定性方面具有优势,广泛用于各种领域。然而,许多系统本质上是非线性的,因此线性方法有时过于受限。这促使人们对非线性MPC进行研究。在1个有限预测时域,非线性MPC在实际使用过程中会产生一些问题,不仅存在建模问题,控制稳定性也存在问题。在有限预测时域中,当前状态和反馈状态(或模型不匹配)之间的不一致会导致稳定性变差。为了解决这个问题,研究人员开发了包括辅助干扰估算的近似算法。最近,作为1种近似算法,研究人员已经尝试将机器学习和神经网络技术用于非线性系统建模。
最初,MPC应用于采样时间相对较长的系统,如炼油业。目前,MPC也用于采样时间较短的系统,如采样时间较短的汽车电子系统。MPC在多输入和多输出系统(MIMO)中已是1种非常有效的控制方法。近年来,汽车行业出现了许多实际应用和案例研究文献,如柴油机气道系统的MPC研究等。ORTNER等[5]研究表明,相对于比例-积分(PI)控制方法,通过MPC能够改善柴油机空气质量流量和增压压力的控制。IWADARE等[6]采用带有外源输入(ARX)模型的自回归模型对系统进行了建模,并且跟踪性能比传统控制方法快得多。KHALED等[7]称,采用系统化的MPC开发方法可缩短控制器开发时间。KARLSON等[8]研究表明,基于线性化模型的MPC改善了烟度排放的不透光度排放。HUANG等[9]的研究表明,非线性MPC可用于柴油机进气道的实时控制。针对采用废气再循环(EGR)节流阀、EGR阀和可变截面涡轮增压器(VGT)的废气再循环率控制,LIAO-MCPHSON等[10]提出了1种监督MPC的方法。
上述大多数关于进气道控制的研究,都利用了MPC在多输入和多输出中的优点。在柴油机进气道系统中,需要控制很多部件,例如节气门、EGR阀和涡轮增压器执行器。因此,系统多输入和多输出的特点致使柴油机进气道系统不易控制。EGR是1种将排气通过再循环回到燃烧室的技术,通过降低燃烧过程中的气体温度来降低氮氧化物(NO x )的产生。目前,业内广泛采用双EGR法,因为其具有高度的灵活性。在双EGR系统中,通过高压废气再循环(HP EGR)阀或者低压废气再循环(LP EGR)阀来调整EGR气体流量,通过可变截面涡轮叶片位置或进气歧管节气门来调节新鲜空气流量和增压压力。执行器调节每一进气道位置的气体流量和氧濃度,但是由于两者联系紧密,难以进行有效控制。
经过研究人员的不断努力,线性MPC已被成功用于柴油机进气道控制。然而,其研究在仅有1组设定值的单一模式下进行。事实上,最新开发的柴油机需要不同的运行模式,需要低排放、高效燃油经济性和在各种环境条件下的稳定性。一些典型的柴油机进气道控制运行模式包括:冷却液低温条件下的HP EGR模式、常规运行下的双EGR模式、排气预热柴油机颗粒捕集器(DPF)再生模式和稀燃NO x 捕集器(LNT)再生所需的排气富氧模式。每种模式下进气通道或排气通道需要有不同的进气流量和氧浓度。所以,每种运行模式都要求空气流量和氧浓度等控制参数具有不同的控制目标设定点。在HP EGR模式下,仅使用HP EGR气流来保持低温工况下燃烧的稳定性;而在双EGR模式下,高压或低压EGR用于预热工况。为了净化催化器中化学吸附的NO x ,柴油机系统需要采用富氧的LNT再生模式。在DPF再生模式下,柴油机系统需要调节排气温度和氧浓度以燃烧DPF内的炭粒,为此必须通过控制进气道系统来合理控制气体质量流量和氧浓度。
