传感器技术在杨氏模量测量中的研究与实践*
2021-09-04余剑敏
余剑敏 肖 楠
(1九江学院理学院/江西省微结构功能材料重点实验室;2九江学院理学院微电子科学与工程 江西九江 332005)
杨氏弹性模量是表征固体材料抵抗形变能力的重要的物理量,是生产、科研中选取材料的重要依据.大学物理实验中一个重要的实验就是拉伸法测金属丝的杨氏模量.在实验时通常是采用光杠杆法测出金属丝的微小形变再利用胡克定律计算出金属丝的杨氏模量,但是该方法在测量时非常容易造成较大的人为误差且操作相对复杂.该自制智能杨氏模量测量仪采用位移传感器对金属丝的受力形变进行测量,采用力传感器对拉力进行监测,再将两个传感器的数据传入数据采集界面,通过内置的算法自动计算出该金属丝的杨氏模量.该方法测量杨氏模量原理简单,操作方便、快捷.
1 杨氏模量的定义
假设对一条长度为L、横截面积为S的金属丝施加一个沿长度方向的拉力F,该金属丝产生的形变为ΔL.F/S叫做正应力,是单位截面积的金属所受到的力;ΔL/L叫做线应变,是单位长度的金属丝对应的伸长量.在弹性范围内,由胡克可知物体的正应力与线应变成正比:
F /S = YΔL /L
(1)
比例系数Y为杨氏弹性模量.式中F、L、S都比较容易测量,但金属丝的形变ΔL的变化很小,不能用常规的测量仪器进行测量.采用CW-141型容栅测微计对微小伸长量ΔL进行测量.
2 实验装置
自制智能杨氏模量测量仪实物如图1所示,仪器结构如图2所示,分为上下两部分.上半部分是数据输入采集系统、固定的立柱以及待测金属丝.数据输入采集系统可以输入数据以控制拉力的大小,同时采集位移传感器的数据,通过自带算法自动计算出待测金属丝的金属杨氏模量.立柱衡量中间以及立柱底部平台中间,均有夹头用于固定待测金属丝.位于底部的滑动夹头的下方连接电机和传感器,用来施加压力以及读取相应的力学和位移变化数据.下部分主要由位移传感器、力传感器、电机组成.位移传感器用于测量待测金属丝力产生形变的程度大小并将所得数据传输给数据采集系统.力传感器主要用于衡量电机施加给金属丝的拉力是否准确.电机用于给金属丝施加拉力.

图1 自制智能杨氏模量实验仪实物图
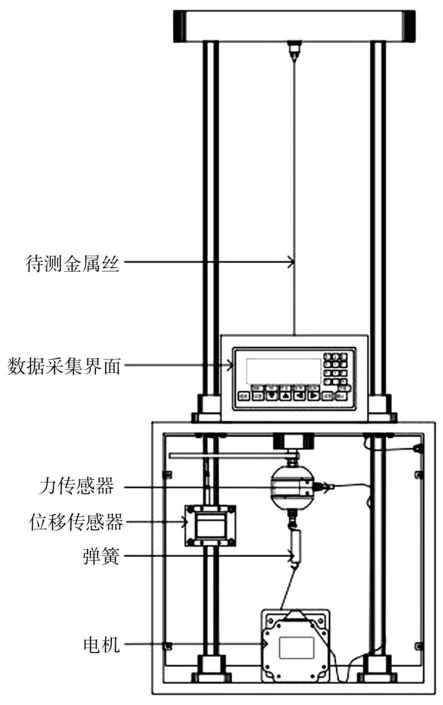
图2 自制智能杨氏模量实验仪结构图
3 测量与数据处理
3.1传统的光杠杆法测量金属丝杨氏模量
(1)调节望远镜与光杠杆装置.将望远镜放置在与光杠杆同一高度的1.5~2m处,调节光杠杆镜面与水平台垂直,望远镜成水平,对准平面镜中部.
(2)调整望远镜.调整望远镜改变望远镜倾角观察到标尺的像,调节目镜至观察到叉丝的像,再调节焦距得到清晰的像.
