一种面向高速公路自动驾驶的人机交互方案设计
2021-09-09岳丽姣刘法勇
岳丽姣,时 利,刘法勇
(安徽江淮汽车技术中心 智能网联研究院,安徽 合肥 230601)
引言
随着摄像头、雷达、车载处理平台软硬件的技术升级,再加上高精度地图及高精度定位系统的辅助,越来越多车企开始推出涵盖高速公路自动驾驶功能的车型,功能等级定位于L2~L3级自动驾驶。但按照L3级自动驾驶标准的定义,系统只有在满足必备的车身条件,并且在驾驶员注意力关注前方道路,运行在设计的可行驶区域内时才能够完成自动驾驶任务。这就要求在系统不满足功能运行条件时,驾驶员必须保证随时可以接管车辆。因此,高速公路自动驾驶及汽车对人机交互提出了新的挑战,在真正的无人驾驶实现之前,对于应对各种场景的自动驾驶技术来说,其人机交互方案的设计,都显得尤为重要。
1 人机交互系统设计
1.1 人机交互系统架构设计
本方案中设计的人机交互终端设备主要有仪表、MP5、安全带三种,其与自动驾驶控制器的通讯通过CAN实现。
自动驾驶系统的人机交互系统架构设计包括仪表、MP5、车身控制器、网关、自动驾驶域控制器等三个主要部件,仪表、MP5、车身控制器的CAN信息通过中央网关与自动驾驶控制器所在的ADASCAN通讯。
1.2 CAN信号接口设计
信号输出输入关系如下所示:
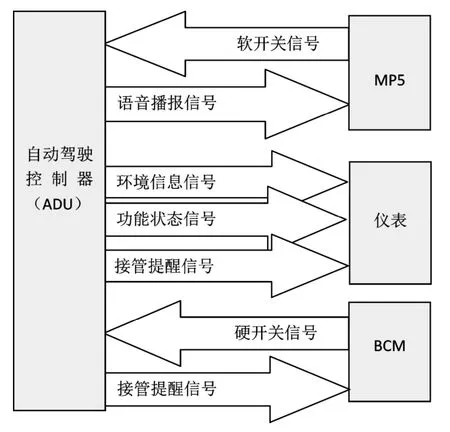
图1 人机交互系统信号接口图
MP5主要将软开关信号发给自动驾驶控制器,并接收自动驾驶控制器的接管提醒,语音播报信息,进行语音播报提醒。
仪表接收控制器的环境信息、功能状态、接管提醒等各种交互信号,是人机交互实现的主要部件。
BCM主要将按键开关信息输入给自动驾驶控制器,并接收自动驾驶控制器的接管提醒信号,在三级报警发出时,驱动安全带震动。
具体的信号定义通过CAN收发矩阵的形式限定,本文不进行详细描述。
2 人机交互主要元素识别
2.1 交互类别设计
交互设计主要包括以下五个方面的信息:
(1)自动驾驶功能当前时刻所处状态:依托状态机,合理设计需要给用户进行交互的状态,通过自动驾驶功能图标和仪表背景颜色的变化,给驾驶员以提示。
(2)将前方道路信息等情况通过语音播报交互给驾驶员。
(3)当自动驾驶系统不满足运行条件时,提前向驾驶员提出接管请求。