在单一运行模式下,系统可在1个运行点附近将控制系统的动态特性线性化,以此来创建MPC模型。通过使用调度概念,例如基于发动机转速和负荷等,一些线性化模型可以覆盖全部工况点。然而,在多模式运行工况下,线性模型的数量会随着离散运行模式数量的增加呈比例上升。如果每种发动机模式所需的设定点不同,运行工况点发生变化,那么发动机在特定模式下的线性化模型就不能普遍适应于其他模式。采用简单的MPC线化方法,需要大量的局部线性化模型来控制多模式运行下的进气道系统。在基于MPC的控制开发中,有关该主题的研究很少。该研究的难点是在多模式运行工况下,如何有效控制这种复杂的进气道系统。针对燃油经济性和排放规定,研究人员在各种模式下对该开发型发动机进气道控制目标的设定点进行了标定。该研究的目标是开发1种保持目标设定值的控制方法,利用监督MPC和部件层非线性补偿器的综合优势,提出1种新的控制方案,并在柴油机上进行了试验。新开发的非线性补偿器基于部件模型的动态实时转换。新控制器包括3部分:用于调整目标设定点的监督MPC;非线性补偿器的部件层控制;通过虚拟传感器或者电控单元传感器进行的状态检测。
1 发动机进气道系统
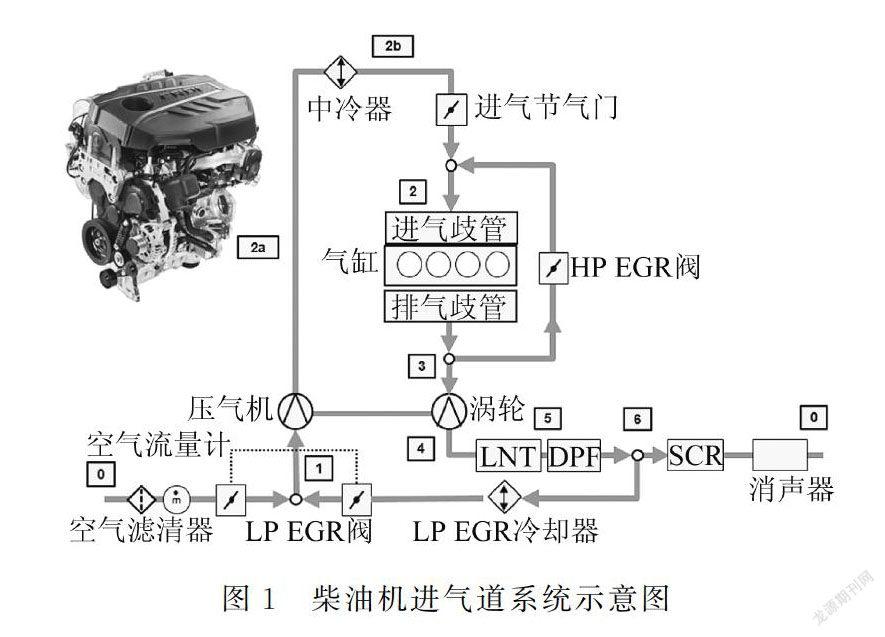
研究人员开发了1种用于1.6 L柴油机进气道的控制器。该发动机以前基于基本ECU控制方法开发,现已批量生产,标定后满足当前的排放法规,包括实际行驶循环(RDE)排放要求。进气道系统是发动机实现高效率和低排放的重要因素之一,这是因为氧含量对燃油能量转化和废气净化催化剂反应有很大影响。图1为柴油机进气道系统示意图。新鲜空气流过空气滤清器滤罐和空气流量传感器后进入。新鲜空气与LP EGR气体混合,经涡轮增压器压缩。压缩气体通过中冷器,经进气节气门到达进气歧管。气体在进入进气歧管前与HP EGR气体混合。混合气体进入气缸,参与燃料的燃烧反应,从而实现做功。在排气过程中,燃烧气体经排气歧管通过涡轮。燃烧加热的排气将能量转移到涡轮端,然后排气通过选择性催化还原(SCR)系统被净化,最终进入大气。 HP EGR将涡轮上游的气体重新循环到进气歧管,在DPF下游抽取LP EGR气体,与压气机进口的进气进行混合。
可用的ECU传感器包括空气流量计、进气歧管压力传感器,以及位于中冷器出口、LNT进口、DPF进口和SCR系统进口处的温度传感器。在LNT进口和DPF出口布置有空气流量 λ 传感器。这些 λ 传感器具有在ECU中编程的自适应功能。针对分析和验证,研究人员采用了多种附加传感器,包括氧浓度和碳氧化物浓度分析仪(AVL Puma和Horiba排放系统)。通过所测得的CO2或安装在中冷器和进气歧管中的附加 λ 传感器,技术人员可以直接测量EGR流量。
1.1 控制目标设定
针对发动机燃油经济性和排放目标,研究人员制定了气道系统的控制目标值。该研究的目标是开发1种保持目标设定值的控制方法。按照批量生产发动机,控制变量为空气质量流量、进气歧管内的氧浓度、压气机进口的氧浓度和节气门两侧的压差。可变截面涡轮增压器叶片位置的控制或EGR流量对空气质量流量的目标设定点影响极大。进气歧管的氧浓度取决于空气质量流量、HP EGR流量和LP EGR流量,可通过空气质量流量和LP EGR流量控制压气机进口的氧浓度。在HP EGR和LP EGR通路中,通过相应的EGR阀来调整EGR流量,流量会受到进口压力、出口压力和温度的影响。然而,压力和温度也会随气流而发生变化。因此,进气道系统的多目标设定点不易控制。因其仅须调整节气门位置,节气门两侧的压差相对易于控制。该进气道系统的自适应变量为HP EGR阀位置、LP EGR阀位置、可变截面涡轮增压器涡轮叶片位置和节气门位置。为了避免位置偏移,各个执行器都具有位置自适应功能。
