一种能见度融合方法在黄渤海区域雾数值预报中的应用
2021-09-03刘志杰王炜赵玥史得道
刘志杰,王炜,赵玥,史得道
(1.天津市西青区气象局,天津 300380;2.天津市海洋气象重点实验室,天津 300074;3.天津市气象科学研究所,天津 300074;4.天津市津南区气象局,天津 300350;5.天津海洋中心气象台,天津 300074)
1 引言
雾是一种常见的灾害性天气现象,它是空气中悬浮的大量水滴散射和吸收光线后产生的能见度降低的自然现象。在气象观测中,规定大雾为近地面大气中水汽凝结成水滴或冰晶使水平能见度小于1 km的灾害性天气现象[1],能见度的大小用来表征雾的等级。根据雾等级预报的国家标准,按照能见度的大小将雾分为5个等级,即轻雾(1.0~10.0 km)、大雾(500~1 000 m)、浓雾(200~500 m)、强浓雾(50~200 m)和特强浓雾(<50 m)。不同等级的雾对生产生活特别是交通出行造成的影响不同,对应采取的措施也有显著差别[2],因此在生产和生活中公众迫切需要雾的等级和能见度的精细化预报产品。
以往研究主要从雾的特征分析[3-4]、统计[5-6]和数值模拟3个方面进行诊断预报,其中数值模拟具有更广泛的应用前景[7]。起初,部分学者开展了一维雾模式的预报研究[8-9],之后逐渐转变为以三维雾模式或中尺度模式预报为主[10-11],其中中尺度模式多采用逆温层结、风速和液态水含量等要素作为判别雾发生的预报指标,取得了较好的模拟预报效果。鉴于雾的预报分级以能见度为标准,采用其他变量难以对雾的等级进行精确定量预报,因此使用模式后处理得到的能见度来分析和预报雾逐步成为研究和业务工作的重点。
在大雾天气能见度的预报工作中,主要运用相对湿度[12]和液态水含量[13-14]两类方法,也有部分研究和业务模式[11]将气溶胶粒子效应单独计算,以更精细地描述大气变化。以往研究表明仅用液态水含量或者相对湿度估算能见度均存在一定的缺陷[15],相对湿度和液态水含量两项指标结合才能更好地提升大雾天气的预报准确率[16-18]。因此大雾预报急需建立一种新的能见度算法,以提升雾的预报精度,满足大雾天气分等级预报需求。
本文尝试提出一种新的融合相对湿度和液态水含量的能见度计算方法,解决数值模式中能够同时准确衡量浓雾和轻雾能见度预报问题,满足黄渤海及沿岸地区高速公路、机场和港口航道雾的精确预报需求[19]。根据研究区域、出现季节、模式模拟效果和资料完整性综合分析,选取了天气预报模式(The Weather Research and Forecasting model,WRF)。该模式较好地模拟出黄渤海春季和冬季两次大雾天气过程,其中2016年3月大雾个例发生于初春黄渤海洋面,12月大雾个例发生于冬季黄渤海沿岸地区,两者具有一定的代表性和比较性。对上述两个个例模拟结果,分别采用液态水含量算法、相对湿度算法和新融合方法计算其能见度值,并分析和讨论了3类方法的预报性能差异及其影响因素。
2 一种量化雾的能见度新融合方法
本文将利用计算能见度常用的Koschmieder定律[20]建立一种融合相对湿度和液态水含量的能见度计算公式。根据Koschmieder公式,气象能见度Rm和大气消光系数Kex之间存在如下关系:

式中:ε一般取值0.02;大气消光系数Kex是大气分子和粒子散射和吸收的共同作用的结果。在干洁大气中,如果忽略分子的吸收作用,此时气溶胶粒子的散射成为大气消光的主要因素[21]。由于气溶胶粒子的吸湿增长作用,当相对湿度变化时,气溶胶粒子的消光系数也相应发生变化,从而引起能见度变化[22-23],此时能见度和相对湿度具有较好的对应关系。当大气中湿度较大并存在明显液态水滴时,液态水的吸收和散射成为大气消光的重要因素。
在业务应用中,为避免大气消光系数Kex计算太复杂,可将Koschmieder公式简化处理,建立相对湿度或液态水含量同大气消光系数之间的统计方程。例如,夏凡等[12]提出的相对湿度和能见度的关系式:

式中:VR为单独用相对湿度计算的能见度值,单位:km;RH(Relative Humidity)为2 m相对湿度,单位:%;KR为粒子吸湿增长时相对湿度作用的消光系数。该式的相关系数是基于山东地区历史资料统计得出,其参数在一定程度上包含了气溶胶粒子作用。
此外,Kunkel[24]给出了经典的液态水含量和能见度计算公式:

式中:VL是单独使用液态水含量计算得到的能见度值,单位:km;LWC(Liquid Water Content)为单位体积空气所含液态水含量,单位:g/m3;KL为液态水粒子作用的消光系数。该式适用于计算包含液态水的大雾天气能见度。在本文中,液态水含量取近地层云水和云冰两项之和。考虑到雨水含量同能见度拟合效果差,本文未予以考虑。
为更好地描述大雾等级分布和能见度变化,本文提出了包含相对湿度和液态水含量的能见度新融合算法。令新融合算法中消光系数等于前述两个因子消光系数之和,即:

式中:KN为新融合算法消光系数。参考式(1)有:

式中:VN为融合算法能见度值。下文将用式(2)、(3)和(5)分别计算WRF模拟的两个大雾天气过程的能见度。此外,在缺乏液态水含量业务观测数据的情况下,为了检验模式输出的液态水混合比数据的合理性,利用式(3)反算式(6)并进行单位换算后估算真实低层大气中的液态水混合比。
式(6)估算的液态水混合比是在观测能见度约束下的液态水混合比的最佳估算值,可以作为检验模式预测液态水混合比的合理值的参考值。
3 数值模拟方案设计
本文需要开展新建立的能见度融合算法在WRF模式中的可应用性研究。为了检验这种新算法在实际应用中的可行性,本节设计了WRF模式模拟试验方案,对两个黄渤海区域代表性大雾天气个例进行了模拟。
3.1 数据资料和检验方法
本文使用了FNL(Final Operational Global Analysis)资料、国家地面站逐时观测资料和卫星资料3种数据。美国国家环境预报中心(National Centers for Environmental Prediction,NCEP)和美国国家大气研究中心(National Center for Atmospheric Research,NCAR)每日4次的FNL资料用于WRF模式模拟、分析和对比检验。地面站逐时相对湿度和能见度资料用于对比检验。卫星资料来自国家卫星气象中心发布的《气象卫星雾监测报告》,用于提取雾区分布信息。
能见度预报效果的检验采用了平均偏差E及均方根误差(Root Mean Square Error,RMSE)两种方法,主要计算研究区域内国家站能见度实况值和预报值之间的差值。

式中:V m为能见度模拟值,V o为能见度实况值,单位:km;N为站点数。
3.2 数值模拟方案
WRF模式是气象上常用的完全可压缩以及非静力中尺度天气预报模式,由NCEP等科研机构采用F90语言编写开发。文中两次大雾天气个例选取了天津市气象局业务模式区域(114°~126°E,31°~44°N),模式中心设在115°E,40°N,采用水平网格分辨率为5 km的单层方案,格点数为441×369,垂直方向分为51层。初始场和边界场条件利用每日4次的FNL再分析资料,输出结果为每小时一次。表1列举了模式采用的主要物理参数化方案[13]。

表1 物理过程参数化方案
4 结果分析与讨论
4.1 大雾天气能见度空间分布特征模拟能力分析
4.1.1 2016年3月大雾天气过程空间特征分析
在检验新融合算法的雾空间特征模拟能力前,需要先检验WRF模式模拟雾区的能力。2016年3月3日清晨至3月5日上午,渤海和黄海北部持续出现大雾天气(见图1a)。为了检验此次大雾过程的数值模拟效果,本文采用数值模式中最底层云水混合比和冰混合比之和作为液态水混合比值,并取阈值0.05 g/kg作为雾区判别的标准[13],同时根据式(6)将地面观测站能见度值反演为液态水混合比估值,以此比较模式雾区分布与卫星监测雾区和反演估值的对应关系(见图1)。结果显示:数值模式在4日00时(世界时,下同)模拟的渤海、北黄海以及陆上两个半岛地区的雾区与监测和反演雾区基本一致,仅在黄海西部沿岸地区出现虚假雾区。
新能见度融合算法的雾模拟能力检验,选用了4日00时卫星监测雾区(见图1a)和陆上观测能见度作为实况数据。通过液态水含量算法、相对湿度算法和新融合方法3种不同算法的能见度值(见图2)对比可知:仅考虑相对湿度的算法仅能模拟出1 km以上的能见度分布,整体上有显著偏差。仅考虑液态水含量的算法较好地模拟出了大雾天气,但受限于偏高的液态水混合比模拟值,能见度计算偏低。考虑了两者的融合算法较好地模拟了0~10 km雾的等级分布,既能在一定程度上模拟出两个半岛雾区,又使得从轻雾到特强浓雾的分级更加细致,相对于传统算法改进效果明显。在模拟效果较差的黄海沿岸地区,3类算法计算结果均不理想。