(3)逐个加砝码.每加一个砝码记录一次数据;加完砝码再依次减少砝码,记录数据.
(4)测量金属丝原长、直径、光杠杆常数b.
(5)逐差法处理数据再依据胡克定律得到金属丝的杨氏模量.
(6)数据记录如表1,数据处理如下.
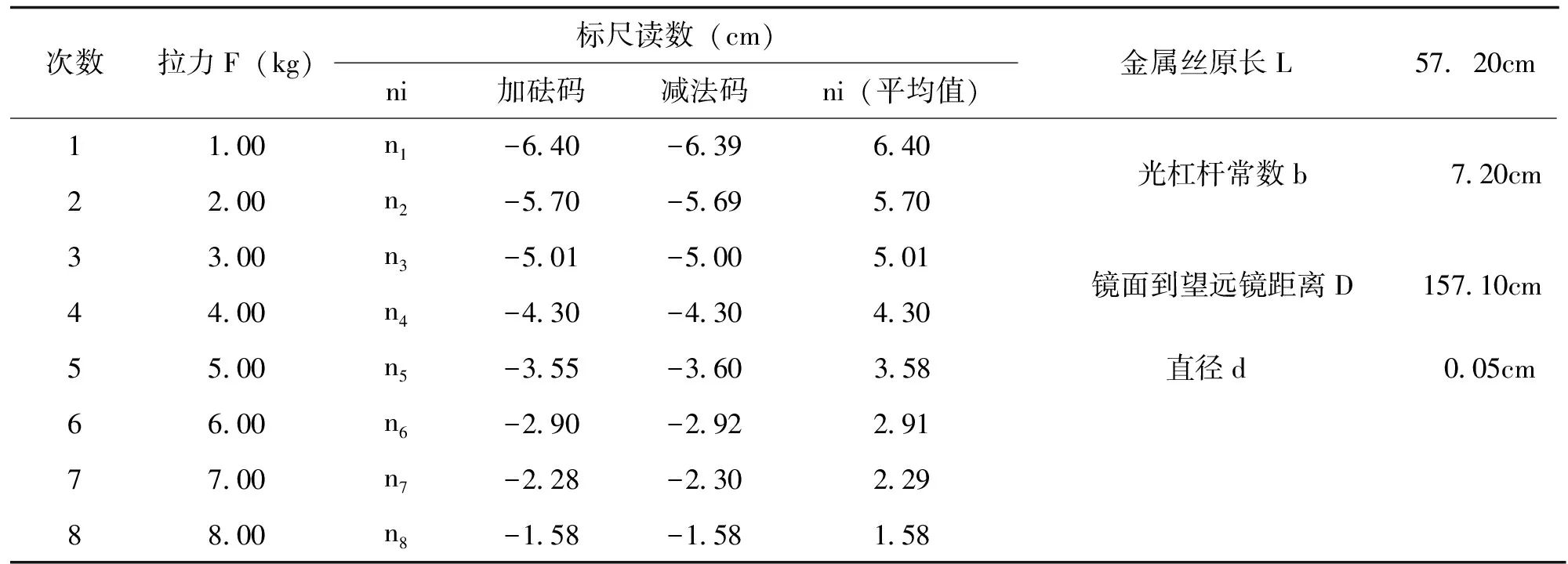
表1 光杠杆法测量金属丝杨氏模量数据记录

=0.69
3.2用自制智能杨氏模量测量仪测量金属丝的杨氏模量
(1)将杨氏模量测定仪水平放置,调节仪器使立柱和金属丝处于铅直状态,手按浮台看是否有弹性.
(2)测量金属丝原长、直径.
(3)将样品金属丝固定于仪器中.
(4)打开实验仪器电源,按数据采集面板的“SET”键进入设置界面,将所测得的样品钢丝的原长数据输入实验仪器再次按下“SET”键输入直径数据,再按下“SET”键设置拉伸步进.最后按下“SET”键或“ENT”完成数据输入.
(5)开始实验,按拉伸键逐步拉伸钢丝并记录相应的数据与表格中然后按返回键逐步减小拉力至开始记录时的初始值.记录数据.