1.2 柴油机多模式运行
发动机的实际运行需要各种运行模式来确保良好的燃油经济性,满足排放法规,并确保燃烧稳定性。该进气道系统典型的运行模式包括HP EGR模式、双EGR模式、LNT排气富氧模式和DPF再生模式。此处不对SCR系统加热模式等其他模式进行详述,因为此模式通常仅须改变喷油型式。在HP EGR模式中,EGR气流在低温条件下仅通过HP EGR路线。这是因为在低温条件下,LP EGR气体水蒸气冷凝会损坏零部件;EGR气体温度过低可能导致燃烧不稳定。在发动机充分预热后,LP EGR起动,有效确保充足的EGR流量。在该运行模式下,HP EGR也同时起动,这被称为双EGR模式。当LNT的NO x 储存量超过饱和度时,LNT需要将处于排气富氧状态下储存的NO x 转化为N2,这种排气富氧状态可以通过改变燃烧特性来实现。在该柴油机中,炭烟在DPF中累积。如同LNT,累积的炭烟超过一定限值后,DPF会氧化其中的炭烟,以防止排气流堵塞。为了燃烧掉DPF中的炭烟,系统须充分提高排气温度,并利用合适的氧浓度來氧化炭烟颗粒。
图2示出了在各种操作模式下放热率随着曲轴转角变化的示例。放热率曲线示出了油气燃烧过程中能量转化的方式,并利用所测气缸压力、理想气体定律和热力学能量平衡定律进行估算。对放热率进行比较时,即使是在相同的发动机转速和负荷下,不同模式之间燃烧过程中的化学反应也是差别巨大。在双EGR模式下,喷油蒸发潜热导致放热率在上止点后(ATDC)0 °CA前下降。在该曲轴转角之后,随着主喷燃油开始燃烧,放热率迅速增加。与双EGR模式下的放热率相比,HP EGR模式下的燃烧开启时间较早。在低温条件下,如冷却液温度在45 ℃时,燃烧稳定性很重要,燃烧相位提前。相比之下,在LNT排气富氧模式和DPF再生模式下,由于后喷原因,放热率持续的曲轴转角向后推延。在LNT排气富氧模式下,后喷会改善气缸内局部的氧化过程,所以排气的氧浓度较大。后喷会提高DPF再生模式下的排气温度。然而,仅通过燃油喷射不可能改变燃烧特性。放热率曲线与进气道控制参数高度相关,如空气质量流量、氧浓度和喷油型式。
在不同运行模式下,合适的进气道系统的控制目标设定点是不同的,因此需要许多控制目标设定点。表1示出了试验发动机所选的控制执行方式。在LNT排气富氧模式下,不可使用LP EGR模式,因为会有过量的炭烟累积于DPF内,因此LP EGR的响应要低于HP EGR。在DPF再生模式下,不可使用HP EGR,以防止过量的高温废气进入进气通道。这些气体通道的选择性使用会增加进气道系统控制的难度。
2 控制系统设计
2.1 监督MPC的结构
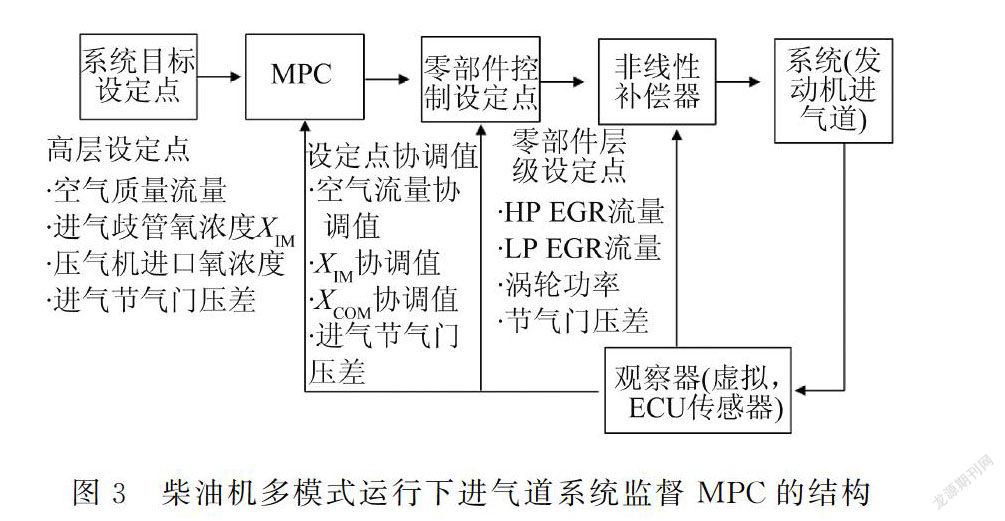
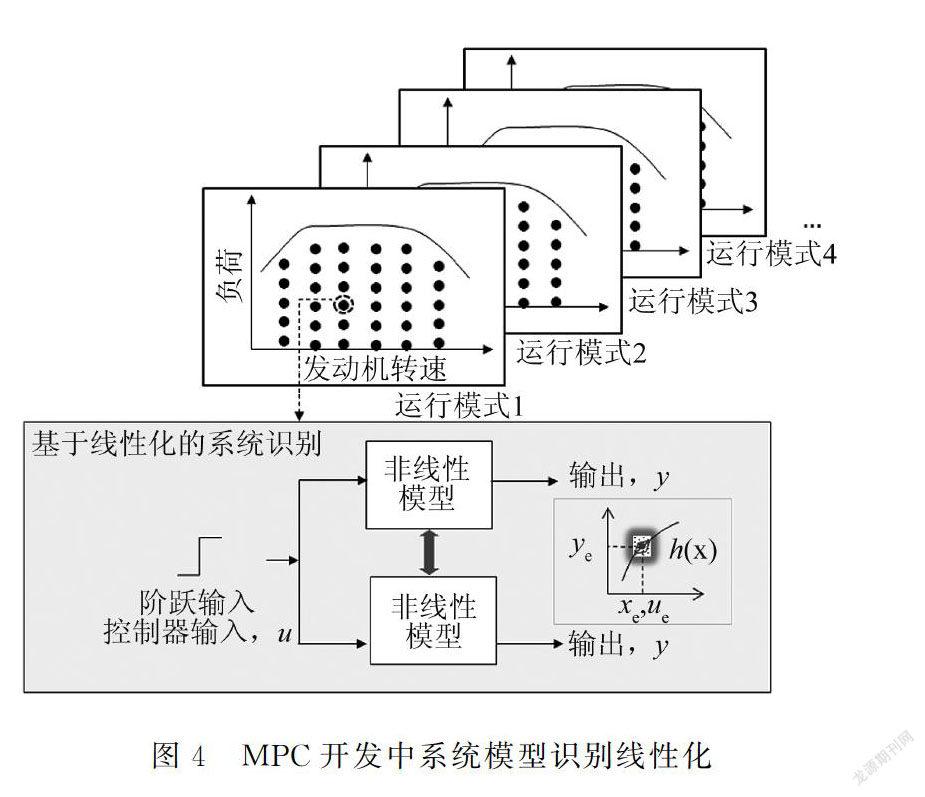
新控制方法的特点是通过MPC来调整高层设定点,而非直接计算执行器的需求。图3示出了总体控制模块、目标设定点和状态反馈。MPC作为监督控制器,接收各模式下的高层目标设定点,通过状态反馈调整这些设定点达到目标。MPC利用被调整的设定点确定部件层参考基准值,尤其是HP EGR流量、LP EGR流量,以及进气节气门两侧的压差和涡轮功率。为了满足协调设定点的目标值,可以基于理想的气体定律、质量守恒定律和能量平衡定律来确定部件层设定点。根据部件层的这些设定点,非线性补偿器可以推导出所需的执行器位置。