(4)将车辆行驶周围的关键环境信息实时显示给驾驶员。
(5)实时车速及交通表示识别结果的显示。
2.2 交互元素识别
为实现上述交互功能,仪表主要设计如下交互元素:
(1)功能指示图标;(2)实时车速显示;(3)本车道最近车辆;(4)道线;(5)换道图标;(6)自车;(7)其他车辆;(8)TSR(交通标识识别)检测车速;(9)文字提示;(10)自车周围辐射状圆圈;(11)声音提醒。
具体元素显示情况如下图所示:
MP5主要交互元素为语音播报,即播报前方道路情况等信息。
座椅震动主要在三级接管报警发出时,给驾驶员提出更多的交互形式,提醒其尽快接管车辆。
3 详细交互方案设计
3.1 自动驾驶功能当前时刻所处状态显示方案
高速公路自动驾驶功能共设计11个大的状态,自动驾驶所处的不同状态主要通过自动驾驶功能图标的颜色来指示。图标样式参见图2中符号1所示的功能状态指示图标。
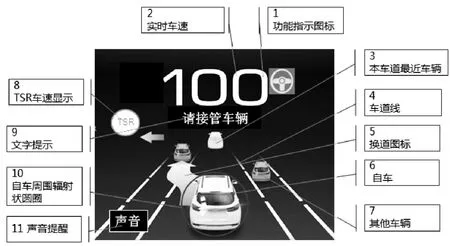
图2 仪表交互元素识别
各状态图标颜色设计如下:

表1 功能指示灯颜色
人机交互功能的设计时,既要考虑尽量清楚地将当前状态交互给驾驶员,显示形式又不能过于复杂,故设计灰色、绿色、蓝色、红色、白色、黄色六种颜色进行功能状态的指示,需要时,结合文字显示,对当前车辆的状态进行明确。
3.2 语音播报和文字显示设计
对于前方道路信息,及系统运行过程中需要驾驶员需要引起驾驶员注意的运行状态,设计语音播报和文字提醒的交互形式。
语音播报通过车辆MP5发出,文字提醒显示位置参考图2。具体设计的语音播报和文字提醒内容主要包括下表中所示内容。主机厂也可根据功能需求,设计更为丰富的提示信息。
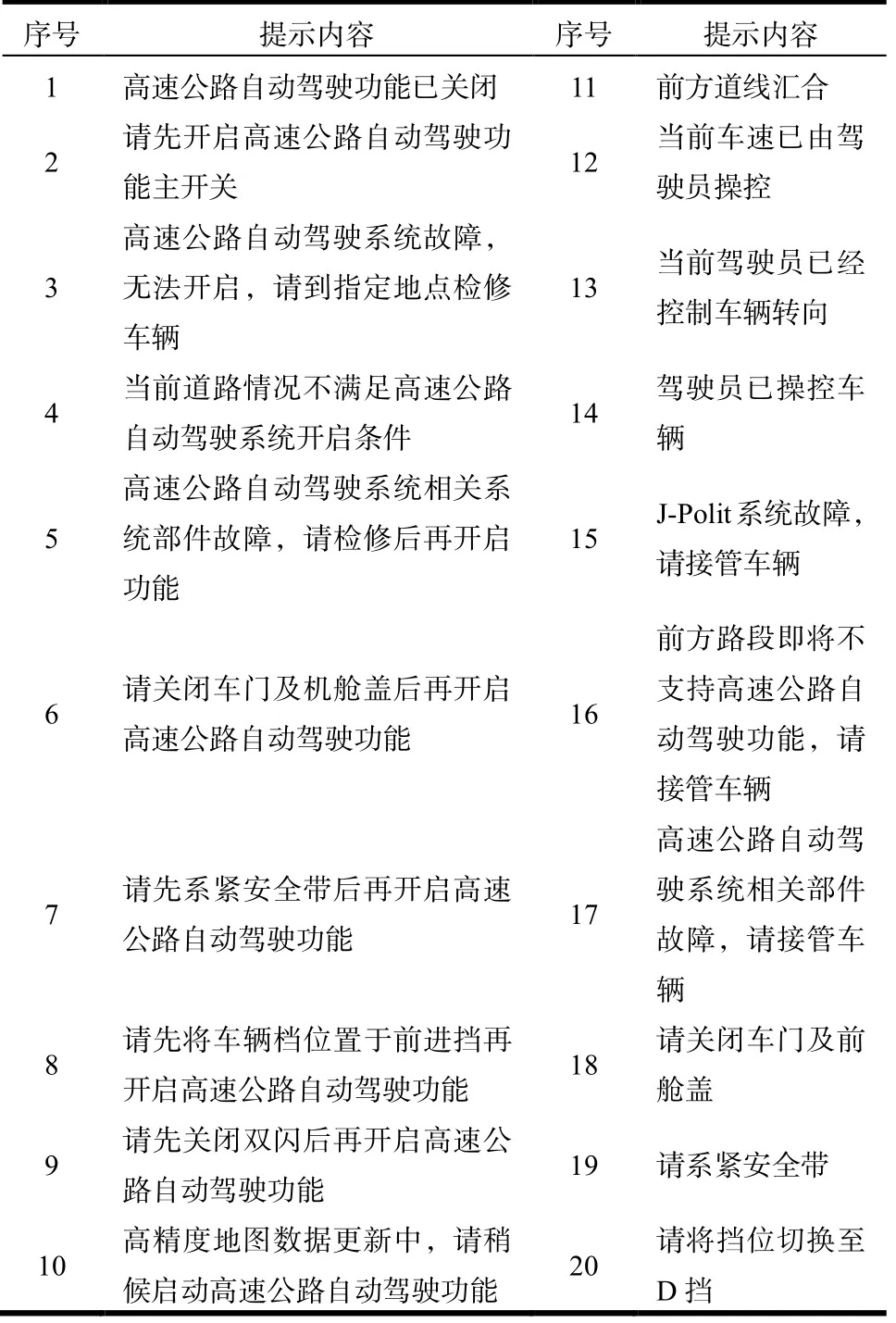
表2 语音播报和文字显示内容
3.3 接管请求的交互设计
高速公路自动驾驶系统在遇到系统不能处理的情况时,会预先向驾驶员提出接管请求,接管请求分为三级报警,三级报警的接管提醒方式设计由缓和到紧急三种不同的方式。
接管产生的原因主要包括以下三类:(1)车辆即将驶出自动驾驶功能设计的ODD范围;(2)自动驾驶相关的传感器、控制器等部件发生故障;(3)车身状态不满足功能正常运行的设定条件,例如车门打开、机舱盖打开、挡位不在前进挡等。
