电气传动系统的智能控制研究
2021-09-08郑金达
郑金达
(丘引信息技术(天津)有限责任公司,天津 300202)
作为现代科学技术的重要产物之一,智能控制系统对提升电气传动系统运行的质量和效率具有十分重要的作用,智能控制系统通过模拟人类大脑思维的分析模式对电气传动系统进行智能化控制调整,摆脱了传统控制系统依托控制对象模型设计的弊端,实现了对电气传动系统参数的非线性因素反应以及参数变化反应,是电气传动系统未来发展的主要趋势。然而,当前我国对电气传动系统中智能控制系统的应用尚处于发展阶段,对促进电气传动系统实现智能化的稳定运行尚存在一定的难度。因此,深入研究电气传动系统的智能控制对推动电气传动系统优化发展,提供全面的技术和支撑保障具有十分重要的意义。
1 电气传动设备与智能控制系统的基本概念
1.1 电气传动系统
电气传动系统由四部分组成:电动机、控制设备、传动设备与电源。主要工作流程为:电源通过电磁感应装置为整个系统提供电力,电力通过转化成机械力来带动传动设备运转,传动设备与控制设备一同工作,按照设定好的机械操作做着持续性的生产与加工,最终完成生产工艺任务。传统的电气传动系统依靠人力或是自动化程序来控制,现如今随着技术的发展,逐渐兴起的智能化控制技术也不断地应用在电气传动系统上,大大增加了生产效率与生产安全,减少了企业的生产成本和运营成本。
1.2 智能控制系统
智能控制技术是目前很火热的一个技术,随着科学发展的进步,逐步应用于各种行业,比如制造业、通信业、服务业等。智能控制系统有几大组成模块:信息处理模块、设备控制模块、感应器、后台服务器与电源装置。具体来说:智能控制系统通过后台服务器对应用场景收集数据并分析,然后提出相应的操作指令向终端机器内部的信息处理模块发送,信息处理模块得到指令后,操纵设备控制模块做出对应的机械化动作,操作过程中由各种感应器装置继续收集信息并传送到后台服务器。智能控制系统与自动化控制系统的不同之处在于:自动化控制系统是由人事前输入相关操作指令,机器会按照指令自动的机械化运转,一旦出现突发情况,机器就会出现停滞的现象;智能控制系统不仅拥有自动化控制系统的所有功能,还可以由后台服务器做出分析计算,并自由灵活地处理各种突发情况,保证了生产的流畅性与合理性。
2 智能控制系统的主要控制方式
2.1 模糊控制
模糊控制是一种非线性控制,属于智能控制系统,其中最主要的特点就是拥有系统化理论和大量实践背景。系统化理论方面:模糊控制系统的基本机构框图如图1所示,从图中可以看出,模糊控制有三个组成部分:模糊产生器、模糊推理机和消除模糊器。模糊产生器接收的是实践中技术人员的操作方式和技巧,通过模糊集合内存储的相关专家的知识,将混合数据传到模糊推理机中,按照一定的生产规则,做出合理的模糊指令,由消除模糊器解释并控制机器做出符合实际操作情况的、模仿技术人员的机械动作。模糊控制可以有效地减少人员参与,减轻企业的技术人员数量,缓解了企业用人紧张的问题。

图1 模糊控制系统的基本机构框图
大量实践背景方面:由于模糊控制应用范围较广,典型的例子比如:家用电器设备中的模糊洗衣机、微波炉、吸尘器等;工业控制领域中的水净化装置、水泥炉等;其他方面的自动扶梯、模糊机器人等,足以见得这种智能控制算法的简单和易适应性。模糊控制算法不需要精确的数学模型、不需要繁琐的语言控制规则,只需要收集技术人员的动作和经验,进行简单的计算就可以完成工作,加快了企业的生产效率,输入的各项信息越详细,模糊智能控制的效果就会越好。对于那些有着充足实践经验的企业来说,模糊控制可以帮助他们提高自身的企业竞争力。
2.2 单神经元自适应控制器
单神经元自适应控制器也是一种非线性控制,属于智能控制范畴,由单神经元组成。现如今神经网络的发展使得智能控制系统变得越发高效,因为单神经元自适应控制器的自我学习能力使得它逐渐成为智能控制系统的主要一员。由于单神经元结构简单和响应速度快的特点,可以解决电力系统中较为复杂的问题,虽然其内存较一般的计算机要小一些,但是对企业来说,综合考虑单神经元自适应控制器的成本、控制效果和运行速度,已经完全可以对单神经元自适应控制器做完善的科学研究和市场应用。