在该方法中,MPC的作用是通过反馈信号协调相关的目标设定点变量。对于协调而言,采用1种线性模型就足够了,而不用考虑其运行模式。为了能够通过基于MPC的线性化模型直接控制执行器,各个计划点和各种运行模式都需要许多线性化模型(图4)。线性化模型的数量与运行模式的数量成比例增长。线性化模型基于通常处于稳态的平衡点。如果控制目标设定点随每种对应的运行模式改变,则其平衡点也会变化。
研究人员利用一阶动态模型,通过其目标设定点调整实际输出。这些目标设定值中,MPC中不包括进气节气门两侧的压差,直接被转移到部件层目标设定点,因为压差与其他设定点的相互作用相对较小。一阶传递函数的时间常数( τ1、τ2和τ3 )是通过用于系统识别的动态测试确定的。在MPC协调控制目标设定点后,进气道系统模型可以估算部件层设定点,如HP EGR流量、LP EGR流量、压差和涡轮功率等。非线性补偿器决定执行器位置,以达到部件层控制控制目标设定点。
通过虚拟传感器或ECU传感器可以观察目标设定点的输出。MPC会利用检测到的状态来调整协调的设定点,以达到系统高层设定点。
2.2 MPC监督协调
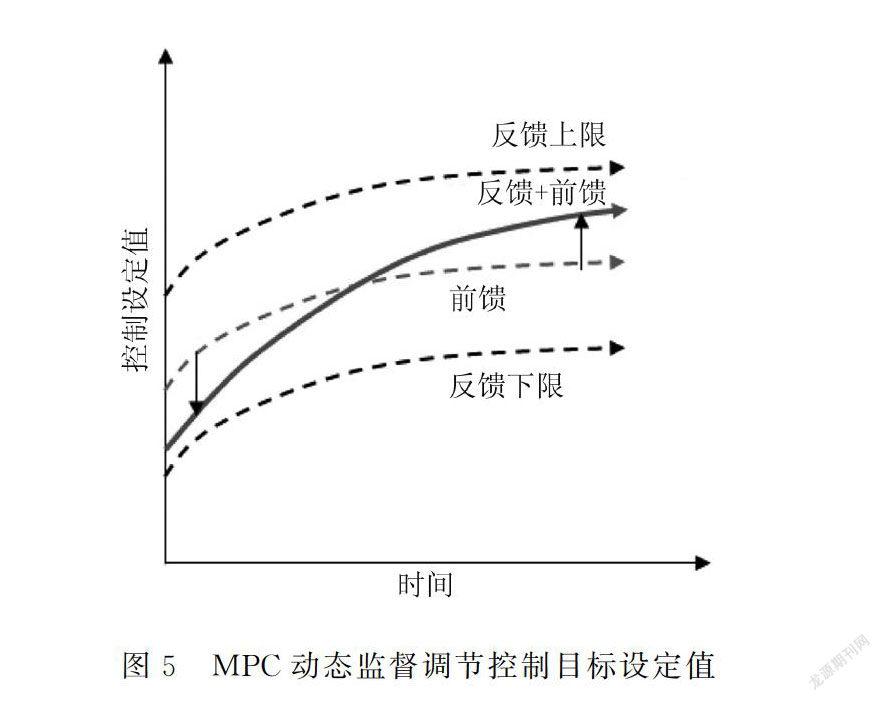
在控制器结构配置中,MPC的作用是监督协调控制目标设定点。MPC的控制目标源自ECU的设定点,根据各种运行模式,如空气流量、进气歧管氧浓度和压气机进口氧浓度,作为查找表来执行。通过MPC协调设定点,可以减少部件层设定点计算或非线性补偿器导致的跟踪错误。此外,MPC可以调整高层控制目标相关的跟踪速度。图5示出了在反馈范围内MPC的动态监督协调控制。在确定反馈上限和下限时,研究人员需要考虑包括非线性补偿器在内的总体模型性能。通过二次规划方法导出的成本函数优化结果,来推导MPC调整的设定点。这种二次规划方法是使用具有投影功能的主动集求解器开发的,可加快对最终约束集的识别。
通过1组非线性补偿器可以处理非线性极强的发动机动态特性。这些补偿器足以对发动机的动态特性进行线性化,如此采用1组线性模型可实现监督控制,而无须考虑运行模式。
2.3 非线性补偿器
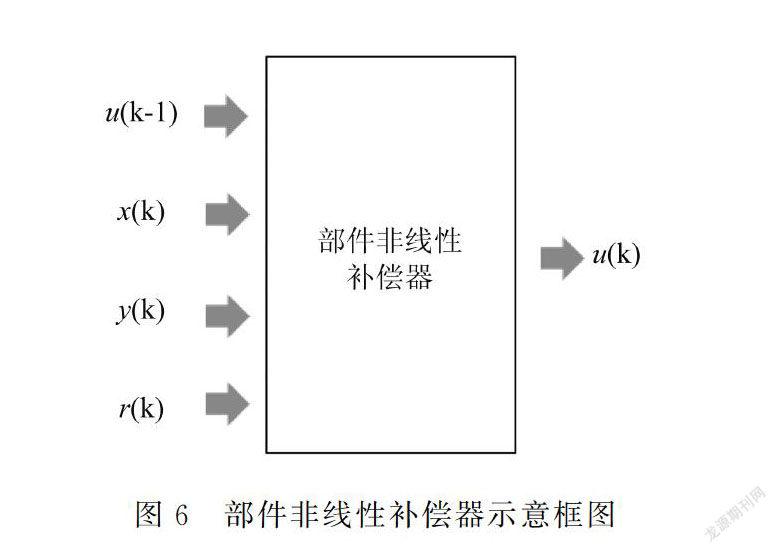
在该研究中,这些补偿器基于非线性逆动力学进行底层控制。逆动力学由LANE等提出,可用于部件的飞行控制,可以覆盖整个飞行范围。PADHI等在其传热控制研究中进一步精确了该方法。图6简要说明了本研究中所使用的非线性补偿器的概念。非线性补偿器通过诸如部件层设定点( r )、当前输出( y )、当前状态( x )和之前的执行器位置( u ( k -1))等影响因素的灵敏度进行计算,推导出执行器位置(图6)。
2.4 基于虚拟传感器的部件模型
对整个进气道系统所有的未测量状态进行估測需要几种部件模型。针对难以用ECU传感器测量的特殊状态,研究人员开发了基于虚拟传感器的模型。尽管进气道中的氧浓度可以通过气体分析仪或 λ 传感器进行测量,但出于诸如成本和耐久性等问题的原因,在实际生产的发动机中几乎是不可能的。EGR流量也不易直接测量。因此,通过物理模型与可用的ECU真实传感器相结合,虚拟传感器是非常有用的。
图7示出了非线性补偿器HP EGR阀的有效流通面积变化情况。其中, K c可以调节控制环时间,并通过动态发动机试验测试确定每个部件的有效流通面积变化。该模型以多项式形式构建,便于ECU的高效应用。