针对以上引发接管的原因,接管请求并不是全部从一级报警开始,而是根据接管原因的紧急程度进行初始报警等级的设定,例如线控制动或线控转向系统通讯故障,系统直接进入三级报警,需要驾驶员尽快接管车辆。
3.4 辆行驶周围的关键环境信息的实时显示
周围环境的显示主要包括车道线和车辆两部分。环境显示模块的工作主要需要解决的问题包括以下四个方面:(1)真实世界环境显示范围及仪表显示像素点设定;(2)真实世界与仪表坐标系的确定;(3)真实世界的车辆坐标道仪表坐标的转换;(4)真实世界道线到仪表坐标下车道线的显示。
3.4.1 真实世界环境显示范围及仪表显示像素点设定
(1)真实世界显示范围:车道线长度显示0~75 m范围内的三车道四条道线信息,当实际探测范围小于75 m时,以实际探测到的距离进行显示。同时显示这一范围内的周围车辆信息。
(2)周围车辆位置显示逻辑:显示范围为Y≤75 m,−8≤X≤8范围内的三车道内车辆数据,仪表ADAS区域的像素点具体范围需要交互设计分组给予确定。仪表按照一定的公式转换后,计算出的像素点在给定范围内时,则显示车辆信息,超出设定的像素点,则不进行显示。
3.4.2 真实世界与仪表世界坐标定义
真实世界以车辆最前端为原点,向前为X轴正向,向右为Y轴正向。仪表以左上角为坐标原点,向右为X轴正向,向下为Y轴正向。
3.4.3 车辆真实坐标到仪表坐标以及真实世界道线到仪表坐标下车道线转换公式的设计
根据真实世界的车辆和道线坐标,考虑显示范围透视效果,进行车辆真实世界X、Y坐标到仪表像素点的确定。由于不同车辆需要反映的真实世界和仪表像素点在每个车型上都有不同的设计,转化公式也不尽相同,转化公式设计完成后需要通过虚拟仿真和实车效果评审进行多轮次的优化,在此不进行设计公式的具体论述。
3.5 实时车速及TSR交通标识识别结果
实时车速根据控制器发出的自车当前实际车速信号驱动,将具体的车速以km/h为单位,显示在仪表上的固定位置。
TSR为交通标识识别信息,其通过前向视觉系统进行识别,并将识别结果通过自动驾驶控制器输出给仪表,仪表将检测到的本车道限速数值显示在TSR图标上。
4 总结
本文从人机交互设计的意义、人机交互系统设计、人机交互元素识别、详细设计方案设计等几个方面,给出了比较完整的高速公路自动驾驶功能人机交互功能的设计方案,对车辆的人机交互设计有比较实用的指导意义。
