基于“BIM+GIS”的运营城市轨道交通安全监测与评估
2021-09-08罗海涛
罗海涛
(广州地铁设计研究院股份有限公司,广州 510010)
1 概述
随着智慧城市建设的快速推进,作为城市基础配套设施的轨道交通也将加入其行列[1]。积极打造城市轨道交通运营监测与评估一体化平台,有助于实现城市轨道交通运营维护阶段的标准化、信息化及智能化管理。BIM技术利用轨道交通的几何信息、物理特性及功能特性等数据建立三维模型,可实现对模型内部信息的存储和分析管理[2-3],但其宏观建模能力较差,模型不包含地理空间信息。GIS技术一般用于处理海量地理空间信息数据,适用于城市轨道交通的总体表达,将其与BIM技术相结合,有望利用各自的优势构建智能监测平台。已有许多学者进行相关研究,陈光等通过定义一体化三维空间数据模型,构建轨道交通“GIS+BIM”三维数字基础空间框架[4-5];李虎等利用“BIM+GIS”技术,提出搭建城市轨道交通建设管理智慧平台的思路[6];夏永俊等结合BIM和3DGIS各自的特点,提出了两者结合应用的整套技术路线并在轨道交通建设中进行应用[7];王孟钧等从设计界面、虚拟建造和协同平台等三个维度对BIM和GIS技术在城市轨道交通中的应用进行分析[8]。以下结合运营城市轨道交通安全监测与评估的需求,分析利用“BIM+GIS”技术通过三维实景建模实现时空一体化成果表达。
2 城市轨道交通三维实景模型构建
将“BIM+GIS”技术应用于运营城市轨道交通结构监测与评估中,需要构建地面和地下空间的城市轨道交通三维实景模型。主要建模手段包括图纸翻模、倾斜摄影建模、三维地质建模及三维激光扫描建模等。
(1)图纸翻模
图纸翻模是指利用已有的二维图纸等基础资料结合相应的补充资料,根据现有的工艺流程和技术标准生成轨道交通构筑物三维模型数据。主要基础资料有设计施工图、数字地形图和正射影像图等基础测绘成果,需要补充完善的数据包括轨道交通构筑物表面的纹理和属性等信息。在外业拍照采集纹理信息时,地铁站内部的每个固定设施都必须采集,并需在图纸上标明相应的位置;为保证后续纹理处理时对构筑物整体结构的把握,应尽量在不同的方向进行拍摄,以获取一定数量的全貌及细节照片。资料完备以后即可进行三维模型数据的生产,此时需要以最小单位分块的建模单元采用相应的软件进行制作,同时给每个三维数据模型赋予属性信息。三维模型建模完成之后需要进行质检与提交,同时为适应不同平台的浏览环境,还需进行效果美化,使之性能和视觉表现满足需求。图1为利用图纸翻模技术进行某地铁站三维实景建模的示例。
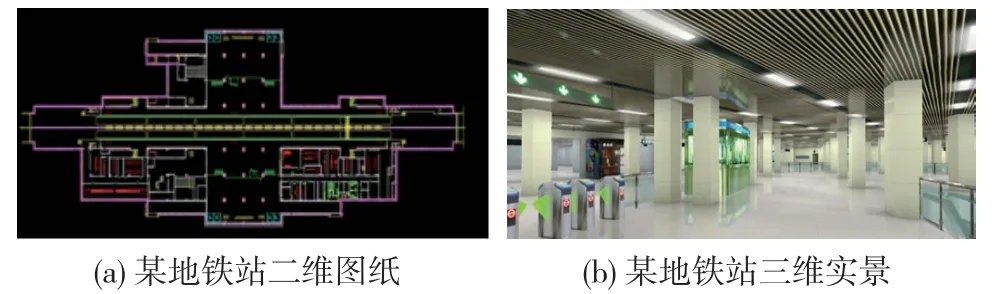
图1 图纸翻模地铁站三维实景建模示例
(2)倾斜摄影建模
利用携带五镜头倾斜摄影相机的飞机沿轨道交通沿线进行拍摄,可以获取城市轨道交通沿线地面空间的三维实景模型[9-11]。倾斜摄影三维建模工作主要分为外业数据采集与内业数据处理两部分。外业数据采集包括现场踏勘、资料收集、航空拍摄及像控点测量等工作。在展开飞行之前,需要向主管部门进行空域申请;航空摄影数据采集后,需进行保密审查。为提高数据采集效率,一般采用直升机作为主要飞行平台,同时采用无人机对重点车站、车辆段等部位进行补充拍摄。航线布设应从高效、经济的原则出发,并综合考虑设备性能、地形、地势、高差、沿线建筑物高度、摄区形状、航高、航向重叠度、旁向重叠度和航行协调等一系列要素。外业数据采集中,首先应根据相关规范进行像控点的布设,通过RTK方式直接测定其WGS84下的三维坐标,为与当地坐标系统统一,需联测3个以上已知控制点,并进行七参数转换。外业工作完成以后,采用Pix4D、smart3D及Photoscan等内业数据处理软件,对原始的影像数据进行预处理,再通过几何校正和联合平差等处理流程生成密集点云数据,并以此生成基于真实影像纹理的三维模型,同时可以按需求完成数字正射影像图和数字表面模型的制作。图2为利用倾斜摄影技术进行轨道交通地面建筑物三维建模示例。

