基于三维激光扫描技术的边坡变形趋势多维度分析
2021-09-04郑远杨刘春阳
郑远杨 刘 超 刘春阳 丁 涛
(安徽理工大学空间信息与测绘工程学院;矿山采动灾害空天地协同监测与预警安徽省教育厅重点实验室 安徽淮南 232001)
人工开采、地质活动对当前边坡稳定性有重要影响,边坡活动会导致人员财产受到侵害,环境得到破坏。边坡监测的有效实施,能获取其是否处于稳定阶段,防止在某个时间发生滑动,因此对边坡进行观测具有重要意义[1]。
当前边坡监测技术常用的有GPS测量[2]、测量机器人[3]、数字近景摄影测量[4]、合成孔径雷达干涉测量[5]等技术。三维激光扫描技术具有极高的场景复制能力,通过扫描仪可获取实验对象的立体三维信息,经过点云数据处理,获取测区的变形信息,近年来在变形监测中被广泛应用[6]。文献[7]给出一种利用多时相边坡整体DEM叠加分析方法获取边坡变形信息,但若采集区环境特殊,采用DEM叠加分析,则会直接降低采集区分析效果;文献[8]给出一种利用扫描仪获取隧道数据,并处理获得隧道三维、地形图、横断面图以及DEM模型的方法来进行高危边坡的监测,但无法预测边坡滑动的方向,以及处理高边坡滑动量的影响。根据以上问题,文章对边坡进行坡度、坡向分析,以及整体3D偏差和剖面线提取进行综合分析。
1三维激光扫描技术应用
1.1三维激光扫描仪工作原理
三维激光扫描仪是一种主动非接触式测量系统,由高速精确的激光测速仪和一组反射棱镜组成,这些反射棱镜可以引导激光以均匀的角速度进行扫描。激光测速仪主动向被测物体发射激光,同时被测物体将激光通过漫反射的方式传回到接收器,从而达到测距的目的。扫描仪与获取的每一个物体扫描点都有一个斜距S,再根据扫描仪与观测物体的横向扫描角度值α和纵向扫描角度值θ,就可以解算出测站与所测物体每一个扫描点的三维坐标[9]。计算公式为:
(1)
1.2边坡监测作业流程
三维激光扫描技术在边坡检测中一般分为点云数据采集、点云数据预处理、点云数据分析、成果输出4个阶段。
1.2.1点云数据采集 边坡数据采集应根据实验环境合理布站,方案的优化设计,可以节省观测时间,提高数据的质量,同时也方便内业数据处理。
1.2.2点云数据预处理 点云数据预处理包含点云数据的拼接、去噪、配准以及DEM模型的建立。该实验进行二个测站观测,观测数据包含所需数据外,还含有行人、树木等与本次实验无关的数据,因此需要进行剔除。设置二个观测站,且二次数据在其本身为原点的情况下获取的,因此要进行点云数据的配准,将其统一到一个坐标系下;配准结束后,利用扫描仪自带的HD-3LS-SCENE软件构建DEM模型。
1.2.3点云数据分析 利用处理好的边坡点云数据和构建好的DEM模型进行数据分析,获取边坡的坡度、坡向以及整体和剖面线变化信息。
1.2.4成果输出 根据处理过后的边坡点云,输出变形信息。
1.3边坡监测方法
1.3.1坡度、坡向计算原理 坡度与坡向是研究地形表面起伏的关键要素。坡度指地表一点的切平面与水平面的夹角,即研究倾斜程度,是地表曲面函数z=f(x,y)在东、南、西、北方向上高程变化率的函数。
利用三维激光扫描仪测量出边坡参数,进而计算坡度、坡向。基于坡度计算公式,利用拟合曲面法提取地面坡度,生成栅格数据模型。拟合曲面法即二次曲面,通过3×3的DEM栅格分析窗口中进行,每个栅格中心都有一个高程值,在分析窗口的DEM数据矩阵中连续移动完成整个区域的计算工作[10]。
坡度的计算公式为:
(2)
式(2)中,g为格网间距。