图中: A HP EGR表示HP EGR阀的有效流通面积; h 1表示部件模型; p 3表示涡轮进口压力; p 2表示进气歧管压力; T HP EGR表示HP EGR进气口温度; r 表示HP EGR流量目标设定点; y 表示HP EGR实际流量; K c表示可调参数。
在以功率形式开发涡轮增压器的部件模型中,涡轮增压器通过涡轮内的高温废气膨胀回收能量,是1种能量回收部件。回收的能量用来通过压气机压缩进气。可变截面涡轮增压器通过调节叶片来调节可回收能量,反过来又会影响涡轮进口压力。任何工况下的可用功率都取决于涡轮出口压力、涡轮进口温度和涡轮质量流量等状态。
利用涡轮功率的部件模型,线性补偿器确定了所需的涡轮进口压力,以提供足够的功率来达到压气机质量流量目标。通过压气机和涡轮能量效率,压气机流量的目标设定点可简单地转化为所需的涡轮功率。随后,使用基于涡轮特性图的多项式,将所需的涡轮进口压力映射到相应的叶片位置。
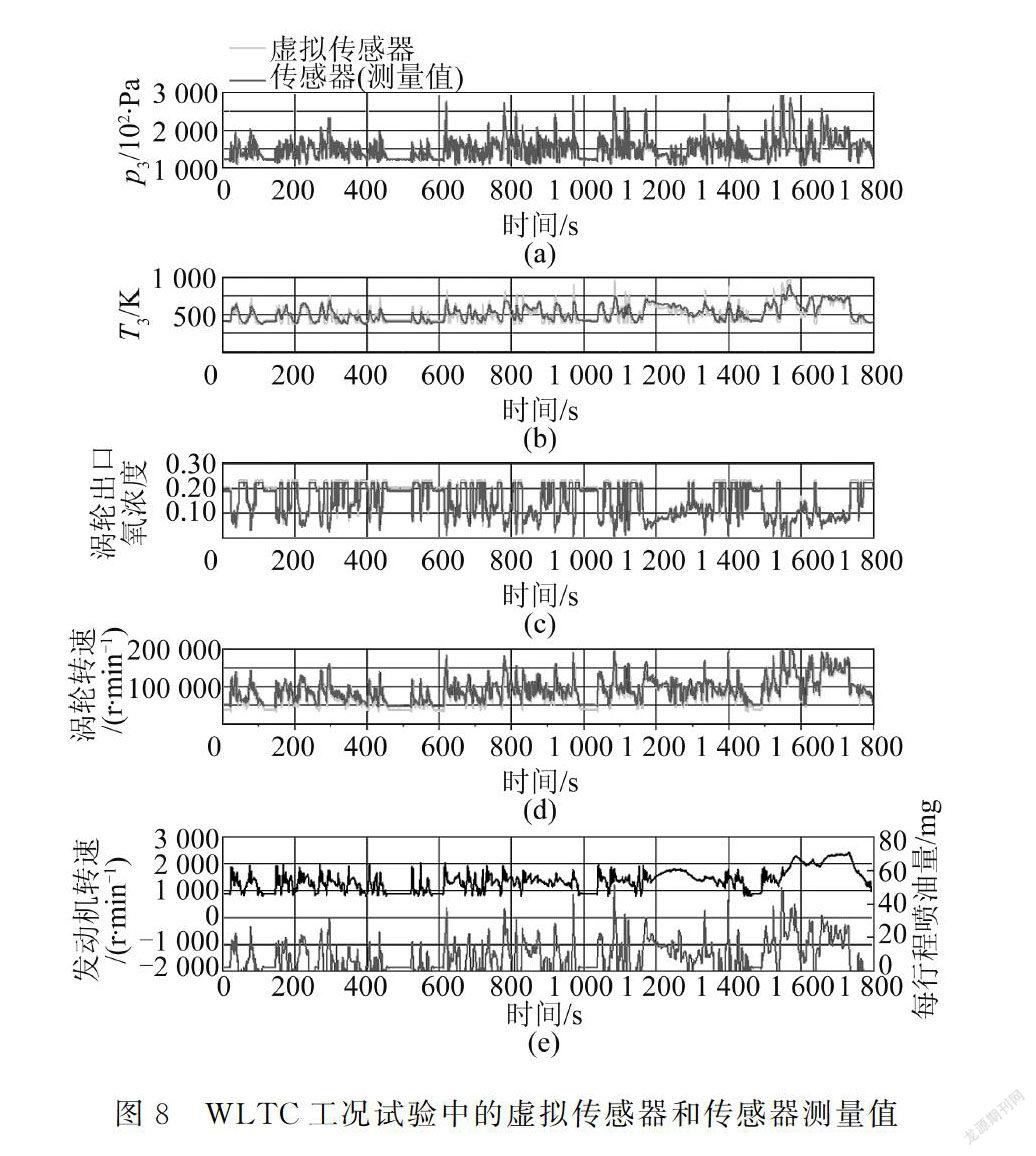
在本研究中,研究人员采用虚拟传感器构建部件模型。这些虚拟传感器是通过若干步骤开发的,如物理建模、稳态和动态阶跃试验测试的参数识别,以及ECU应用的数字化。图8对比了在全球统一的轻型车试验规程(WLTP)下的一些重要参数。尽管存在一些偏差,但是这些虚拟传感器的性能适合于所研发控制器。
3 试验结果
首先,研究人员采用模拟方式检查所开发的进气道系統控制器,然后在实际发动机和车辆上进行了性能测试。为了简化起见,本研究采用采用通过Simulink开发的控制器,然后使用快速原型工具利用旁通功能完成实施。
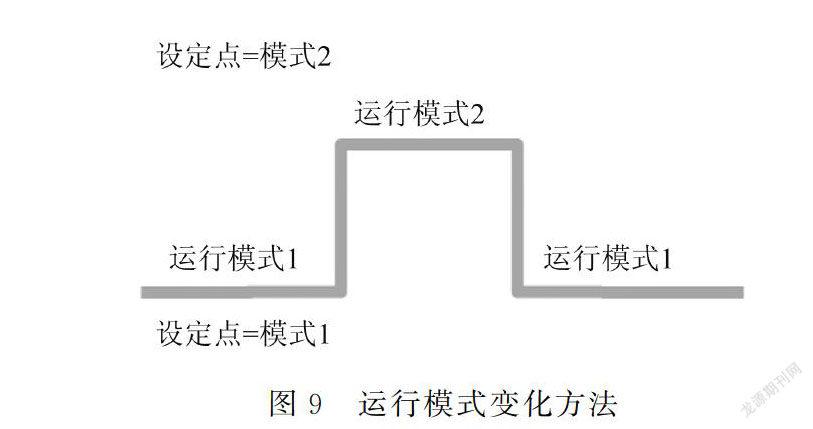
在发动机试验台上,运行模式的快速改变,类似于1个阶跃输入,从1种运行模式转化为另1种运行模式。图9示出了这种运行模式的突然改变。所有目标设定点均来自含有喷油规律在内的基础ECU。这些试验的目标是检测新开发方法的控制性能。随着运行模式的转变,高层目标设定点突然变化。在发动机试验台上进行快速模式更改后的性能测试之后,研究人员还需要根据WLTC工况测试车辆的控制性能,并需要更改某些操作模式。
3.1 常规运行模式
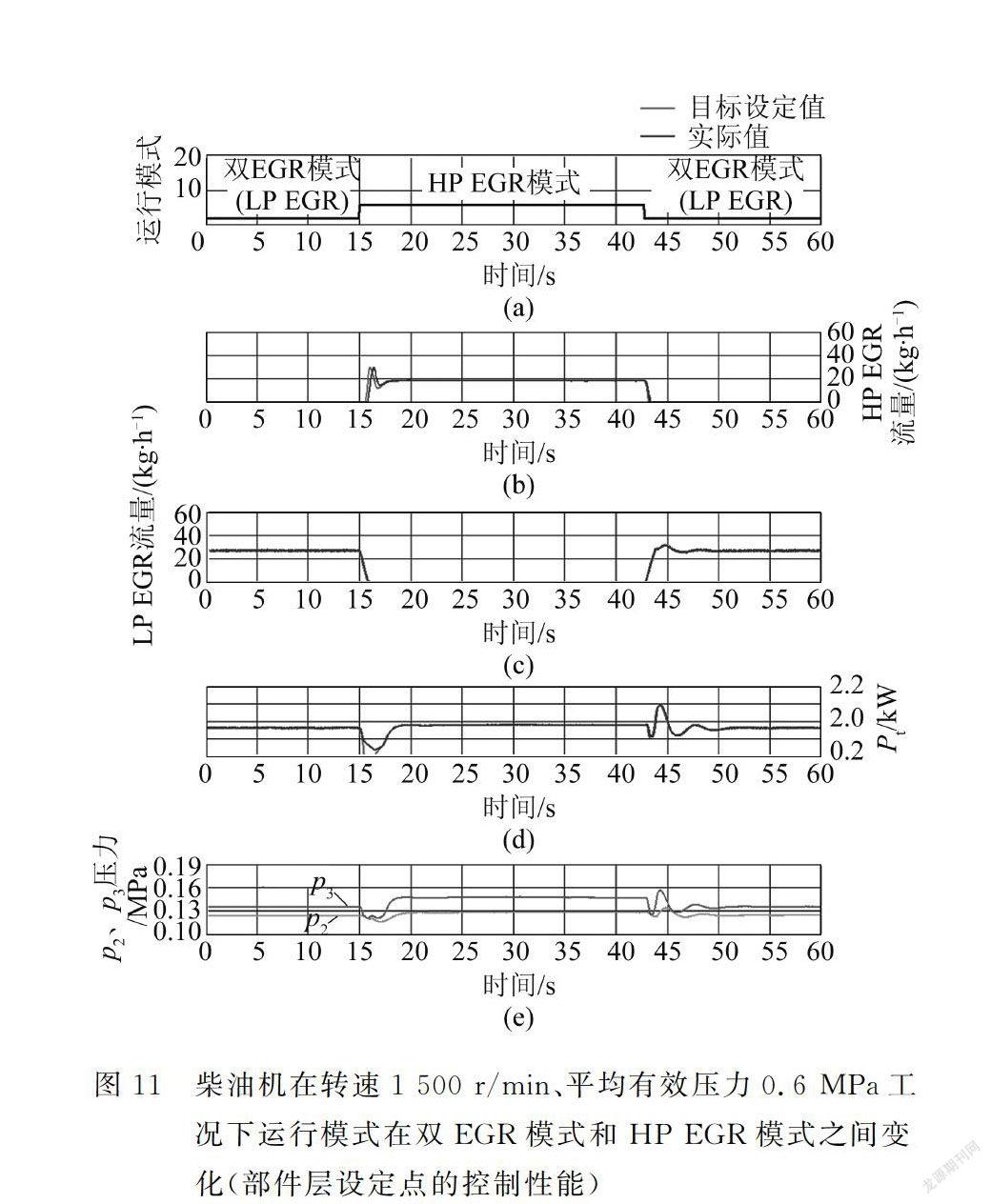
除非要求起动LNT和DPF等催化净化装置,柴油机一般在常规模式下运行,如HP EGR和双EGR模式。通过将运行模式从双EGR模式转换为HP EGR模式,研究人员对控制性能进行了测试。图10示出了高层目标设定点的跟踪性能。当运行模式改为HP EGR模式时,压气机进口的氧浓度设定点为0.23(质量分数),等同于大气环境条件,LP EGR流量为零。在双EGR模式下,同时使用HP EGR和LP EGR,但是在极端运行模式转换的发动机转速和负荷工况下,仅使用LP EGR。虽然HP EGR通常用于低温工况,但如果对冷却液温度进行调整,则运行模式会突然发生改变。因此,研究人员强行改变此模式,迫使设定点产生1个阶跃变化。将实际进气质量流量与源自基础ECU的目标设定点比较时,发动机的控制性能良好,转换完成较好。设定点突然变化,进气歧管和压气机进口氧浓度的控制良好。在转换期间,进气质量流量的偏差与确保HP EGR流量有关,这源于本研究特定的性能控制。如果模型中HP EGR两侧的压差不足以满足EGR要求,那么系统将采用VGT来达到更高的涡轮进口压力,由此减少瞬态NO x 排放。对设定点进行适合的标定后,这种功能仅在瞬态工况下起作用。如图11所示,涡轮功率暂时高于设定点,这提高了HP EGR的进口压力。如果涡轮进口压力高于所需压力,则涡轮增压器的压气机将加快工作,从而导致空气进气质量流量的增加。由于HP EGR气流来自涡轮进口,故涡轮进口和HP EGR进口压力处于相同位置。