图2 轨道交通地面空间倾斜摄影三维建模示例
(3)三维地质建模
三维地质建模既是满足三维地下空间模型构建的现势需要,又是开展地质空间分析、地质现象解释及地下空间开发利用等的基础,对于城市轨道交通的建设与维护具有重要作用。通过对地质现象进行抽象化处理,再利用建模算法模拟出地质模型数据,最终以三维可视化的形式表达[12]。在进行三维地质建模时,采用空间数据模型大致可分为面元模型、体元模型和混合模型。建模方法上,多利用多源数据集合展开,如实际钻探过程中获得的勘探数据,地震监测中收集到的地震波数据以及利用X光、扫描仪等方式收集得到的地质断面数据等。目前,常用的三维地质建模软件有Jewelsuite、Petrel、Pumaflow及MapGIS等,图3为利用三维地质建模技术构建的轨道交通沿线地质模型。

图3 三维地质模型
(4)三维激光扫描建模
三维激光扫描系统作为一种新型综合测量技术,可以快速获取海量点云数据,用于城市轨道交通隧道结构的三维建模。一般地铁隧道空间狭长,在利用三维激光扫描仪采集数据时,需根据隧道内部的实际情况确定测站数量和仪器架设位置,以保障点云精度及扫描覆盖率。为便于多测站点云数据的匹配拼接,需要在隧道管片布设特征明显的球形靶标,并保证相邻测站间至少有3个共用靶标点,以实现点云配准。
在实际数据采集时,设置扫描范围、角度及分辨率等信息即可完成测站上隧道结构扫描。在数据处理方面,首先,需要进行点云去噪和平滑,将一些明显偏离扫描对象的孤立点删除,并对原始点云数据进行压缩、重采样,以提高后期建模效率;其次,需根据公共靶标点位置进行点云数据进行拼接,点云拼接之后可能涉及坐标转换问题;最后,通过构建三角网模型,轮廓线提取,曲面拟合以及贴附纹理等手段,将离散的点云数据生成隧道表面模型。图4为利用三维激光扫描技术进行隧道结构三维建模的示例。