单神经元自适应控制器原理如图2所示,输入的数据通过状态转化与学习规则的影响,使得知识结构逐步适应周围环境的变化。在前期的学习过程中,神经元内部的连接权值不断被修改,等到权值经过不断的调整逐渐趋于稳定时,代表单神经元自适应控制器学习完毕,进入到后期的工作过程,这时连接权值将固定不变,源源不断地把输入数据计算并输出。图2选择的是有监督的Hebb学习规则,它结合了无监督的Hebb学习规则和有监督的Delta学习规则:
输入为r,输出为y,误差为e=r-y,控制信号为u;
三个状态量x1(k)=e(k),
神经元产生的控制信号为:

其中,wi(k)为对应的xi(k)的权系数,k为神经元的比例系数,图2以这种无监督学习规则和有监督学习规则结合的方式,组成了单神经元自适应控制器,以解决复杂问题。
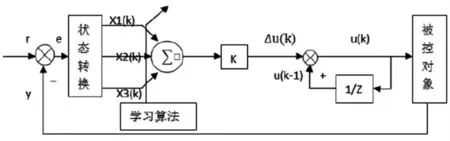
图2 单神经元自适应控制器原理
3 电气传动系统对智能控制方法的有效运用
3.1 模糊控制在电气传动系统的应用
在电力企业的应用中,复杂的电气传动工作较多,导致输入数据较杂,因此在企业实际应用前,应该着手建立一个规则化数据库,数据库内整理着严谨的数据对象,并把技术人员的操作精细化,再将数据输入到模糊控制系统中,通过模糊控制系统中的数据变换过程,将消除模糊化的操作实施到机械上,一般来说模糊控制系统较多安装在传动系统的发电机、电动机等设备中,用来帮助原本就自带一定自动控制能力的设备运转。
比如在交流电调速系统中运用模糊控制,输入的系统变量要经过调整,改变相应的误差和误差控制率,利用模糊PI技术将系统参数调整完毕后,可以实现精确的智能化控制,输出控制量比传统的电气传动控制要更加地准确。
3.2 单神经元自适应控制器在电气传动系统的应用
单神经元自适应控制器有自我学习的能力,但是没有足够的数据,神经网络也无法学习到令人满意的程度,因此企业在应用该项技术的时候,需要事先收集足够的操作数据,满足单神经元自学习的数据基础,再配合生物学知识和物理学知识,在电气传动系统运作时,由单神经元自适应控制器对各种电气设备做运行速度的调节,并在不断的自适应中,计算达到有效控制电气系统的工作强度。一般来说,单神经元自适应控制器主要应用在电气传动系统的优化设计和故障诊断方面,保证物尽其用,效果突出。
单神经元自适应控制器的特点保证了系统鲁棒性的提高,因为其控制系统转速、调节误差的优点,使得单神经元相当于PID调节器,可以代替线性调节器的局限性,实现了系统动态性能的平稳饱和。
3.3 企业应用智能控制技术在电气传动系统的优点
首先,保证了企业生产的安全性。电气传动系统在传统控制中需要人为的调节电源,一旦出现电路短路现象,会造成企业的人员伤亡和财产损失,而智能控制系统解决了这一问题;其次,保证了企业设备的生产效率。智能控制系统拥有了自动化控制系统的所有功能,并且做到了代替人脑的机械控制,最主要的是可以达到调整完善电气传动系统的目的,这是人力不能完成的;最后,降低了企业的生产成本:由于智能控制系统改变了电气传动系统的控制结构,在生产设备的简化、操作步骤的精简、参数调节的动态化、传输过程的准确化这几个方面降低了企业的资金投入,节省的资金可以投入到更进一步的智能控制技术研发中。
3.4 智能控制系统与电气传动系统的不足和未来发展
智能控制技术在结构层面、学习算法上已经成型,如果随意改动控制器硬件设备将会影响算法的运行和工作效率;部分智能控制系统的硬件设备需要高性能,否则难以带动,影响了企业的生产效率,也在一定程度上增加了设备成本。未来智能控制系统应当朝着减少设备成本、增加算法耦合性的方向研发,这样才可以为企业带来工作效率的提高、人力成本的减少和企业竞争力的增加。
4 结束语
综上所述,智能控制与传统控制系统相比对提升电气传动系统运行的质量和效率具有突出的作用,不仅能够实现对电气传动系统有效控制,还能够降低人为操作环节,有效规避人为因素的风险。电力企业要深入了解电气传动系统和智能控制系统的基本概念,通过深入研究智能控制系统的主要控制方式,掌握智能控制在电气传动系统的有效应用方法,并在摸索应用过程中,不断地发现问题、分析问题和解决问题,进而为智能控制技术在电气传动系统中的有效运用奠定坚实的技术基础,为推动电力系统的可持续性发展提供创新型技术保障。
