基于特征分析的图像式地铁隧道裂缝检测方法研究
2021-09-08李清奇
李清奇
(娄底职业技术学院 土木工程学院,湖南 娄底 417000)
0 引言
随着时代的进步我国在城市化建设方面的投入不断加大,推动了铁路的修建速度使得大量的铁路映入眼帘。在进行铁路的修建过程中对于隧道的施工要求极为严格,为了确保隧道的施工工程质量,减少地铁在隧道中运行时候的出现的安全问题,所以在地铁隧道的施工中引入隧道检测的图像处理技术,是为了能够及时检测隧道中表面出现的裂缝,避免安全事故的发生。交通技术作为我国重要发展技术之一,越来越多的出行方式不断出现在人们的生活中,如:高速铁路、地铁、公路等。在铁路的建设中,隧道的建设能够很好的解决线路的平顺性同时降低环境对线路的影响程度,因此隧道备受人们关注,成为铁路建成中的重要举措之一。随着铁路隧道的快速建成和运营,安全问题就呈现在人们的视线中,在地铁隧道中安全问题是极为重要的,需要对其进行定期的检测以及危害信息的获取处理和反馈。虽然隧道工程在不断的成熟,但在铁路的检测设施以及技术方面仍然处于较落后的趋势,近年来在隧道发生的一系列安全事故让人们注意到了隧道安全这一严重的问题。如根据相关报告了解到的2012年12月2日在日本的某个县城发生的隧道塌方导致多人伤亡;在我国的也出现过类型的事故,由此可见事情的严重性。在隧道中裂缝的出现仍然是一个很大的难题,像固疾一样牢牢的经常出现在隧道中。裂缝作为地铁运营过程中的影响极大的安全隐患,这一安全隐患就需要工作人员在对隧道进行定期的信息采集、处理分析避免出现裂缝。那么本文就针对于此对地铁隧道裂缝检测的方法进行研究。
1 传统检测方法的弊端
从铁路隧道的建成至今,我国所使用的传统隧道裂缝检测技术大多数是以人工检测为主要,利用人工在现场进行实时的设备搭设,技术人员通过肉眼观察或者进行隧道的图片的拍摄,通过所拍摄的照片进行裂缝的查找、地质雷达通过电磁波反射信号进行对裂缝的检测。这些方法虽然可以进行现场的勘察但存在着许多的问题,如:当使用人工肉眼观测时候,如果是在地铁高速运行时候的话,进行检测的人员的人身安全将会受到威胁,并对于隧道内的视线问题将技术实施的难度加大,使得工程变慢不利于人员检测导致裂缝检测效率过低。如果是使用拍照检测的技术方法则会受到拍照光线不均匀、照片失真等的因素影响直接是照片质量不能够达标,增加检测难度降低检测效率[1-3]。对于这两种技术方法来说,存在着十分严重的弊端,对于技术的实施对于人工的依赖太过于过大,对工作人员的技术水平要求也是十分苛刻的,且工作人员的技能水平及素质大不相同,检测出的结果也不一样。这两种技术方法的主观性过于太强,效率也过于低下;对于地质雷达检测方法来说,虽然该方法能够通过不同的反射电磁波进行对裂缝的检测且有着很高精确度、有叫高强度的抗干扰能力等但对于隧道表面的裂缝检测没有很高的效率,只适合于检测结构内部的裂缝。所以这些传统的隧道裂缝检测方法已经不能够很好的满足现代的检测要求了。
2 隧道裂缝检测中图像处理技术原理
2.1 硬件构成