坡向指坡面一点切平面的法线在水平面的投影与该点正北方向的夹角,即研究一点的高程最大改变量方向。其数学表达式为:
(3)
1.3.2边坡3D和2D比较原理 通常获取的点云边坡数据量大,且点云之间具有一定的空间距离,可利用点云的这些特征获取整体或者区域的变形信息。剖面线一般指地形的高程最高点到最低点的高程变化,根据这一特点,可以很好地解算出此次边坡的滑动变化量。
(1)3D比较。利用3D比较分析,会在测试对象和参考对象之间生成色谱图,可以比较直观的看出两期边坡点云数据在X、Y、Z方向上的偏差值。该实验以第一期边坡点云为参考对象,第二期点云为测试对象。
(2)2D比较。通过对被测对象某些重要截面进行2D偏差分析。重要截面的选取,一般选择XY、XZ、YZ方向上的截面,通过2D分析,可以得出重要截面的色谱偏差图,从而获取截面的偏差值[11]。该实验忽略XZ方向剖面线2D比较。
2工程实例
该实验区域位于校园施工地附近,长期施工导致边坡部分脱落,因此通过此实验来验证边坡的变形情况。因其周围含有之前布设的控制点,利用全站仪引点到边坡附近;扫描仪进行二次实验区域扫描,并利用标靶进行拼接,得到边坡整体的点云数据;全站仪进行标靶的观测,获取标靶的三维点位信息,进行后期的精度评定。根据观测得到的点云数据进行预处理,得到边坡的DEM模型,如图1所示[12]。
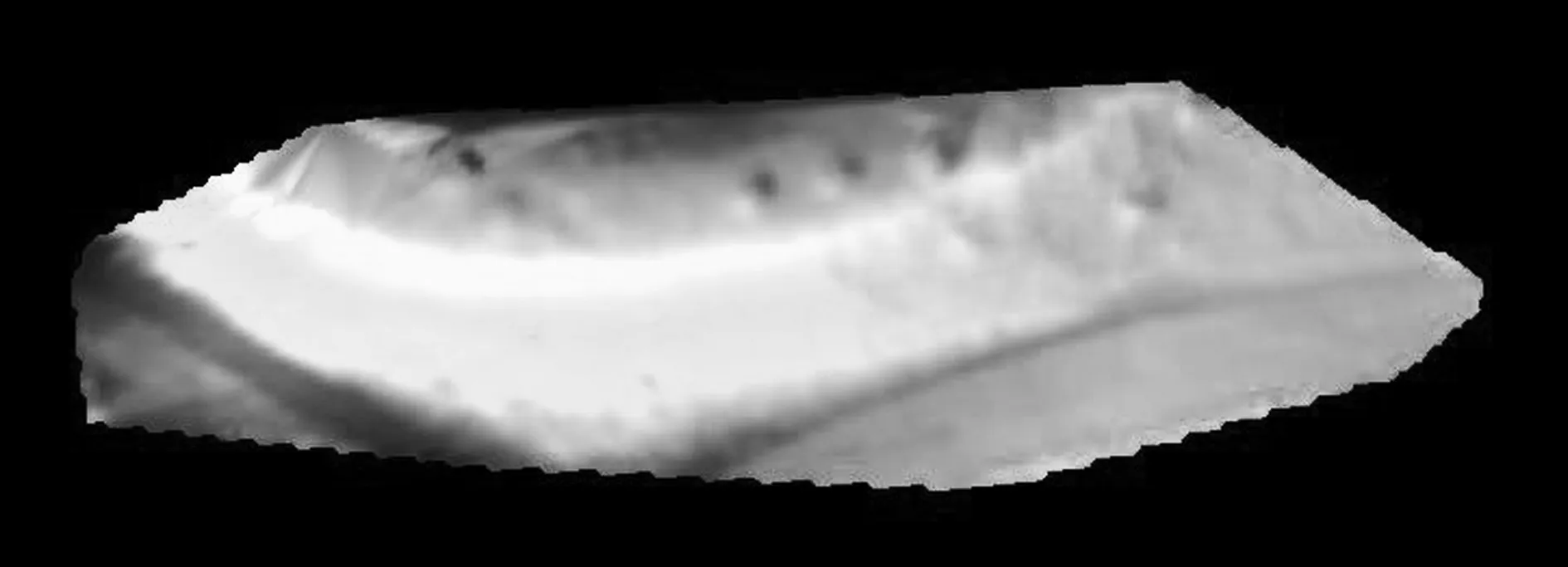
图1 边坡DEM模型
2.1基于边坡坡度坡向分析
坡度、坡向的变化,决定边坡的位移情况,经过计算得出边坡整体坡度在10~21°之间;从第一期数据可知,边坡最高坡度为50.26°,而第二期最高坡度为49.61°,发生了微小变化,且两期坡度差值整体在±2°之间,因此观测期间边坡坡度发生微小变化。
