木薯仿生挖掘铲的设计及有限元静力学分析
2021-09-03李生红易子钧卢建新张天全黄植功
李生红 易子钧 卢建新 张天全 黄植功
[摘 要 ]针对木薯植株在被收获过程当中,挖掘铲容易出现自身质量过大、碎土性能不佳、减轻土壤黏性差等问题,基于仿生学理论,设计了一种土拨鼠仿生挖掘铲。首先用MATLAB对土拨鼠爪趾进行曲线拟合得到其多项式函数,再在SolidWorks里面设计出土拨鼠仿生挖掘铲的三维模型。最后导入到 ANSYS Workbench中进行有限元静力学仿真分析。通过对比普通挖掘铲、实心仿生挖掘铲、空心仿生挖掘铲的应力应变情况,选择出一种满足设计要求的实心挖掘铲。对比分析结果得到:实心仿生挖掘铲拥有良好的力学性能、使用寿命及较好的质量。
[关键词]木薯植株;挖掘铲;仿生;有限元静力学分析
[中图分类号]S225.71 [文献标志码]A [文章编号]2095–6487(2021)06–00–02
[Abstract]In the process of cassava plant harvesting, the digging shovel is prone to the problems of excessive weight, poor soil crushing performance and poor soil viscosity. Based on the bionics theory, a bionic digging shovel of woodchuck is designed. Firstly, the polynomial function of the claw toe of the groundhog is obtained by curve fitting with MATLAB, and then the three-dimensional model of the bionic digging shovel of the groundhog is designed in SolidWorks. Finally, it is imported into ANSYS Workbench for finite element static simulation analysis. By comparing the stress and strain of ordinary digging shovel, solid bionic digging shovel and hollow bionic digging shovel, a solid digging shovel meeting the design requirements is selected. The results show that the solid bionic excavator has good mechanical properties, service life and good quality.
[Keywords]cassava plant; Digging shovel; bionics; Finite element static analysis
在木薯产业中,收获木薯的方式会对其产生重要的影响,随着木薯种植面积的不断扩大,仅仅只依靠手工收割方式已经无法满足收获大量木薯的需求。现如今我国木薯农业发展潮流的主要趋势是木薯收获的机械化,挖掘铲作为木薯收获机整机结构中的核心部分之一,其性能好坏将直接影响到木薯收获机的收获效率以及机械性能。目前市面上常见的挖掘铲存在阻力过大、土壤残留过多等问题,因此设计可靠实用的挖掘铲对实现木薯收割机械化具有极其重要的意义。