图1 2016年3月4日00时卫星监测、模拟和反演雾区分布

图2 2016年3月4日00时能见度实况值和不同算法计算值(单位:km)
4.1.2 2016年12月大雾天气过程空间特征分析
与上一节类似,本节首先检验个例中WRF模式的雾模拟能力。2016年12月18日和19日上午,黄渤海沿岸部分地区出现大雾天气(见图3a)。模式液态水混合比分布和卫星监测雾区以及反演雾区的比较结果(见图3)显示,19日01时在渤海湾及其沿岸、两个半岛和江苏沿岸地区均较好地模拟出了雾区,但范围相对偏小。
此次过程中19日01时3种不同算法能见度值同站点观测值(见图4)以及卫星监测雾区(见图3a)对比可知,在模拟效果较好的渤海湾及沿岸、两个半岛和江苏沿岸地区,相对湿度算法仅能模拟出轻雾天气,无法模拟出大雾雾区;液态水含量算法则仅能模拟500 m以下浓雾等级的能见度分布,对大雾及轻雾级别能见度模拟效果较差,无法准确区分等级;融合算法吸取了两者的长处,较好地模拟出雾区分布,同时对雾的模拟分级更加细化,改进效果明显。

图3 12月19日01时卫星监测、模拟和反演雾区分布

图4 2016年12月19日01时能见度实况值和不同算法计算值(单位:km)
4.2 大雾过程能见度时间变化特征模拟能力分析
4.2.1 2016年3月大雾天气过程能见度时间序列特征为了检验新融合算法在整个雾过程中的能见度计算效果,本文选取了该过程中模拟效果较好的大连皮口站和威海成山头站作为代表性站点,对比了3种能见度算法的计算值和观测值的时间序列。皮口站的观测和模拟能见度对比显示(见图5a),相对湿度算法仅能大体模拟出1 km以上能见度的变化趋势,液态水含量算法仅能模拟出部分大雾天气时段。融合算法很好地弥补了上述两种方法的缺陷,尤其是较好地描述出了强浓雾的等级变化以及午后能见度短暂回升的特点。成山头站的观测和模拟能见度对比显示(见图5b),相对湿度算法没能计算出此次大雾天气,而液态水含量算法仅描述出部分时段变化,新融合算法却细致地描述了整个雾过程。此外,两个站点均出现了因模式模拟液态水含量误差导致的大雾漏报和迟报等现象。

图5 2016年3月2日00时—6日00时两个代表站不同算法能见度值和观测值时间序列
4.2.2 2016年12月大雾天气过程能见度时间序列特征
本次大雾过程选取了渤海湾西侧的盐山站和山东半岛的即墨站作为代表性站点,分析了3种算法的能见度计算值和观测值的时间序列。盐山站的实况和计算能见度显示(见图6a),融合算法较好地描述了雾的等级变化,特别是强浓雾天气。相对湿度算法无法对大雾以上等级作出预报。液态水含量算法则仅仅模拟出了部分时段的浓雾天气,缺乏描述能见度连续变化的能力。即墨站的实况和计算能见度显示(见图6b),融合算法能见度值和实况变化基本一致。相对湿度算法和液态水含量算法则依旧存在上述问题。受液态水含量模拟误差的影响,两个站点的融合能见度值在部分时段同实况值有一些偏差。

