基于车载摄像头的车辆前方移动光源轨迹预测算法
2021-09-10刘志伟朱大全
罗 石,刘志伟,朱大全
(江苏大学 汽车与交通工程学院,江苏 镇江 212013)
0 引 言
为了有效降低因夜间环境背景光和车辆会车时交汇的车灯灯光之间亮度差过大而容易使对驾驶员造成眩目的问题,汽车自适应大灯技术应运而生。在新一代的自适应大灯(adaptive driving beam,ADB)系统中,车载摄像头对于车辆前方移动光源的位置的实时捕捉成为了系统控制的重要参数。通过获取该车辆前方的车灯位置并熄灭己车与之对应部分的车灯,从而提高驾驶员的视线距离,帮助驾驶员看清道路环境,并且不给其他道路使用者造成眩目、不适和注意力分散等不利影响[1]。但汽车是高速运动的物体,且夜间的灯光种类也较为复杂,仅凭车载摄像头在某单一时刻所捕捉到的车辆前方的路况信息进行己车车灯控制,容易导致自适应大灯系统控制滞后,而且很难准确筛选出车灯光源和非车灯光源,严重影响了系统控制地实时性和准确性。目前,虽然世界各大汽车厂商都加大了自适应大灯系统的研发力度,但对于提高系统控制实时性和准确性方面,却还没有公开的且较为成熟的方案。
本文针对提高自适应大灯系统的实时性和准确性控制中,提出基于车载摄像头的车辆前方移动光源轨迹预测算法。在算法中,将自适应修正卡尔曼滤波(Kalman filtering,KF)滤波跟踪算法嵌入道AR预测模型中。具体的,以汽车当前行驶环境特征作为目标车灯光源在摄像头采集平面内位置坐标的筛选依据,并将该坐标作为作为输入带入KF算法[2]构成自适应修正KF算法,该算法作为本文预测算法的组成部分,将为AR模型提供高精度的目标车灯光源历史轨迹点序列,并通过AR模型的构建,得到目标车灯光源在未来特定时长的运动轨迹预测序列。该序列可弥补ADB系统在控制信号传输和算法运算导致的控制延时,提高系统控制的实时性和准确性。
1 自适应修正KF算法
根据交通法规规定的除超车、转向等特殊情况之外,车辆应当保持在所处的两侧车道线范围内行驶,因此,在夜间道路中与车辆保持同步的车灯的轨迹也应当保持在由车道线所限定的狭长范围内,故每条车灯的轨迹应分布在对应的行驶车道内。
1.1 筛选跟踪区域
首先对车载摄像头采集平面内的车灯光源进行网格聚类算法提取和位置坐标记录。针对夜间车灯的特征区别度较低,难以区分其它车道的车灯以及路灯、广告牌反光等杂光并准确地跟踪目标车道中的目标车灯光源的位置信息,对摄像头所采集到的各类光源运动信息进行筛选和剔除。具体分为以下步骤:
步骤1 车道线拟合。对摄像头采集平面内的车道线进行中值滤波、Canny边缘增强、基于车道线弧度的Hough变换和线性逼近等工作,实现对于车道线的拟合标定[3,4],得到车道线在摄像头采集平面内的任意位置的坐标以及当前行驶路况中任意一个车道区域i段车道区域内、外两侧车道线的拟合斜率ki,a和ki,b。
步骤2 跟踪区域设定。提取k时刻车灯轨迹点的位置坐标(xk,yk),其中,xk和yk分别k为时刻目标车灯光源中心位置在车载摄像头采集平面内的X轴和Y轴坐标。设从k时刻到k+1时刻的Δk的时间间隔内目标车灯在视觉平面的移动位移为Δs,y轴内移动的位移为Δy。在Δk内移动的角度为θ,由于θ值极小,故可认为Δs近似等于Δy。则根据与目标移动光源中心位置相适应的对应车道区域内的第i段车道区域内、外两侧车道线的拟合斜率ki,a和ki,b以及近似的单位时间移动视距Δy,可得到跟踪区域H的表达式,如式(1)所示
(1)
根据跟踪区域H所设定的范围,则可对目标移动光源中心位置坐标在下一时刻的可能位置进行合理跟踪预测,排除其它车灯光源和非车灯光源的干扰,跟踪区域H如图1中的阴影部分所示。