图4 三维激光点云隧道结构建模
利用多种方法建立运营城市轨道交通沿线地面地下的三维实景模型,为实现后期监测成果的一体化表达,需要选用合适的三维地理信息系统对各模型进行整合及统一管理,常见的平台有ArcGIS、Skyline及SuperMap等。在进行模型的整合时,需要重点注意模型的多分辨率处理及轻量化、地形修改与套合及数据信息的交互等。
3 运营城市轨道交通安全监测与评估
(1)工程规划期的运营隧道结构安全评估
运营城市轨道交通附近经常会有基坑开挖工程,或者新建轨道交通线路穿越既有路线,其施工会改变隧道结构的应力场和变形场,影响既有城市轨道交通的运营和安全。为降低既有隧道结构的安全风险,在工程的前期规划阶段,需要进行定性及定量的评估,预测其对隧道结构的影响程度,为安全合理的施工提供指导[13]。一般采用有限元法展开模拟分析,常用的分析软件有ANSYS、MIDAS GTS等。首先,进行现场地形地貌调查,调查场地周边地面和地下的建筑物、管线分布情况,收集场地周边的三维地质和水文资料,确定各土层的计算力学参数,为进行三维动态施工数值模拟地层参数取值提供依据;然后,根据图纸资料确定拟挖基坑与既有隧道结构的三维立体关系,为建立相应的三维模型奠定基础;最后,根据已有的基坑开挖施工方案,结合地铁隧道结构的走向、高程变化等设计参数建立三维大型数值计算模型,计算基坑开挖各工况阶段隧道结构的内力、变形变化规律,为实际的施工过程提供指导,为相应的安全监测方案提供参考。
(2)工程施工期的运营隧道结构安全监测
在工程的施工期间,为保证运营隧道结构的安全,需要对隧道结构进行安全监测,其主要内容包括沉降、位移、收敛、裂缝、渗水量、应力应变等。传统的监测方法以人工监测为主,效率较低。近年来,监测手段朝着自动化、智能化的方向发展,所采用的仪器设备包括三维激光扫描仪、测量机器人、静力水准系统以及裂缝计等[14]。三维激光扫描仪的作用是进行施工前现状确认,一般选用移动式三维激光扫描系统沿轨道进行连续扫描,以获取隧道结构的几何参数,断面尺寸以及渗水、掉块、错台、裂缝等结构病害信息。测量机器人用来进行沉降、位移及收敛量等的自动化监测,在距离基坑施工较远的稳定区域布设基准点,以提供监测的起算数据;在受基坑施工影响的隧道区域按一定的间隔布设监测断面和监测点,测量机器人在监测程序的控制下定期自动观测各监测点并计算获得相应的变形量。静力水准系统主要部署在隧道结构重点关注区域并进行沉降自动化监测,作为测量机器人沉降监测结果的进一步检验。
(3)轨道交通保护区内违规作业巡检
为确保城市轨道交通的安全运营,一般会设置城市轨道交通控制保护区,在保护区内施工作业需要得到主管部门的批准。未经批准的开挖、钻探等违规作业会给地铁设施的安全带来了极大威胁,故有必要定期对保护区进行巡检,及时发现违规作业风险因素并第一时间预警与处置。选择合适的无人机平台搭载成像传感器,沿地铁线路快速采集地面影像,在坐标转换、几何纠正、影像拼接及特征提取等图像预处理的基础上,采用机器学习的方法对风险源样本数据集进行训练,以实现地铁保护区内违规作业目标的自动识别。利用无人机技术结合人工智能可减少巡检的人力成本,提高工作效率,实现全天候按需巡检。
4 时空一体化监测成果表达
时空一体化监测成果表达以地面、地下的三维实景模型为框架,选择或构建合适的三维地理信息系统,对运营城市轨道交通监测与评估信息的成果进行表达和发布,以实现运营城市轨道交通监测和保护工作的标准化与信息化管理。
(1)实时监控与三维实景融合
三维视频融合技术通过把多个摄像头视频序列与相应的三维实景场景进行匹配和融合,生成一个基于三维实景模型的动态虚拟场景,以三维地理信息系统平台为依托,实现视频的精准定位和时空动态分析[15]。三维视频融合监控涉及的关键技术主要有视频监控点位置规划、图象重叠区域的拼接及三维模型与视频画面融合。视频监控的融合质量与每个摄像头的位置布局息息相关,各摄像头监控画面需设置合理的重叠度,即保证拼接和画面有合理过渡又避免浪费,并注意调整摄像头之间的距离来降低图像变形。在进行图像重叠区域拼接时,可通过对三维实景模型进行编辑修改来实现融合拼接;选择参照物时需从形状、颜色及位置等因素来考虑实现更快更准的拼接。三维实景模型与视频画面的融合是将视频画面进行三维模型的贴图,由于视频拍摄为透视图,需要将其转化为轴侧图。在某邻近地铁隧道的基坑开挖监控中,将摄像头的视场、焦距、画幅等参数输入系统,计算得到摄像头的最佳安装位置,同时通过多摄像头视频流拼接技术将多个摄像头视频流影像动态叠加到倾斜摄影模型上。图5为实时监控与三维实景融合的示例。

图5 实时监控与三维实景融合示例
(2)安全监测数据多维显示
在城市轨道交通运营阶段进行安全监测,以地铁隧道结构为保护对象,以邻近地铁施工的非地铁建设项目为监管对象,结合真实的地铁三维实景数据,实现城市轨道交通既有结构监测信息的成果表达和发布,实现主体结构、周边环境等在时间域及空间域上的信息表达。以隧道结构沉降监测为例(见图6),为方便用户查看监测数据的差异、变化量,以及进行趋势预测,在三维地理信息系统平台可进行隧道管片信息的查询定位,对隧道管片上的监测点的基本信息和监测数据进行立体显示,同时支持采用热力图的形式来进行监测数据的显示。为方便数据的自动收集、录入、分析及成图,系统还可支持监测传感器的直接接入,对于变化速率和累积变化量超限的监测点应及时报警。

图6 隧道沉降监测数据多维显示
(3)风险源图像与地图匹配
无人机沿城市轨道交通控制保护区拍摄,利用机器学习识别威胁地铁隧道安全的风险源时,可将风险源图像与地理信息系统的地图相匹配,制作风险源专题地图并进行展示预警。欲使无人机采集的风险源影像与GIS地图匹配,需要知道至少1个点的坐标、航高以及航向角信息。根据航高可以计算航摄比例,即影像中一个像素所对应的实际距离,再根据某已知点的坐标即可将影像移动到地理信息系统坐标系对应的位置,最后利用航向角信息对影像进行旋转即可实现风险源影像与GIS地图的匹配。其中,某已知点坐标可根据无人机飞行时的位置和姿态信息进行投影转换为影像中心点的坐标。图7为风险源影像与GIS地图相匹配的示例。
5 结语
通过“BIM+GIS”技术,在三维实景模型的基础上,选用合适的地理信息系统建立轨道交通工程智能监测平台,将受邻近工程影响的运营轨道交通的安全评估、结构监测及保护区巡检等数据进行统一,可实现轨道交通运营维护的智能高效,降低运营成本。进一步实现整个城市轨道交通的数字化、信息化及智能化,推动智慧交通的建设和发展。