2013年12月,邹翔翔等人发现当前木薯收获机的挖掘铲存在质量过重以及入土、碎土困难的问题,以东方蝼蛄前足趾爪作为原型,设计了一种仿生挖掘铲,该铲具有较好的抗疲劳强度和良好的入土性能,同时降低了作业中所受牵引阻力。2015年10月,王涛等人基于土壤的碎裂理论,参考薯类等块根类收获挖掘铲设计出了多阶挖掘铲,该多阶挖掘铲与普通挖掘铲相比,其碎土性能有所提高,并且減少了应力的集中,从而减少了变形量,但其排土性能较差。2018年10月,益爱丽等人以中华田园犬的前爪为参考,设计出一种入土阻力小且碎土能力强的仿生挖掘铲,但因其模仿狗爪这一结构特点,伤薯率较高。2020年6月,端木令坚以黄毛鼠前足爪趾为仿生原型,利用仿生减阻理论、仿生设计技术方法、离散元仿真及土壤破碎理论,设计出了一种铲齿型木薯仿生挖掘铲,该铲具有较好减阻效果,但结构较复杂,排土性不高。
根据仿生工程理论,从擅长挖掘土壤的动物中获得木薯挖掘铲的仿生改造设计,从而提高其降低阻力的性能,是一种新型研究方法。土拨鼠是啮齿类动物中的一种,在外形和生活方式上与老鼠相似,身体肥厚、脖子粗、吻宽、耳朵小眼睛细、四肢短而粗、尾巴短而松、爪子十分坚硬锋利,具有高超的挖掘能力。因此,通过用Corel DRAW2019图形设计软件来提取土拨鼠前爪的外部轮廓曲线,在此基础上设计一款新型木薯仿生挖掘铲,运用Solidworks软件进行仿生铲的三维建模,最后在Ansys软件中对其进行有限元静力分析,分析其应力与应变,并与市面常见普通挖掘铲进行对比,选择性能更加优良的挖掘铲。
1 整机结构与工作原理
1.1 整机结构
挖拔式木薯联合收获机的主要组成部分包括牵引装置、挖掘装置、夹持拔起装置、机架。
1.2 工作原理
木薯收获机作业时,农用拖拉机在木薯收获机的前方牵引,木薯种植方向与收获机的挖掘装置方向正对,拔起装置在挖掘装置的后方,随着拖拉机向前行进,挖掘装置在拔起装置的前方对木薯块根周围的土壤进行松土,拔起装置在后方进行拔起,木薯块根向上离开土地,挖拔工作完成。
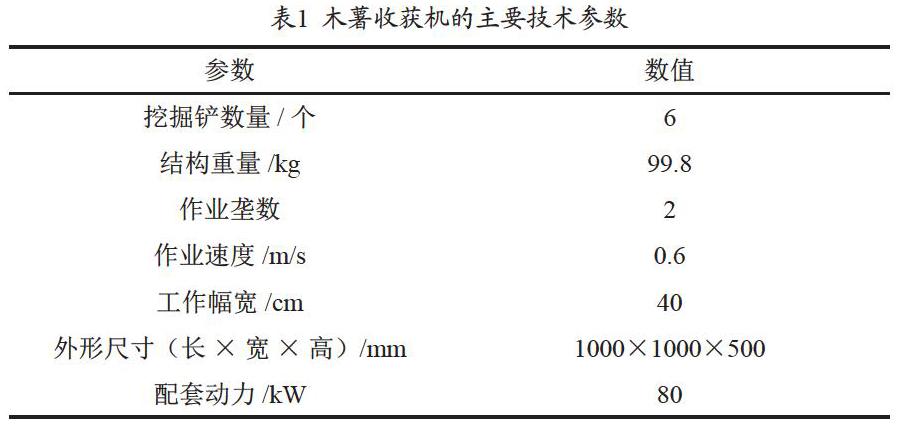
1.3 主要技术参数
挖拔式木薯联合收获机主要技术参数详见表1。
2 关键部件的设计
2.1 设计依据
描述木薯植株主要由叶片、茎干、块根3部分组成。木薯的块根比较脆,因此在设计挖掘铲时就需要考虑到对块根完整性的保护。基于众多有关工程仿生学的理论,发现土拨鼠作为一种长期栖息在草原和高山草甸中的动物,其弯曲而锋利的前爪使其在挖掘深的岩石洞道时,表现出极强的挖掘能力。由于我国的土壤黏性较大,因此本文以土拨鼠的爪子作为研究对象,研究仿生挖掘铲。
2.2 外轮廓的提取
土拨鼠爪子的后四根趾较为发达。以土拨鼠爪的第二趾为例,对其纵向截面的最大轮廓曲线作为仿生原型进行设计。
将Auto CAD软件的的点集的批量导入Matlab中对点集进行多项式拟合,通过调整拟合系数,选取最合适的多项式拟合函数如下:内轮廓曲线函数表达式为f(x)=559.3×x2-1781×x+1407,和方差SSE=0.0001762,确定系数R-square=0.9576;外轮廓曲线函数函数表达式为:f(x)=20.28×x2-65×x+41.33,和方差SSE=4.705e-06,确定系数R-square=0.9986;趾尖轮廓曲线函数表达式为:f(x)=164.5×x2-742.7×x+827.6,和方差SSE=3.026e-06,确定系数R-square=0.9746。