对于隧道的硬件检测系统来说,为了将其作用发挥到最大,就把硬件按照车载的结构进行设计,让硬件检测系统通过一定的速度在隧道中运转,并结合高精确度的耦合器件相机进行精确检测就可以采集到隧道表面的裂缝信息。这种耦合器件相机(CCD)的耦合相机采用光学系统,将光信号转化成视频信号实现高分辨率、高动态情景、高灵敏度等[4]。对于硬件的检测系统来说还包含着其他的器件配件如:编码器。这一配件可以对运行车速进行测试,再通过对相机的采集速度进行调度,确保运行车速和相机的采集速度保持一致。通过这一方法的实施就可以很好的解决图像出现变形的现象,进而确保采集到的图像裂缝信息与实际情况一致。在硬件检测系统中的图像采集卡能够将CCD精确相机捕捉到的视频信息存到图像采集卡中并把采集到的图像进行A/D的转化。对于硬件检测系统中的照明系统来说,可以通过高频稳定的大功率照明设备如LED条形光源,来弥补CCD相机的低光敏性。
2.2 图像处理技术工作原理分析
在隧道裂缝检测中通过CCD相机对隧道表面的信息采集并以图像的形式存储到采集卡以及硬盘中。在存储技术上使用了磁盘阵列技术,能够在实际开展工作储存高分辨率的图像数据时候确保不出现丢包、丢帧、存储失败等问题。最后再连接计算机进行对图像数据的处理得到精确的隧道裂缝信息。
3 隧道裂缝图像处理技术算法设计
3.1 隧道裂缝图像的特点及分类
就目前而言主要将隧道的裂缝分为如图1、图2:横向裂缝、纵向裂缝、网状裂缝、斜向裂缝,这些裂缝类型大都出现在从隧道口进入的方向成直线分布与顶部拱处及其附近。横向裂缝则和纵向裂缝沿着90°进行分布,在隧道的拱线、交断面、岩面交界处出现较多;斜向裂缝和纵向裂缝也会成一定的角度进行分布,通常在隧道的拱腰的中间位置分布较多;网状裂缝则是随机产生,其特点成网络状,通常在隧道的拱部位置出现较多。
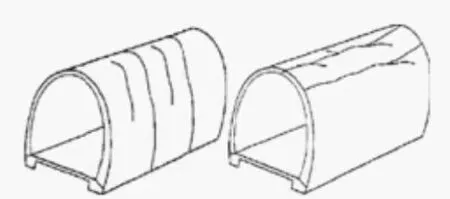
图1 横向裂缝以及纵向裂缝
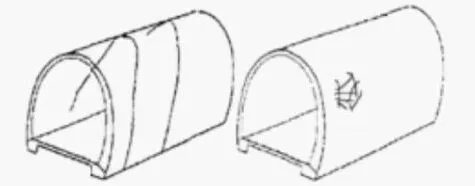
图2 斜向裂缝以及网状裂缝
在对隧道裂缝的图像信息进行设计时通常认为其特点主要体现为裂缝部位相较于背景区更加暗淡,但因为采集设备、环境等的不同因素导致所采集到的隧道图像呈现不一样的特点[5-6]。对于隧道的实际图像特征大致如下所述:
(1)隧道内部空间狭隘,环境复杂存在过多杂音导致在采集图像信息时候存有大量的噪音。
(2)一般裂缝灰度值明显小于背景灰度值。
(3)隧道中采集到的裂缝像素远不足于背景图像的像素总值。
(4)因为隧道中光照不均匀,环境潮湿等因素都会导致采集的图像背景区域的灰度不均,出现裂缝像素点和背景像素点重合的现象,对于后续的图像分割造成影响。
(5)隧道中的裂缝有着一定的方向性。
在进行对裂缝的类别进行分析时候需要把隧道内的复杂环境因素考虑进去并以上述特征结合具有可行性的算法对图像进行处理,把裂缝从背景图像中分离出来。
3.2 图像的灰度变换方法