图1 跟踪区域筛选
1.2 目标车灯光源轨迹跟踪
建立自适应修正KF算法方程组
(2)
式中Xk=(xk,yk,Δy)T为1×3维状态方程向量,Zk=(x′k,y′k,Δy′)为k时刻的系统量测值;v1为均值为0的白噪声,协方差为Q。A为状态转移矩阵,C为量测矩阵,皆为三阶单位阵。
将(k+1)时刻摄像头捕捉到的所有量测值与上述的跟踪区域H进行对比,若扫描到在该时刻有实测值U(k+1)在H内,则判定该实测值为目标轨迹在(k+1)时刻的实测值;若没有扫描到该时刻的任何实测值在H内,则认为该轨迹点在(k+1)时刻遇到噪声干扰,量测值失真,可将k时刻的预测值作为(k+1)时刻的实测值。用公式表达上述关系为
(3)
将修正过的实测值M(k+1)的值代入自适应修正KF递推方程组中
(4)
2 AR(p)模型的建立与各项参数的确定
2.1 AR(p)模型建立
AR(p)模型的原理为根据已确知的历史记录数据进行组合,从而得到关心时间区域内的预测信息[5],因此,可以对无规则运动轨迹进行预测。AR(p)模型的一般公式如下
(5)
式中y(k)为AR(p)模型在k时刻目标车灯光源位置坐标的预测值;y(k-i)为时间序列{y(t),t=1,2,…,N}中的所选取的一段目标光源历史轨迹数据,可通过自适应修KF算法得到;{ai,i=1,2,…,p}为模型的自回归系数序列;p为模型阶数;白噪声{ξ(k),t=1,2,…,p}的为均值为零。若令θT(k)=[a1,a2,…,ap],目标光源历史轨迹数据XT(k)=[yk-1,yk-2,…,yk-p],则AR(p)模型的一般公式可以表示为[6]
y(k)=XT(k)θ(k)+ξk
(6)
2.2 自回归系数最优估计的确定[7]

S=(y(k)-θ(k)(k))T(y(k)-θ(k)(k))
(7)
(8)
2.3 准则确定模型最优阶数

AIC准则的计算公式为
AIC(p)=ln|(p)|+2p/N
(9)
(10)
则AR(p)模型的完整公式[9]为
(11)
3 算法预测性能仿真验证
3.1 试验平台搭建
在本文中,采用搭载OV10635芯片的车载摄像头对夜间前方目标车灯光源进行捕捉,并将移动光源的位置坐标信息通过CAN总线传递给上位机。该摄像头模块具有30帧/s的图像处理能力,有效像素大小为1 280×720[10],满足夜间道路实时捕捉移动光源的要求。本文在算法性能验证的诸多实车实验中,随机选择一组车流量较大的城市路况采集结果进行数据分析对比,如图2(a)所示,其共有4个车道W1,W2,W3,W4,分别对应车道线为r1,r2,r3,如图2(b)所示,在图中存在路灯和其它车辆的车灯等干扰光源。本文对自车前方左侧对向车道的来车的(如图2(a)左侧方框车辆)的车大灯光源进行实时捕捉。
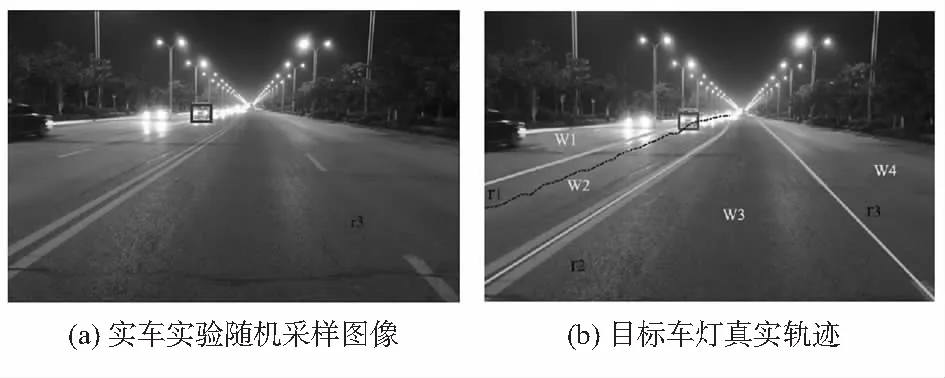
图2 城市道路采样
3.2 自适应修正KF算法验证
在对车辆前方移动光源跟踪算法的仿真验证中,首先对图2(a)中目标车灯的真实运动轨迹进行标记,如图2(b)所示。为了验证本文跟踪算法在夜间道路中跟踪移动光源的效果,在对目标车灯的跟踪中分别应用传统KF算法和本文跟踪算法作为对比,预测效果分别如图3(a),(b)所示。从对比可知,本文跟踪算法较比传统KF算法跟踪精确度更高,尤其在有路灯和其它车灯等干扰光源影响的时候。

