基于相对量测的分布式导弹协同定位算法
2021-09-08谷琼琼李英博
王 曼, 谷琼琼, 李英博, 刘 辉, 陈 琦
(上海无线电设备研究所,上海 201109)
0 引言
武器系统多导弹间通过共享弹间信息和分工合作的方式可以完成更高难度、更高精度、更高密度的攻击和拦截任务,以应对瞬息万变的战场环境[1-4]。分布式协同制导是未来制导领域的重要发展方向。
分布式协同制导中如何实现高精度协同定位是其面临的最大挑战。在无法保证各导弹全连通、可通信和时间同步的情况下,精确地处理各导弹估计信息之间的相关性和耦合问题是提高定位精度的重要保障。如果忽略各导弹间的相关性,在独立性条件下进行融合估计,或者互协方差估计不准确,将导致融合估计算法发散。明尼苏达大学ROUMELIOTIS 团队[5-6]基于卡尔曼滤波对机器人协同定位理论开展了一系列的研究工作,分析了基于卡尔曼滤波协同定位算法的定位误差并证明了误差的有界性。HUANG 等[7]探讨了基于扩展卡尔曼滤波(extended Kalman filter,EKF)的协同定位算法估计的一致性问题,指出误差状态系统模型具有比实际非线性系统更高维的可观测子空间,这将导致在没有可用信息时,EKF方法中协方差的估计将不合理地减少,最终导致估计的不一致。空空导弹研究院的花文华[8]和何金刚[9]基于EKF 完成了视线角度量测下的协同滤波器的设计,增加了系统的可观测性,完成了双导弹系统的协同仿真。JULIER 等[10]提出了协方差交叉(covariance intersection,CI)信息融合方法,为协方差未知情况下的信息融合提供了一种解决办法。 在此基础上,CARRILLO-ARCE等[11]提出了基于协方差交叉算法的分布式多机器人协同定位算法,以降低信息处理和通信的复杂度。
本文从提高导弹协同制导精度出发,研究多导弹间协同定位算法。针对EKF 算法互协方差计算困难的问题,提出一种基于协方差交叉算法的分布式多导弹间信息融合和协同定位方法。通过建立多导弹状态和量测模型,分析协方差交叉算法的误差精度,仿真验证该算法应用于导弹协同定位的可行性。
1 数学建模
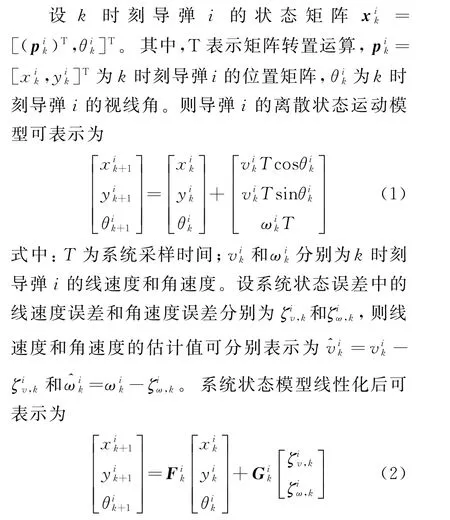
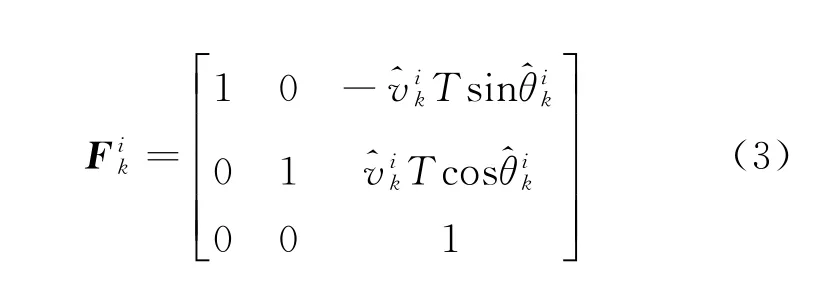
考虑二阶多导弹系统,针对二维平面内导弹的运动,建立弹目相对运动关系,如图1所示。图中,M i表示导弹i,Ta表示目标,v i表示导弹i的速度矢量,θi表示导弹i的视线角。