由于在进行图像信息的采集的时候,经常会出现裂缝的灰度值分布不均的现象并集中在一定的值数范围内,这使得图像难以凸显出裂缝的细节,所以得对采集到的裂缝图像进行灰度的变换,这是保证后续图像处理方法实施的基础步骤。对于图像的灰度主要变化方法有:非线性拉伸、线性拉伸、直方图均衡化,这其中非线性拉伸是说值数和对数的拉伸,而线性拉伸则是指均匀拉伸、分段拉伸以及限幅线性拉伸等。本文接下来则对限幅线性拉伸、非线性拉伸这两种方法进行分析对比研究:限幅线性拉伸。线性拉伸的作用是在进行图像处理时候提升灰度值的动态范围。假设原采集到图像坐标为(x,y),对应的灰度值则为f(x,y),进行拉伸后的灰度值变为g(x,y);这就可以将线性拉伸用函数来进行表示为:g(x,y)=α*f(x,y)+β,这式子中的α代表拉伸系数、α和β的取值就可以从实验中所获得。
倘若最大灰度范围在拉伸前的范围为{fmin,fmax},灰度范围进行拉伸后的取值为{m,n}那么线性拉伸函数的表达式为:g(x,y)=b-a/fmin-fmax[f(x,y)-fmin]+a;限幅线性拉伸的灰度值限定范围为{m,n},对于小于限定值m的灰度值都为m,大于限定值n的灰度值为n,那么在对其线性拉伸时候的函数式子为:
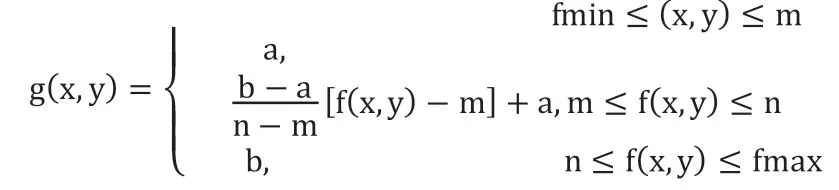
变换函数则如图3所示:

图3 限幅线性拉伸变换函数
非线性拉伸。通过非线性函数进行对原采集的图像进行拉伸,常见的拉伸方法为指对数拉伸。指数拉伸能够扩大高亮度区域表达式为:g(x,y)=bc[f(x,y)-a],该表达式中a代表曲线开始的位置,c代表曲线的变化率,其指数变换函数如图4所示。
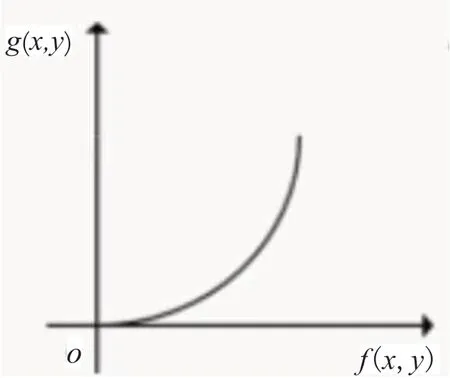
图4 指数拉伸函数
对数拉伸能够扩展灰度较低的区域,与此同时将高灰度区域进行压缩,从而加强图像的细节程度,其表达式如下:

该表达式中a的取值按照实验的要求进行取值,通常a的取值一般为e,所以对上式子改写后得到:

改写后式子中C表示尺度比例系数(可进行调节)。若f(x,y)+1的取值不为0,那么对数的变换函数如图5所示;
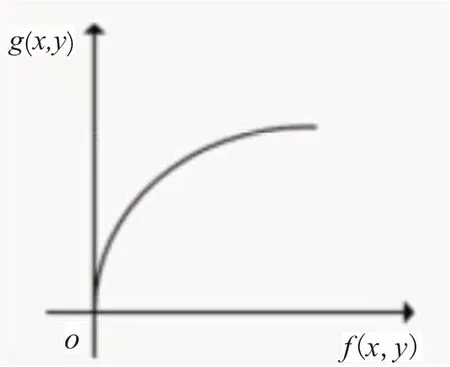
图5 对数变换函数
3.3 对隧道裂缝图像进行分割处理
在进行所采集到的图像分割时候所遵守的就是均匀原则,把所采集到的经过一系统处理后的图像分割成多个有不同意义的图像,并且每个分割后的图像都需要符合某个特性。在进行隧道裂缝图像处理时候图像的分割算法有:生长分割技术、阀值分割技术等就目前使用最为广泛的则当属于阀值分割技术。对于阀值T来说,对采集到的图像的直方图进行分析可以得出确切的值。当一个图像中只存有背景及目标这两个因素时候,直方图则可做为双峰图来进行分析,并将两个峰之间的最低点做欸分割阀值。还有一种情况相对于进行起来过于复杂那就是裂缝衬砌图像,这种图像的直方图都只呈现出单峰形态,这种情况只利用直方图则很难确定精确的分割阀值。在对裂缝图像进行分割时候可将两种方法分别进行计算对比,这两种方法都能很好的将所采集到的图像中的裂缝以及背景图像区分开来,能够达到预期的效果。
4 结语
本文对图像处理技术中的图像的灰度变换方法以及图像分割法进行分析阐述。对于在进行勘测时候可根据实际情况来进行合理的选择。