3.2 LNT排气富氧运行模式
作为1种废气排放净化装置,LNT可以在比SCR系统激活温度更低的废气温度下储存NO x 。然而,如果储存的NO x 超过预定值,则LNT需要进入排气富氧状态,将累积的NO x 转化为N2,通过控制进气道要求和燃油喷射模式,实现排气富氧状态。在模式转换试验中,燃油喷射设定点目标值也会发生改变,因为ECU所有的目标设定点都需要保持不变。如图2所示,因为喷油模式有很大的变化,这比正常运行模式更具挑战性。针对各种运行模式,基型ECU控制方法需要采用不同的控制策略,如不同的涡轮增压器控制方法。大多数常规运行模式使用闭环控制,而开环控制则用于LNT排气富氧状态。在该情况下,研究人员需要进行额外的标定控制工作。图12和图13示出了运行模式从双EGR模式转换为LNT排气富氧模式时的性能控制。
由于在常规运行模式中提及的原因,进气质量流量存在一些瞬态偏差,但仍可以将排气质量系数 λ 很好地控制在0.95左右,以形成排气富氧状态。2种模式之间的目标设定值差异很大,但是控制性能仍可以接受,并且可以可靠地控制 λ 值。第2次转换的持续时间大约为38 s,即使涡轮进口压力下降到最低水平,与进气歧管压力相同,涡轮功率也不能达到目标值,这是因为在运行模式转换的短时间内,在废气富氧状态下,通过调整涡轮进口压力降低排气能量的增量存在限制。
3.3 DPF再生运行模式
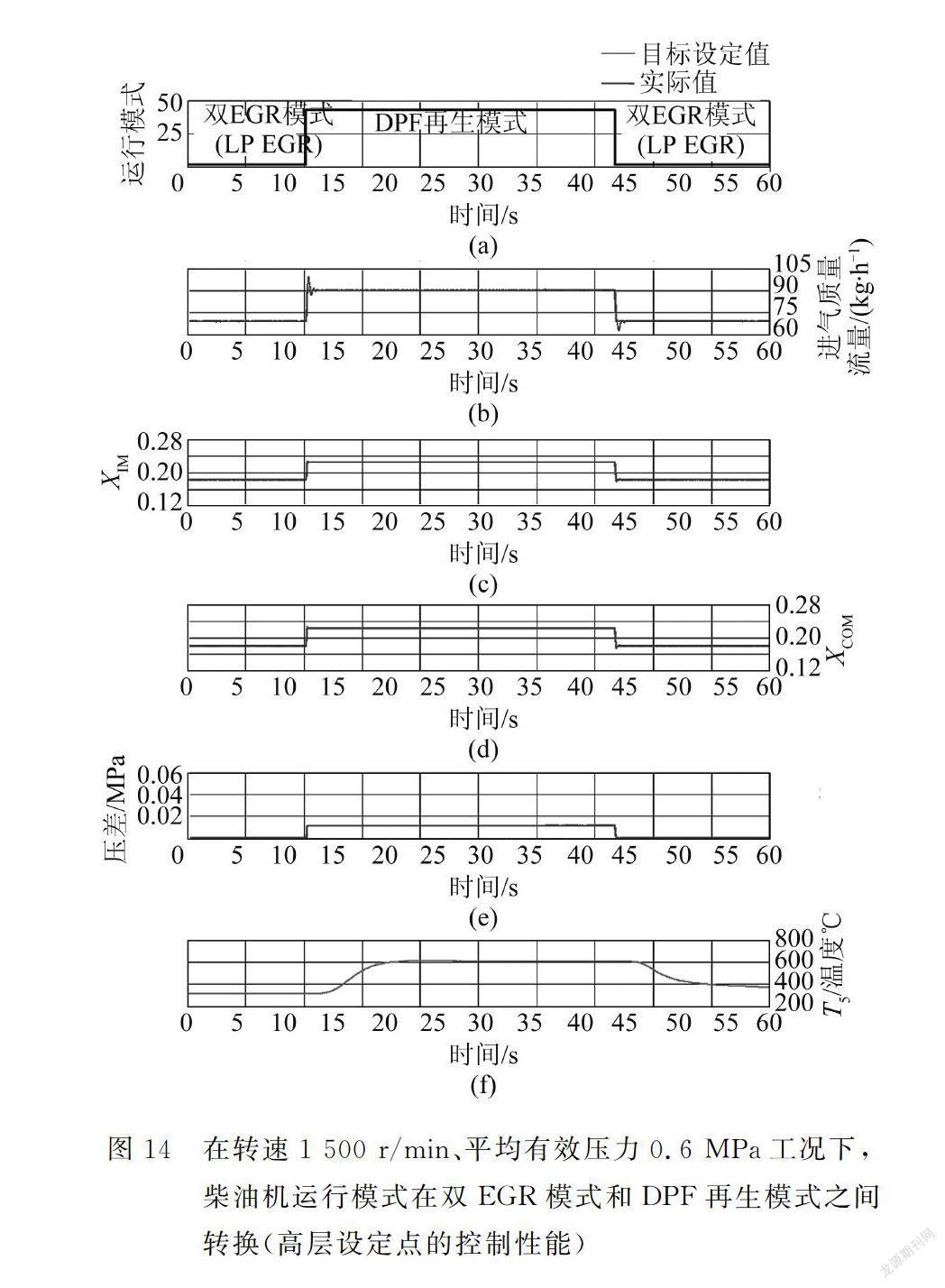
为防止DPF被大量累积的的积炭阻塞,系统需要使用DPF再生模式。在DPF再生模式下,不使用HP EGR,这是因为过高的排气温度会导致进气管路高温,并导致硬件损坏。DPF再生模式的主要目的是利用合适的氧含量提高排气温度。如果氧浓度过高,生成的热过量,会导致DPF热损坏。与其他运行模式相比较,DPF再生模式下炭烟的燃烧将被控制的较为缓慢。图14和图15示出了运行模式从双EGR模式切换到DPF再生模式期间控制进气道系统所需参数。检验结果显示,在运行模式转换期间,进气质量流量略有上冲和下冲,控制性能是合理的。如图14所示,DPF进口温度升高达到620 ℃,并且通过该控制方案保持稳定。
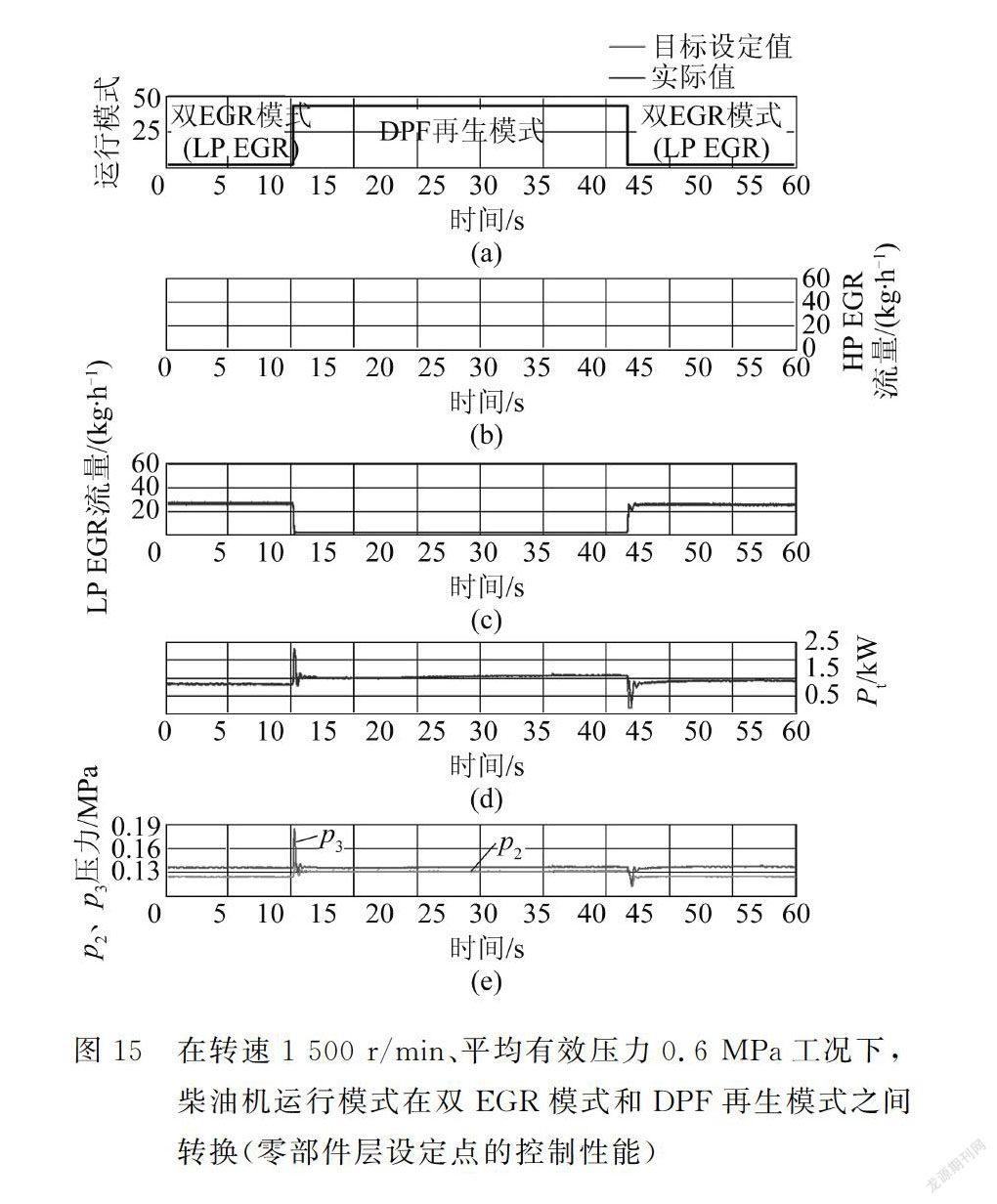
如图15所示,涡轮功率突然变化,导致进气质量流量略有上冲和下冲。尽管对HP EGR流量没有要求,但是LP EGR流量所需的目标设定值大幅下降,压气机的气体流量必须快速适应EGR流动中的这种阶跃变化。因此,预计所对应的涡轮功率设定值也会大幅变化。从双EGR模式到DPF再生模式的模式改变试验显示,所开发的控制器可很好地用于快速响应模式,也可以用于响应较慢的运行模式。在各种情况下,使用新构建的基于物理的模型,能对具有不同动态响应需求的多模式运行进行有效控制。
3.4 车辆试验
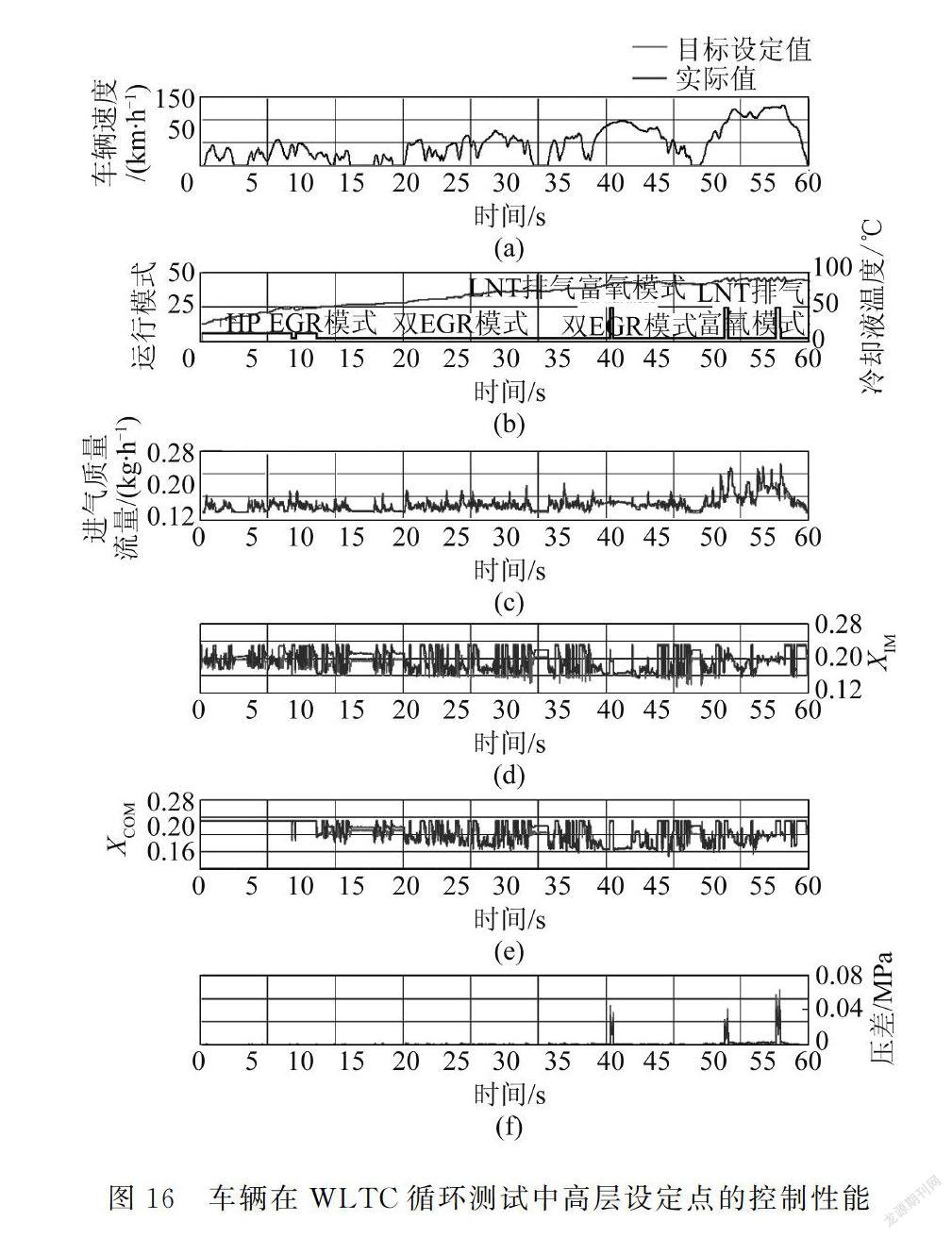