图3 真实轨迹与两种跟踪算法轨迹
图4为两种算法分别在有路灯干扰和其它车灯干扰时的精确度差别。其中,图4(a),(c)分别为传统KF算法在有路灯干扰和其它车灯干扰时的跟踪效果图,由于无法对两种干扰光源做出有效识别和排除,导致其每一帧的最优估计值(菱形曲线)都偏离真实值(实曲线),且偏离幅值较大;图4(b)和(d)分别为本文跟踪算法在有路灯干扰和其它车灯干扰时的跟踪效果图,在对两种干扰光源进行识别并消除后,其最优估计值曲线近乎接近真实运动轨迹,跟踪效果远远优于传统KF算法。

图4 两种算法对杂光干扰的排除效果对比
两种KF算法的误差对比如图5所示,实曲线为本文跟踪算法跟踪误差曲线,虚曲线为传统KF算法误差曲线。由误差对比图可以看出,经本文跟踪算法修正后,可基本排除夜间道路中的其它车灯光源和干扰光源对移动光源轨迹跟踪预测的影响,其跟踪误差控制在4个像素点以内,预测精确度在98 %以上,可为AR(p)模型实时提供精确的历史数据时间序列更新值。

图5 两种卡尔曼滤波算法误差对比
3.3 AR(p)模型算法验证
在对自适应修正卡曼滤波算法进行验证的基础上,将模型所需历史数据时间序列数N定为30,预测时间步h长为30(1 s),以评估该模型的多时间步长预测性能。预测效果图如图6所示。
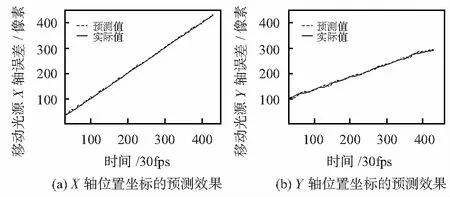
图6 AR(p)模型对比图
图6(a)为对目标移动光源X轴位置坐标的预测效果图,图6(b)为对目标移动光源Y轴位置坐标的预测效果图。图7为AR(p)模型的预测误差图,从图中可以看出,对自回归系数进行卡尔曼滤波后得到的AR(p)模型的1 s预测精度非常高,误差率在5 %以下。

图7 AR(p)模型预测误差图
4 结 论
针对ADB系统对控制准确性和实时性的需求,提出了在AR(p)模型中融入自适应修正KF算法。考虑到夜间道路环境的复杂性和特殊性,并汽车当前行驶环境特征作为筛选目标车灯光源为基础,提出了自适应修正KF算法,以实时修正更新历史数据时间序列。并将更新的时间序列作为AR(p)模型中的模型输入,以得到更为精确的多时间步长预测值。实验验证结果表明:融入了自适应修正KF算法的AR(p)模型对目标车灯光源的运动轨迹具有更高的预测精度,能够充分满足ADB系统控制的实时性和准确性要求。