上诉多项式拟合函数的和方差均接近于0,确定系数均接近1,则说明模型选择和拟合效果好。
2.3 挖掘铲的仿生设计
由于木薯植株的偏离程度和驾驶人员对机器的操作程度的熟悉难以得到一个确定的范围,因此设计了一种挖掘宽度为1000 mm的挖掘铲。土拨鼠爪趾轮廓曲线函数表达式为:f(x)=164.5×x2-742.7×x+827.6。因为从华南8号木薯测量得到的木薯直径在40~60 mm之间,在设计挖掘铲的相邻铲齿的最小间距不能大于30 mm,以此保证木薯不从铲齿之间的缝隙掉落。同时设计了一种空心铲,包括铲齿和连杆均为空心,为了验证根据土拨鼠前爪设计出的仿生挖掘铲相较于贾晶霞等人设计的普通马铃薯挖掘铲,更具有良好的性能,进而对比选择出最佳的挖掘铲类型。
2.4 挖掘铲结构设计参数
挖掘铲的结构设计参数主要取决于铲子的入土角度、挖掘深度、挖掘面宽度等3个参数,挖掘铲的入土角度a是挖掘铲在工作时刀刃面和水平地面所形成的夹角;挖掘深度h是挖掘铲深入到土壤中与土壤接触的垂直高度;挖掘面宽度w是随着挖掘铲深入土壤的不同深度而发生不断变化的。
3 挖掘铲有限元静力学分析
考虑到外界地理环境的限制,本文所设计的土拨鼠仿生挖掘铲采用对其进行有限元静力学分析的形式,分析其工作时的最大形變量及应力分布情况,以此作为更好对三种不同类型的挖掘铲进行选择的理论依据。
ANSYS Workbench作为一款有限元分析软件,在其中建立相对复杂的三维模型时,操作较为烦琐。在SolidWorks中建立三种不同类型挖掘铲的三维模型,并导入ANSYS。为选择出一种性能更加优良的基础,本文将普通的挖掘铲和所设计的实心和空心的土拨鼠仿生挖掘铲进行仿真,比对仿真结果,进而选择性能最佳的一种挖掘铲。首先,对建立好的挖掘铲的进行材料属性的定义,设计相应的参数如下:材料类型定义为结构钢,密度ρ=7.85×10-6 kg/mm3,泊松比μ=0.3,弹性模量E=2×105 MPa;然后,选用分析精度为10mm的网格对模型进行网格划分。在实际使用的过程当中,设计挖掘铲所选用的材料是优质碳素结构钢中的65 Mn,其屈服强度σs≥430 MPa,伸长率δ≥9%,这两个值可以作为设计校核值。
本文设计的实心和空心两种土拨鼠仿生挖掘铲中,可以看出:实心和空心的挖掘铲的最大应力分别为160.81 MPa、192.14 MPa,小于材料的屈服强度,可以满足强度设计的条件;最大变形量分别为1.1529 mm、1.2517 mm,和仿生挖掘铲的整体长度相比,可以忽略,远小于9%。贾晶霞等人设计的普通挖掘铲的最大应力为828.61 MPa,比材料的屈服强度大,不满足强度设计要求;最大变形量为12.754 mm,大于了挖掘铲整体长度的9%,在刚度方面不满足设计要求。因此普通挖掘铲相较于土拨鼠挖掘铲而言,不能够满足设计要求。
4 结论
(1)利用土拨鼠第二趾的外轮廓进行曲线拟合,拟合后的方差接近0,确定系数接近1,说明了该函数能够准确模拟土拨鼠爪趾结构,证明了模型以土拨鼠爪趾为原型能够与拟合效果很好的吻合。
(2)无论是实心挖掘铲还是空心挖掘、普通挖掘铲,其应力最大处在云图中挖掘铲的后半段显示,为解决后半段应力集中这一现象,应当在设计时,加强对后半段挖掘铲的设计;最大形变量在云图中会分布在铲子的前端部分,因此,在设计挖掘铲时,应当考虑铲前端的刚度,加强其刚度。
参考文献
[1] 向红兴.木薯高产栽培技术及其示范成效[J].现代农业科技,2017(12):26,34.
[2] 蔡东宏,杨莲珍,黄海.世界木薯生产概况及应用趋向[J].世界热带农业信息,1999(1):1-7.