在典型的进气道系统多模式运行工况下,在发动机试验台上测试控制性能后,研究人员进行了车辆试验,以检测包括运行模式转换在内的目标设定点动态变化时的控制性能。在底盘测功机试验中,研究人员选择了乘用车,并且为新的进气道控制器增装了额外的试验设备。该车辆的发动机与发动机试验中的发动机规格相同。车辆试验在WLTC工况下进行,这是1种典型的底盘测功机验证循环,试验条件等同于认证条件。表2为车辆控制性能相关参数,图16为车辆在WLTC循环测试中高层设定点的性能控制。尽管运行模式发生了一些变化,但是跟踪性能等同于或优于基本ECU控制器。在表2中,研究人员通过均方根误差(RMSE)对比了控制跟踪性能。RMSE用来衡量2个值之间的偏差,偏差值越小表明跟踪性能越好。表2中不包含压降,因为基本ECU可以通过开环控制该值,以确保稳定性。
如图16所示,因为是在冷却液低温条件下,运行模式始于HP EGR模式。随着冷却液温度的升高,為了使用HP EGR和LP EGR 2种模式,存在模式的转换变化。在1 200 s以后,系统首次进入LNT废气富氧模式。在氧浓度的控制中,一些区域存在较大的偏差。在发动机低转速和低负荷的特定区域,这些偏差是显而易见的。在这些区域内,使用ECU前馈表格来控制LP EGR流量和/或涡轮功率,确保与ECU策略具有可对比。利用预先确定的执行器阀位置对局部区域进行控制的方法通常被用于模型和传感器高度不确定的区域,ECU会自动调整标设定值,以满足基本ECU的高水平目标设定值。
在WLTC工况下,MPC监督协调的反馈范围分别是:进气质量流量±22 kg/h、进气歧管氧浓度±0.007 5(质量分数)、压气机进口氧浓度±0.007 5(质量分数)。为了达到基础ECU高层目标设定点,ECU对目标设定点进行指示调整。在本研究中,ECU通过反馈范围确定调整范围。如果非线性补偿器和模型的精确性更高,技术人员则可进一步减小调整范围,使ECU能更快地控制系统。
4 结论
本文提出了1种新的进气道系统的控制方案,并在柴油机上进行了试验。控制方案利用底层非线性补偿器和MPC监督的综合优势,开发的非线性补偿器基于部件模型的实时动态转换。在新的控制结构中,MPC监督调整高层设定点,确保稳态零偏移的快速跟踪。研究人员采用一阶转换函数对调整动态特性进行了建模,对非线性补偿器控制HP EGR质量流量、LP EGR质量流量、涡轮功率和进气节气门压差的部件层设定目标点。研究人员将MPC和非线性补偿器相结合,比采用其他方法更有效地处理非线性系统的线性化工作,这是因为发动机的线性化原则上可以通过使用非线性补偿器来实现。
发动机试验台模式转换试验表明,即使在设定点变化幅度大的情况下,新开发的控制方法也能很好地工作,可轻易地处理各种模式下的不同要求。在不同情况下,使用新构建的基于物理学的模型,能在多模式 运行中进行有效控制。车辆试验表明,相对于基础ECU控制器,基于对RMSE控制误差的评估,可成功使用新控制方案的控制特性。发动机试验台架和底盘测功机试的验结果表明,本研究所提议方法的显著优势在于无须特定模式的控制策略和标定。在诸如柴油机进气道系统等多模式运行的复杂系统的开发工作中,这种优势显而易见。
[1]THOMAS Y A. Linear quadratic optimal estimation and control with receding horizon[J]. Electronics Letters ,1975,11:19-21.
