力平衡模式下MEMS陀螺正交误差实时校正系统设计*
2021-09-10朱晓磊郭述文徐大诚
朱晓磊,郭述文,徐大诚,樊 波,卜 峰
(苏州大学 电子信息学院,江苏 苏州 215100)
0 引 言
微机电系统(micro-electro-mechanical system,MEMS)陀螺是一种基于科氏原理的角速率传感器,具有体积小、可靠性高、成本低等优点[1]。硅微MEMS陀螺基于硅材料,采用微机械加工工艺制作而成。受加工精度限制,成品形状、尺寸等参数与设计值不一致,即存在加工误差。陀螺实际的驱动模态方向与检测模态方向不完全正交,导致正交耦合[2],检测模态在无角速度输入的情况下输出正交误差信号,限制陀螺零偏的稳定性。因此,对正交误差进行校正具有意义。正交误差可以采用结构修调[3]方式校正,但这种方法成本较高,不适合大规模应用。也能通过电路进行校正,文献[4]在信号层面对正交误差进行自补偿;文献[5]通过交流反馈力抵消正交力,抑制正交误差;文献[6]在校正电极上施加直流电压校正刚度耦合,从源头上消除了正交误差。
本文以硅微十六边形环式陀螺为研究对象,分析了正交误差产生的原因及其温度漂移对零偏性能的影响,设计了检测模态科氏力平衡模式下的正交实时校正系统。通过仿真和实验验证了系统功能,并测试了性能。
1 正交误差分析
1.1 正交误差的产生
加工误差的存在导致驱动模态方向与检测模态方向不完全正交,从而引起机械耦合。正交误差产生原理如图1所示。图1中,x为驱动轴方向,y为检测轴方向,z为外界角速度输入方向。

图1 正交误差的产生
将误差考虑在内,陀螺的动力学方程如式(1)
(1)
式中mx,my为陀螺驱动模态和检测模态的等效质量;cx,cy为阻尼系数;kx,ky为刚度系数;cxy,cyx为阻尼耦合系数;kxy,kyx为刚度耦合系数。Fd为驱动静电力幅度,ωx为驱动模态谐振频率,Ω(t)为沿z轴方向的输入角速度,Ffd为检测端反馈力,开环为0,闭环时不为0。
当陀螺正常工作时,激励信号频率等于谐振频率,驱动模态运动方程可表示为
(2)
式中Ax为驱动模态振动幅度,Qx为驱动模态品质因数。θx为谐振时的相位,理想时是-90°。
将式(2)代入式(1)中下式,开环时可得式(3)
kyxAxsin(ωxt)-cyxAxωxcos(ωxt)
(3)
由上式可得检测模态的三个输入分别为科氏力、正交耦合力和阻尼耦合力。
1.2 正交误差的影响
科氏力与阻尼耦合力同相,与正交力有90°的相位差。真空封装的高Q值陀螺阻尼耦合系数非常小,可忽略。科氏力Fc与正交力Fq的比值为
(4)
通常,输入角速度为几十或几百,而谐振频率约为5 000 Hz。因此,很小的刚度耦合引起的正交误差能等效为较大的输入角速度[7]。
检测模态的输出信号为
Vsense=Accos(ωxt)+Aqsin(ωxt)
(5)
式中Ac为科氏电压信号幅度;Aq为正交电压信号幅度。不考虑相位误差,同步解调可以有效地消除正交误差对输出信号的影响[8]
VΩ=0=Ac/2=0
(6)
实际中,陀螺工作状态、接口电路、AD及DA电路等都会带来相位延迟[9]。将相位误差考虑在内,开环时,科氏信号输出为
(7)
式中φopen为开环时解调信号与科氏信号的相位误差。闭环时,科氏环路输出为
(8)
式中φclose为闭环时的相位误差,Kv-fs为检测模态电压—静电力转换系数。由式(7)、式(8)可知,在开环与闭环检测模式下,陀螺的零偏输出都会受到正交误差的影响,正交误差的波动恶化了陀螺的零偏不稳定性。它的温度漂移造成了陀螺零偏的变化。
2 正交校正电极
实验使用了十六边形环式陀螺,其结构示意图如图2所示。通过8根交替辐条将14个同轴十六边形环与中心锚点相连。16个外部电极则分布在最外环的外侧。22.5°及67.5°的电极是正交校正电极QNP与QNN。
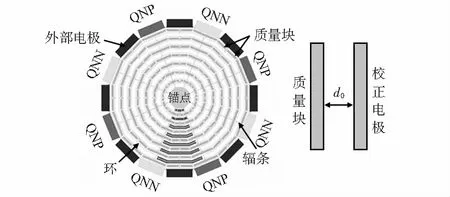
图2 十六边形环式陀螺结构示意
非理想条件下,系统刚度矩阵为
(9)
式中θ为失调角,Ke为校正电极产生的刚度。对校正电极施加直流电压Vi,单个电极产生的刚度可表示为[10]
(10)
式中n为模态阶数,此处为2,ε0为介电常数,S为电极面积,d0为初始间距,α为电极弧角,φ为校正电极位置。刚度耦合校正的本质是通过调节直流电压,使校正电极产生的刚度之和Kc与陀螺刚度矩阵中的耦合项抵消。
3 系统及其仿真
3.1 系统原理
基于以上分析,设计了结合正交误差实时校正的闭环检测系统。系统原理如图3所示。系统由正交误差实时校正环路与科氏力平衡环路构成。通过乘法幅度解调的方式提取信号幅度,采用比例—积分(proportional integral,PI)控制器消除误差。