图6 2016年12月17日00时—22日00时代表站不同算法能见度值和观测值时间序列
4.3 能见度新融合方法精度的主要影响因素分析
4.3.1 WRF模式预报性能对能见度新融合方法精度的影响
从雾个例的多种资料的对比结果可知,当相对湿度和液态水含量模拟较好时,新融合算法得到的能见度很好地反映出了雾等级的分布和变化。但是,当模式模拟的相对湿度整体偏大(或偏小)或出现虚假的液态水含量时,新融合方法的能见度模拟结果与观测值的误差变大。这种现象主要是因为雾的能见度计算精度受限于WRF模式对相对湿度和液态水含量的模拟能力。因此,新融合方法的能见度误差既要考虑算法本身的误差,也要考虑模式的相对湿度和液态水含量的模拟误差。
WRF模式的初始场资料误差有可能是WRF模式相对湿度和液态水含量预报误差的成因之一。WRF模式初始场资料的分析结果表明,2 m相对湿度模拟值与FNL资料基本一致,但同站点观测值存在显著差异。例如,3月4日00时WRF模拟的相对湿度较观测值整体偏小5%,均方根误差达到17%。因此,WRF模式初始场的误差可能影响模式的相对湿度和液态水含量模拟精度,并最终影响能见度计算结果。
4.3.2 通过质量控制突出新融合方法的改进效果
直接用WRF模拟结果计算雾区能见度时,模式的模拟误差会掩盖能见度的新融合方法与传统算法的差异。表2结果显示,如果直接采用模式输出结果,相对湿度算法和新融合算法两种方法的能见度预报效果均较差,模拟值与观测值的拟合系数在0.1以下,均方根误差可达4~5 km。因此,为了更好地比较不同能见度算法的效果,需要对模式的相对湿度进行质量控制。方法为:筛选研究区域内2 m相对湿度模拟值与实况值误差在±2.5%以内的站点,将其视为理想站点,仅对这些站点进行统计。表2的质控输出结果显示,两类算法特别是新融合算法的能见度模拟效果有了较大提升,拟合系数、平均偏差和RMSE普遍改善,其中RMSE最低下降到1 km左右。通过改进模式的相对湿度模拟精度,新融合算法的能见度预报效果得到显著提升。
由于缺乏液态水含量观测资料,模式输出的液态水含量质控成为难题。为此,本文根据式(6)以及地面实测能见度反演出液态水混合比估值,以此排除WRF模式模拟液态水含量偏差较大的区域。前述分析已表明,在液态水含量模拟较准确的区域和时段,融合算法能够更细致地区分大雾等级的空间分布特征,同时在时间序列变化中能够连续精确描述大雾生消变化,自身优势明显。
4.3.3 能见度新融合方法的雾预报优势分析
本文利用相对湿度质控后的WRF模式结果计算3种方法能见度,并且通过3种方法计算值同站点观测值的对比分析,展现新融合方法的雾预报优势(见图7)。结果显示,两次雾过程中液态水含量算法均仅能模拟出部分500 m以下的浓雾站点;相对湿度算法无法对低于1 km的大雾天气进行模拟。液态水含量算法和相对湿度算法在能见度模拟预报中均存在一定的缺陷,这一结果同林艳等[15]的研究结论是一致的。
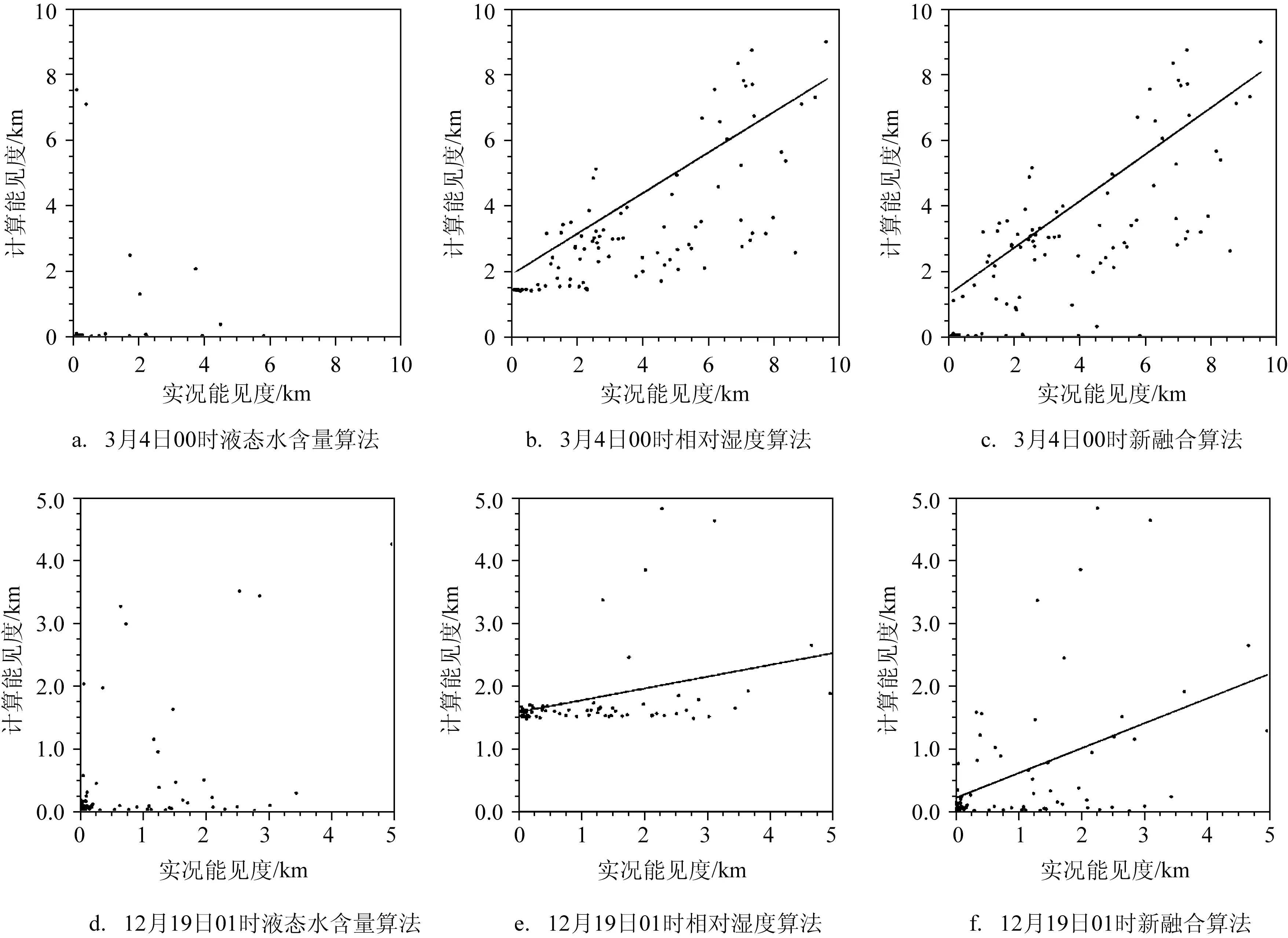
图7 研究区域内质量控制站点不同算法能见度值和实况对比
新融合方法的能见度值既吸收了前两种算法的优势,避免了其各自存在的固有缺陷,能够精确描述各等级大雾天气的空间分布和时间变化。表2质控输出结果显示,新融合算法同相对湿度算法比较,不论是拟合系数还是整体偏差都有显著改进,两个时刻的拟合系数分别提升至0.713和0.623,平均偏差也分别缩小到0.123 km和0.093 km。Bang等[18]依靠简单的统计方法融合两项指标建立了能见度方程,该方法虽然也融合了相对湿度和液态水含量,但是它同观测能见度的时间演变趋势差异较大。新融合方法同Bang等[18]的方法比较,模拟的雾能见度与实况值更为接近,物理机制也更清晰。因此,新融合算法更适用于黄渤海区域冬春季节数值模式雾天的能见度预报。