图1 二维平面内弹目相对运动关系
其中

多导弹间正常通信是保证多导弹系统协同控制的重要前提。导弹间的通信可采用拓扑图来描述。根据通信数据的流向可分为有向拓扑图和无向拓扑图,分别表示导弹单方面接收消息和弹间相互通信。本文所适用的弹间通信拓扑连接如图2所示。该拓扑连接可由无向图表示为g={ε,V}。其中,ε⊆V×V表示网络的连接边,V={1,2,…,N}表示N个参与协同的导弹节点。

图2 弹间通信拓扑连接图
2 协同定位算法
2.1 协方差交叉算法及精度分析
对带未知互协方差和有色量测噪声的两传感器a和b的系统,设两个传感器对系统状态的估计及其协方差阵分别为{^a,P aa},{^b,P bb},互协方差P ab未知。根据协方差交叉算法对上述两个估计状态进行融合,以得到系统更精确的状态估计。融合后状态估计和协方差阵记为{^c,P cc},根据协方差交叉算法,其计算公式为

式中:tr(·)表示矩阵的迹。该算法避免了计算互协方差这一计算量极大的步骤,大大降低了计算复杂度。但该算法适用的前提是融合估计的精度能满足要求。
2.2 基于协方差交叉的协同定位算法
基于协方差交叉的分布式协同定位过程中,
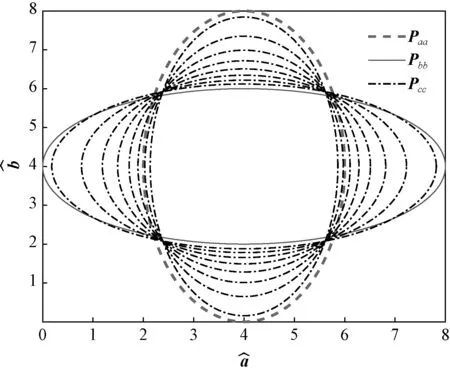
图3 滤波器协方差椭圆

邻弹j将估计得到的导弹i的状态和协方差

由2.1节可知,该多量测信息加权融合的协方差交叉算法估计结果具有有界误差上界,且在每一次相对量测中计算和通信复杂度均为线性,算法对量测信息的同步性没有严格要求,能够处理异步通信情况。
3 仿真及结果分析
在MATLAB中建立协同定位系统模型,仿真条件设置为:导弹及目标位于同一平面,导弹枚数N=4,导弹速度v=200 m/s,4枚导弹随机分布在距离目标约8 km 处,拓扑结构如图2所示。导弹间的量测噪声ξijk=[0,1,0.2]T,噪声服从高斯分布。分别采用单独导航定位(single localization,SL)算法、集中式扩展卡尔曼滤波(centralized extended Kalman filter,CEKF)算法以及本文所提CI算法对4枚导弹的分布式协同定位情况进行仿真。距离估计的均方根误差计算公式为