根据两期边坡点云数据,将TIN模型数据生成栅格数据,利用栅格数据进行边坡坡向分析。经过计算得出边坡右侧整体往北滑动,部分往西、西南方向滑动;边坡左侧主要往北、东北方向滑动;结合两期坡度变化图,整体边坡各往两侧发生微小滑动,如图2所示。

(a)一期坡度变化图

(b)二期坡度变化图

(c)两期坡度差值图
(d)边坡坡向变化图
2.2边坡点云3D比较分析
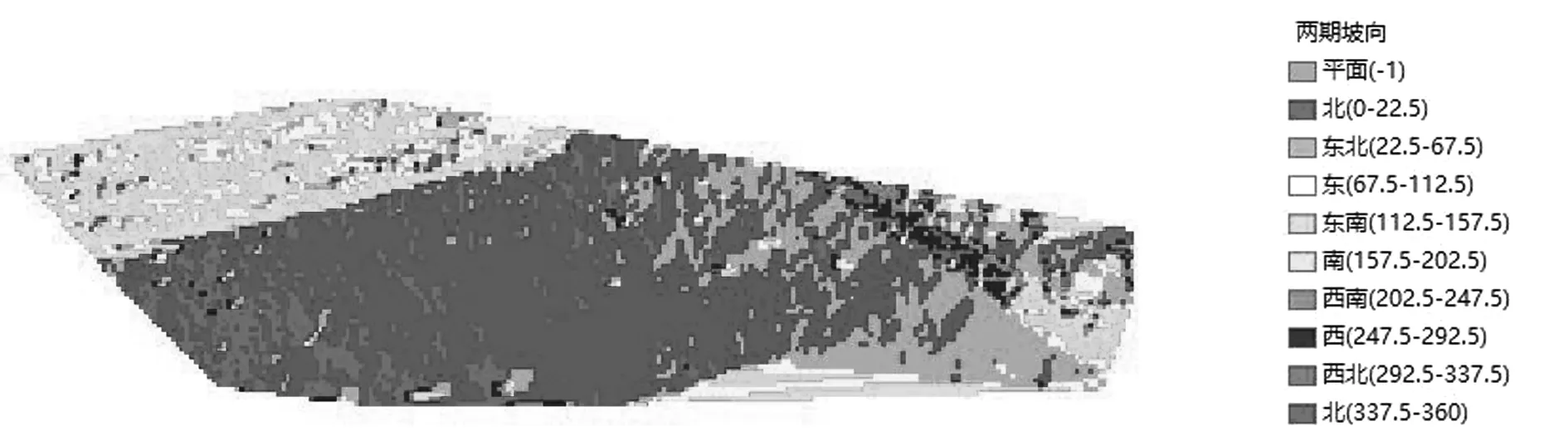
基于对边坡点云做整体的3D比较,获取边坡滑动数据。两期边坡数据进行3D比较前,首先对两期点云对齐,由于观测对象是边坡,无明显特征点,采用“N点对齐”方式后,再进行“最佳拟合对齐”,两期数据导入之前已经进行过配准,因此产生的对齐误差忽略不计;以一期为参考对象,二期为测试对象,比较结果如图3所示。
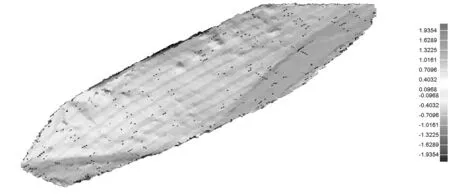
图3 边坡3D比较色谱图
由图3可知,边坡整体位移量在±1.9354mm之间,其中边坡的右侧滑动量比较明显,顶部有少量下滑至边坡右侧居多,基本上处于稳定状态;经计算得到两期边坡的最大滑动上偏差为0.3312mm,最大滑动下偏差为-1.9354mm,均方根误差为0.0316mm;两期点云的偏差均没有超过最大和最小临界值,经计算得出偏差分布在-0.0968~0.0968mm之间,约占整体点云的99.06%。根据边坡点云的3D比较,整体偏移量不超过1cm,边坡发生了微小滑动。
2.3边坡点云的地形剖面线提取分析