表2 2016年3月4日00时和12月19日01时研究区域站点质量控制前后两种算法能见度模拟效果对比
5 结论
为了改进相对湿度算法和液态水含量算法在雾天能见度分析中的不足,本文基于Koschmieder定律建立了一种新的融合相对湿度和液态水含量的能见度算法。选取了黄渤海区域两个代表性大雾天气个例,检验了3种算法的能见度模拟效果,得出如下结论:
(1)本文提出的新融合算法弥补了融合前两种算法在能见度分析中的不足,能更好地从整体上反映不同等级雾的区域分布和时间变化。然而,仅用液态水含量的算法描述500 m以下浓雾现象效果较好,但不能反映500 m以上雾能见度的时空连续变化。单纯的相对湿度算法可描述1 km以上轻雾天气的能见度变化趋势,但是缺乏模拟1 km以下大雾天气的能力。
(2)由于能见度新融合算法是建立在相对湿度算法和液态水含量算法的基础上,所以新融合算法的雾度量精度会受到WRF模式的相对湿度和液态水含量模拟能力限制。在相对湿度和液态水含量质量控制的基础上,新融合算法在表征雾的等级以及空间分布上同观测资料更加一致。发挥新融合算法的优势需要同时提升模式的相对湿度和液态水含量的预报准确度。
(3)新融合算法融合的相对湿度算法经过了山东地区历史观测资料的订正,该新方法适合黄渤海地区冬春季的大雾能见度预报。然而,在其他区域和时段应用时,需要根据地区气候条件适度调整算法参数。
在今后的工作中,需要进一步改进新融合算法使用的能见度相对湿度算法和液态水含量算法的计算精度。虽然相对湿度算法在利用观测能见度和相对湿度建立统计关系时间接考虑了气溶胶对能见度的影响,但是能见度的精确预报还需要考虑固态气溶胶粒子的形态影响,液态水含量算法的改进还需要考虑液态水粒子数浓度的影响。