(6)按返回键将拉力减小至零,防止钢丝疲劳.
(7)数据记录及数据处理均为仪器自动进行,见表2.
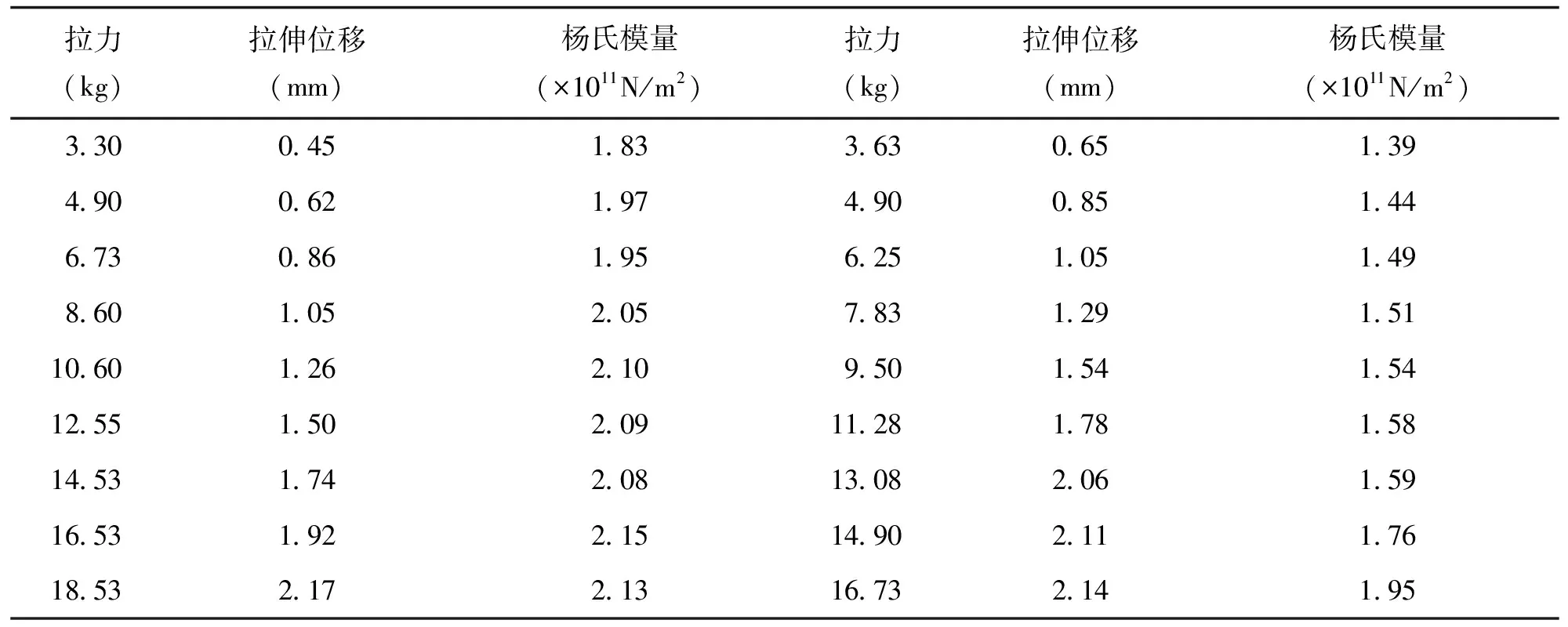
表2 用自制智能杨氏模量测量仪测量金属丝的杨氏模量数据记录
4 实验结论
通过对光杠杆法和杨氏模量测量仪法的过程以及结果进行对比分析,可以得出以下结论:
(1)杠杆法和杨氏模量测量仪测得的金属丝的杨氏模量相差较小.说明杨氏模量测量仪测量金属丝的杨氏模量是可行的.
(2)用杨氏模量测量仪减少了许多测量仪器的调节步骤,不仅可以方便快捷的测量金属丝的杨氏模量也可以减少人为操作失误.
(3)自制智能杨氏模量测量仪操作简单、测量时间短,为快速测量金属丝杨氏模量提供了一个可行的方法.该方法还能更好的适应环境,具有良好的应用前景.