图3 检测系统原理
A点是检测模态输出信号,通过解调,可得正交信号幅度(B点)与科氏信号幅度(D点)。在正交校正闭环中,正交幅度信号作为环路的误差项输入PI控制器,直流输出量经D/A转换后与偏置电压Vdc叠加施加到正交校正电极上。Kq是校正电极电压与刚度的转换系数,校正电压产生的耦合刚度为k′yx(C点)。本系统采用了PI控制器,是一个Ⅰ型系统,稳态误差为零。因此,系统稳定时,k′yx=-kyx,F点刚度耦合消除,正交误差被抑制。
在科氏力平衡闭环中,科氏信号幅度作为误差信号输入PI控制器,控制交流反馈电压的幅度。反馈信号经D/A转换后施加到检测电极上。E点反馈力为为F′c。当环路稳定时,F′c=-Fc,检测模态输入的科氏力被抵消,科氏信号幅度为零。反馈电压即为闭环时科氏输出。
3.2 系统仿真
基于图3所示的原理在SIMULINK仿真软件中建立仿真模型。仿真结果如图4。

图4 仿真结果
图4中,图(a),图(b)是正交误差信号及正交校正电压。随着正交校正电压的增大,正交误差信号迅速减小,环路稳定时,正交误差被抑制,校正电压幅度为常数;图4(c),(d)是科氏环路误差信号及反馈交流电压的幅度,环路稳定时,误差为零。由于正交误差被校正,闭环时科氏输出为零。图4(e)是检测模态输出,信号逐渐减小,趋近于零。由以上结果可知,闭环稳定时,正交误差被校正,科氏环路工作在力平衡状态,检测模态无信号输出。
4 实 验
基于现场可编程门阵列(field programmable gate array,FPGA)实验平台实现该系统,通过串口获取各点信号。实验环境如图5所示。

图5 实验环境
正交校正闭环与科氏力平衡过程如图6所示。图6中的(a)~(d)与图4中的对应。启动后,正交误差信号与科氏力信号随着校正电压与反馈信号的增大而减小。当环路稳定时,误差被消除,校正电压是一个常数。

图6 环路稳定过程
驱动与检测模态输出信号如图7所示。图7(a)是校正前,两模态输出信号,检测模态与驱动模态输出信号相位差为0°,由此可知检测模态输出信号主要是正交误差信号。图7(b)是校正后,两模态输出信号,检测模态无信号输出,说明正交校正闭环与科氏力平衡闭环效果良好。
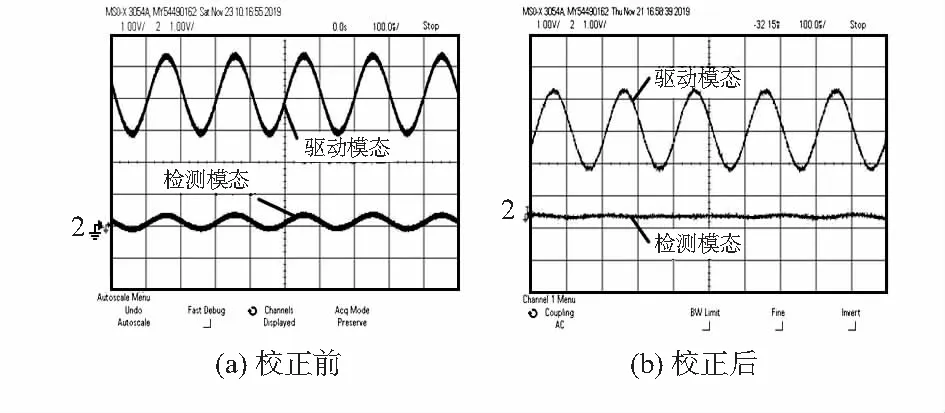
图7 检测模态输出
在5~65 ℃变温条件下,对正交误差手动一次性校正与实时校正情况下的零偏进行测试。零偏温度实验过程中利用谐振频率进行温度自检测[11],实验结果如图8。由图8可知,温度由5 ℃上升到65 ℃,正交误差变化较大;零偏在一次性校正时,变化约为0.75°/s;加入实时校正环路后,降低为0.1°/s,零偏输出温漂减小了7.5倍。

图8 温度测试结果
在常温下使陀螺工作0.5 h,待输出完全稳定后采集科氏输出数据1 h。图9是力平衡模式下正交一次性校正、实时校正时科氏输出Allan方差曲线。由图9中的Allan方差曲线可知,无校正时,系统的零偏不稳定性为4.05°/h,温度引起的低频漂移限制了性能的提高;加入实时校正之后的零偏不稳定性为0.96°/h。

图9 Allan方差曲线
5 结 论
本文分析了MEMS陀螺正交误差产生的原因及其对性能的影响。结合十六边形环式陀螺的正交校正电极,设计了科氏力平衡模式下的正交实时校正系统,并通过仿真与实验验证了系统功能。性能测试表明:在5~65 ℃温度范围内,零偏温漂由无校正的0.75°/s变为校正后的0.1°/s;常温下,零偏不稳定性由4.05°/h降低为0.96°/h。以上结果表明正交误差实时校正对陀螺性能改善明显。