[2]RICHALET J, RAULT A, TESTUD J L, et al. Model predictive heuristic control[J]. Automatica, 1978.
[3]MARQUIS P, BROUSTAIL J P, SMOC A. Bridge between state space and model predictive controllers: application to the automation of a hydrotreating unit[J]. IFAC Proceedings, 1988, 21(4).
[4]JOE Q S, BADGWELL T A. A survey of industrial model predictive control technology[J]. Control Engineering Practice, 2003,11(7).
[5]ORTNER P, LANGTHALER P, ORTIZ J V G, et al. MPC for a diesel engine air path using an explicit approach for constraint systems[C]. IEEE International Symposium on Intelligent Control, 2006.
[6]IWADARE M, UENO M, ADACHI, S. Multi-variable air-path management for a clean diesel engine using model predictive control[C].SAE Technical Paper 2009-01-0733.
[7]KHALED N, CUNNINGHAM M, PEKAR J, et al. Multivariable control of dual loop EGR diesel engine with a variable geometry turbo[C].SAE Technical Paper 2014-01-1357.
[8]KARLSSON M, EKHOLM K, STRANDH P, et al. Multiple-input multiple-output model predictive control of a diesel engine[J]. IFAC Proceedings, 2010.
[9]HUANG M, LIAO-MCPHERSON D, KIM S, et al. Toward real-time automotive model predictive control: a perspective from a diesel air path control development[C]. Annual American Control Conference (ACC), 2018.
[10]LIAO-MCPHERSON D, KOLMANOVSKY I, HUANG M, et al. Supervisory model predictive controller for diesel engine emissions control[P]. U.S. Patent, 10422290, 2019.
高英英 曹杰 张然治 译自 SAE Paper 2020-01-0269
虞 展 编辑
(收稿时间:2021-02-09)