各算法定位的均方根误差曲线如图4所示。
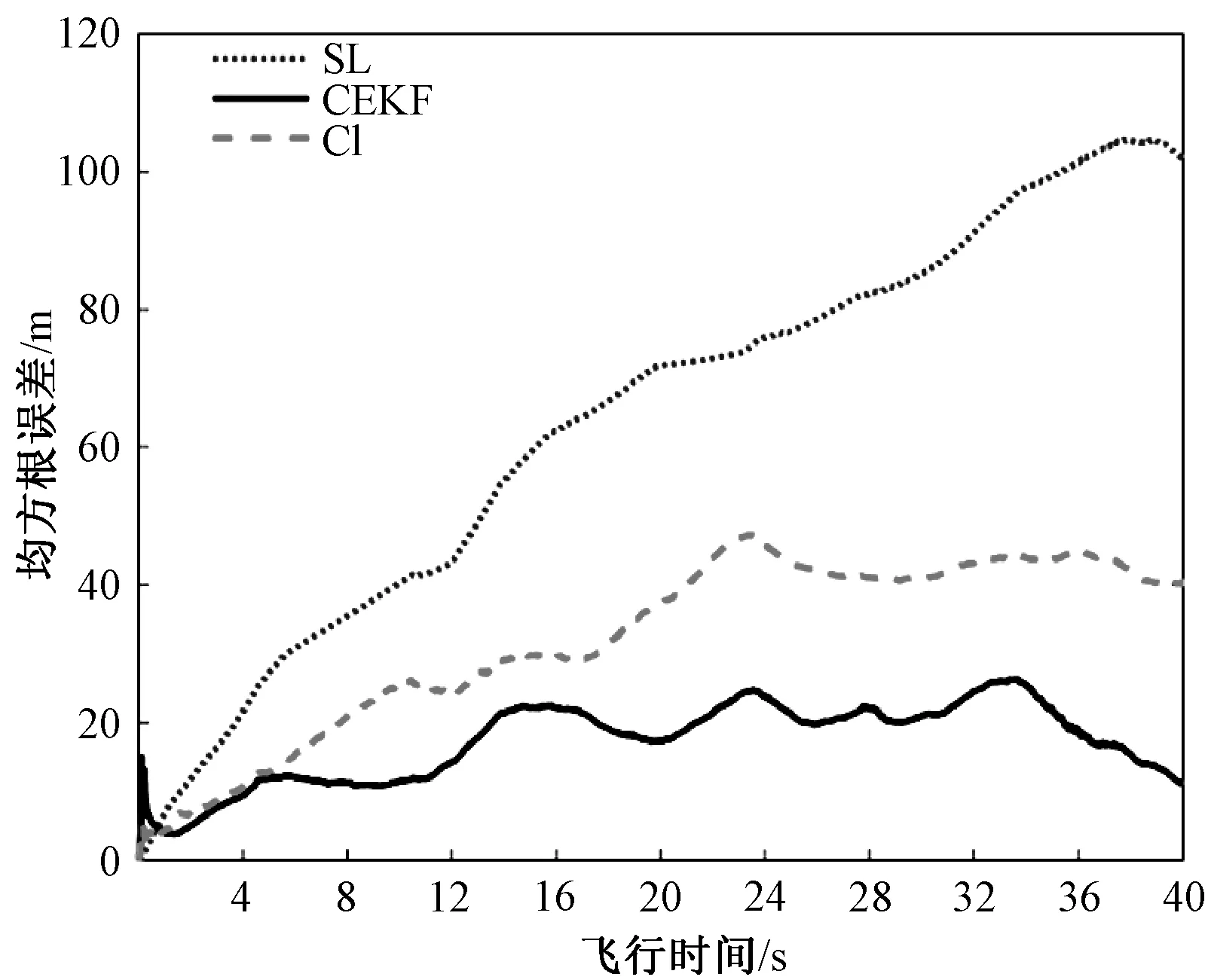
图4 各算法定位均方根误差曲线
由图4可知,算法在网络连通情况下,基于CI算法的协同定位精度低于CEKF算法,但是相对于SL算法,该算法的定位精度大大提高。综合考虑其计算量小,通信量少,对系统通信要求低等优点,CI算法在工程应用中用途甚广。
4 结论
本文基于多导弹量测信息共享的情况,提出了一种基于协方差交叉的分布式导弹协同定位算法,分析了该算法估计误差的有界性。相比于SL算法,该算法提高了导弹的定位精度。相比于CEKF算法,该算法计算量小,通信量少,且支持异步通信,能更好地适应导弹应用场景。