基于3D比较的基础上,再进行边坡的剖面线提取比较。该实验提取两期边坡的XY、YZ坐标方向上的剖面线,进行2D比较时,将平面最大偏差设置为10mm。根据计算得到XY方向的剖面线最大2D偏差为±0.2517mm,均方根误差为0.0830mm,边坡在剖面XY方向上发生微小滑动;在YZ方向上,剖面线最大2D偏差为0.0474~-0.2610mm,均方根误差为0.0394mm,边坡在剖面YZ方向上发生了微小滑动,如图4所示。
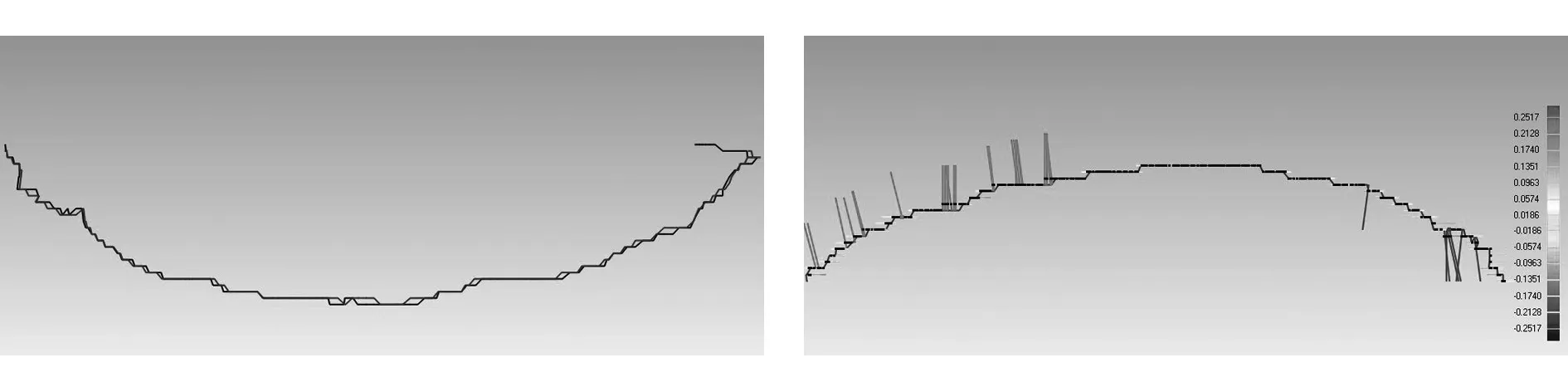
(a)XY剖面线提取及2D比较
(b)YZ剖面线提取及2D比较
2.4边坡精度分析
该研究测量采用全站仪进行标靶测定来检核扫描仪测量精度,根据实验场地环境,此次试验区含有树木等干扰,因此全站仪测量5个地面标靶来检核,如表1和表2所示。
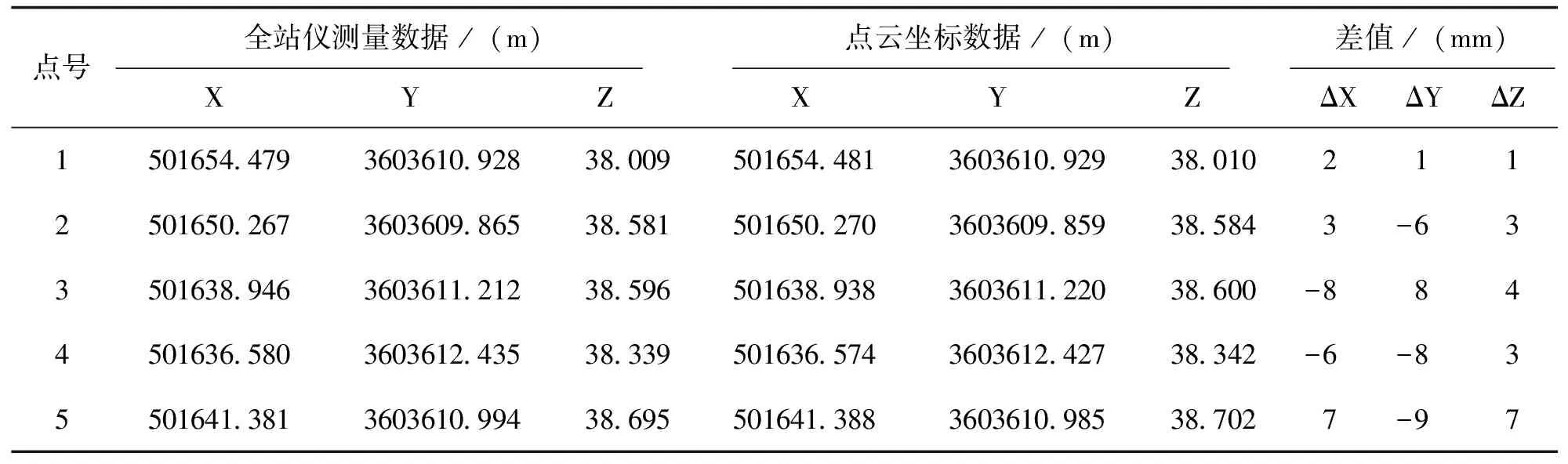
表1 第一期全站仪和三维激光扫描仪数据及二者差值

表2 第二期全站仪和三维激光扫描仪数据及二者差值
分析表1和表2可知,两期点云数据和全站仪进行对比,X方向最大误差值为8mm,Y方向最大误差值为9mm,Z方向最大误差为9mm;其中Y方向和Z方向最小误差均为1mm,X方向最小误差为2mm。根据精度要求,均在该实验的误差范围内。
3结语
(1)实验结果表明,此次边坡发生微小滑动。较于传统测量来说,通过面与面、模型与模型之间整体的比较,更能突出边坡的变形信息。在坡度、坡向检测结束后,运用3D比较方法,从两期边坡X、Y、Z方向上进行偏差计算,更能突出该实验的整体监测性。
(2)在进行精度评定方面,合理运用全站仪可检测该实验的精度。由于通过全站仪进行引点,将已知控制点引进测区附近,会产生引点误差,因此在进行观测时注意控制误差范围。
(3)扫描仪与全站仪的结合使用,可以保证边坡长期稳定性的观测,做到数字化高效监控。
