天文算法与倾角传感器反馈相结合的光伏跟踪系统设计
2021-09-03黄家兵
王 琪,黄家兵,沈 妍,彭 程,朱 超
(1.江苏科技大学机电与动力工程学院,苏州 215600;2.苏州聚晟太阳能科技股份有限公司,苏州 215600)
0 引言
天气状况、昼夜交替、季节更迭、地理位置差异等自然环境因素会对光伏发电产生较大影响,因此提高光伏发电系统的发电效率和工作稳定性显得至关重要。通过改变光伏组件的倾角可使光伏组件尽量正对着太阳直射光,这是提高光伏组件发电量的有效方式之一[1],而将光伏组件和平单轴跟踪光伏支架相结合,根据GPS提供的数据,利用天文算法来确定太阳位置,通过电动推杆动作来控制光伏支架上光伏组件的倾角,可实现光伏组件的追日跟踪。但此种跟踪方式较为单一,并且采用的是开环控制方式,具有精度较低、存在累积误差的缺点。本文对上述方法进行了改进,在利用GPS提供的数据的基础上,提出了一种将天文算法和倾角传感器反馈相结合的光伏跟踪系统。该系统采用闭环控制方式,并且针对光伏组件倾角过大会产生阴影遮挡的问题,在正跟踪模式的基础上引入了逆跟踪模式。该系统主要有4种工作模式,其会根据不同的状况采用不同的工作模式,且能根据不同地理位置、日期、天气等情况调整平单轴跟踪光伏支架的工作状态。
1 光伏跟踪系统工作模式的设计
本文所述光伏跟踪系统中的GPS模块用于提供经度、纬度、日期、时间等数据[2]。该系统通过天文算法计算出太阳的实时位置后,据此来调整其理论跟踪角度,由此来改变安装于平单轴跟踪光伏支架上的光伏组件倾角,并且利用倾角传感器实时反馈系统的实际跟踪角度。当实际跟踪角度与理论跟踪角度一致时,即实现了光伏组件的追日跟踪。此种闭环控制方式能通过倾角传感器反馈量来消除累计误差,使光伏跟踪系统在长时间运行时仍能具有较高的精度。本文所述光伏跟踪系统的控制原理图如图1所示。
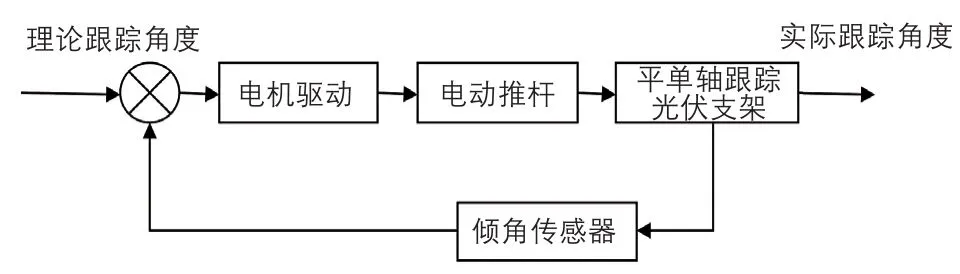
图1 本文所述光伏跟踪系统的控制原理图Fig. 1 Control principle diagram of PV tracking system described in this article
该光伏跟踪系统主要有正跟踪模式、逆跟踪模式、固定倾角模式和手动模式4种工作模式,会根据不同的情况选择不同的工作模式。
1.1 正跟踪模式
在正跟踪模式下,照射到光伏组件平面上某点的太阳直射光线应尽量与光伏组件平面垂直。而确定平单轴跟踪光伏支架上的光伏组件倾角时,需要考虑到太阳相对于光伏组件的位置,该位置可以在地平坐标系中通过天文算法计算得到[3],计算时涉及到的参数包括赤纬角δ、时角ω、太阳高度角α和方位角λ。
赤纬角δ用于表示太阳和地球中心的连线与地球赤道所在平面之间的夹角,中国气象科学研究院的研究员王炳忠曾提出一种高精度计算δ的方法,称作“Wang算法”[4]。该算法的表达式为:
式中,N为积日,即从每年的1月1日到计算日当天的天数;N0为积日的修正常数,其考虑了积日类差和闰年的影响,近似取值为79.67。
时角ω是指测量地所在的子午圈与太阳直射点所在的经线之间的夹角,其随时间变化而变化。ω的计算式可表示为:

式中,ts为测量地的真太阳时。
ts可表示为:

式中,t0为北京时间;J为测量地的经度,西经时取“+”,东经时取“–”;E为时差。
其中,E可表示为:

太阳高度角α是指太阳直射光线与其在水平面上投影的夹角。α的计算式可表示为:

式中,f为测量地的纬度。
方位角λ是指太阳直射光线在水平面上的投影偏离正南方向的角度。λ的计算式可表示为:

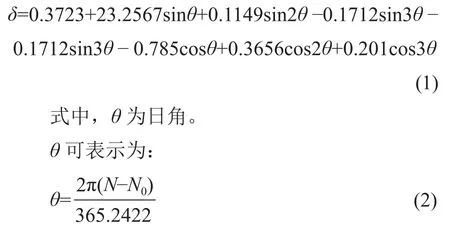
当光伏跟踪系统采用正跟踪模式时,太阳直射光线L在光伏组件受光面上的投影应尽量与光伏支架主梁所在轴线重合,即L在ZOY平面上的投影L0应尽量垂直于光伏组件,此时太阳直射光线的入射角最大,具体如图2所示。图中,α0为L0与Y轴的夹角。
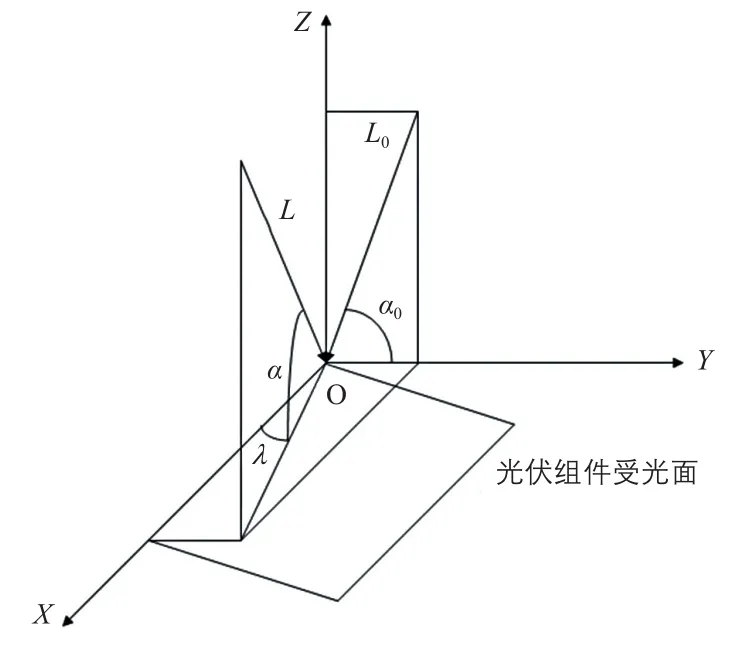
图2 太阳直射光线在光伏组件受光面上的投影示意图Fig. 2 Schematic diagram of projection of direct sun rays on light-receiving surface of PV modules
α0的计算式可表示为:

在正跟踪模式下,α0与光伏组件倾角α1互为余角,二者的关系示意图如3所示。图中,α2为理论跟踪角度,其由光伏跟踪系统中的控制单元根据相应计算得到。
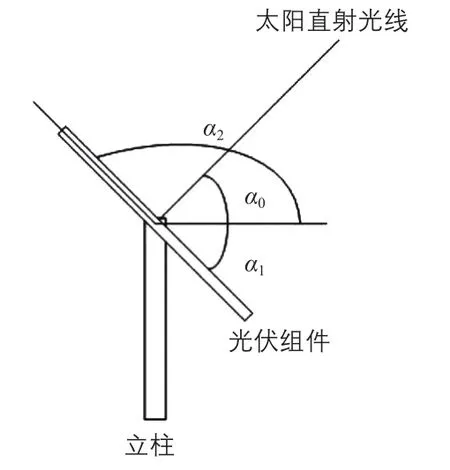
图 3 α0与 α1的关系示意图Fig. 3 Schematic diagram of relationship between α0 and α1
α0、α1及α2的关系式可表示为:

1.2 逆跟踪模式
由于在日出和日落时α的值较低,若此时光伏组件受光面仍正对着太阳直射光线,则会对其后排的光伏组件产生阴影遮挡[5];而阴影遮挡会使光伏组件的发电量显著下降,因此需要引入逆跟踪模式,以规避阴影遮挡的情况。根据GB 50797-2012《光伏发电站设计规范》的规定,无论是固定式光伏支架还是跟踪式光伏支架,均要求所在地冬至日当天09:00~15:00时段内相邻光伏支架之间互不遮挡。由于在09:00~15:00时太阳辐照度最强,此时最好保证跟踪式光伏支架的工作模式处于正跟踪状态[6]。由此,可计算得到相邻光伏支架东西向最小间距D,其计算式为:

式中,B为单个光伏组件的宽度;d为太阳直射光线在相邻光伏支架间的地面投影长度。
其中,d可表示为:

光伏跟踪系统采用逆跟踪模式后,α0与α1不再互为余角,正跟踪模式下的算法不再适用于此时的平单轴跟踪光伏支架,需要单独计算此种模式下的光伏组件倾角,其示意图如图4所示。
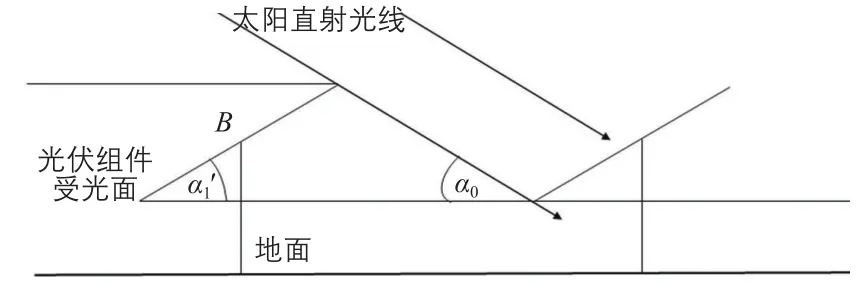
图4 逆跟踪模式下的光伏组件倾角示意图Fig. 4 Schematic diagram of PV module tilt angle in reverse tracking mode
可表示为:

逆跟踪模式下的理论跟踪角度可表示为:

1.3 固定倾角模式
为了保证平单轴跟踪光伏支架在户外长期运行的可靠性和稳定性,并方便工作人员对光伏支架进行安装、调试和维护,光伏跟踪系统会在以下几种状况时采用固定倾角模式。
1)阴雨天气时。由于晴天时太阳辐照度对光伏组件发电量的影响较大,因此可以根据所在地太阳辐照度情况来适时调整平单轴跟踪光伏支架的工作状态。但阴雨天气时,由于太阳辐照度随时间变化的趋势不明显且此时的太阳散射光对光伏组件发电量的影响较大,因此若此时光伏支架仍保持晴天时跟踪太阳直射光的状态,随着太阳方位而转动,会额外增加其电机的电量消耗。综上分析,在连续阴雨天气时,光伏跟踪系统会通过远程控制系统将此时的理论跟踪角度固定在185°并停止追日跟踪。
2)光伏组件清洗时。灰尘覆盖会对光伏组件性能产生较大影响,当光伏组件上覆盖的灰尘量达到12.64 g/m2时,其相对发电量将会下降20%左右[7]。由于光伏电站中光伏组件的尺寸较大,因此为了方便光伏组件清洗,此时光伏跟踪系统采用固定倾角模式,将理论跟踪角度固定在135°。虽然在组件清洗前需要检测是否存在风速异常的情况,但在组件清洗时光伏跟踪系统不需要启用计时恢复功能。
3)光伏支架处于防风状态时。由于光伏组件采用薄板结构,光伏支架采用轻钢结构,因此在大风天气时,二者均容易被破坏。风向不同对光伏组件产生的影响也会不同,光伏跟踪系统利用风速风向传感器实时检测风速、风向。当风速大于光伏跟踪系统工作风速阈值时,光伏跟踪系统将采用固定倾角模式,会将光伏组件以迎风倾斜5°放置[8],即此时的理论跟踪角度设定为175°或185°。当光伏支架进入防风状态后,控制程序会延时一段时间,此时的光伏支架继续保持静止;当延时结束后,光伏跟踪系统会再次比较风速值,判断是否恢复跟踪状态。
4)光伏支架处于防雪状态时。由于大雪时容易出现积雪压塌光伏组件及支架结构的情况,而且积雪不融化或在光伏组件表面化霜结冰会严重影响光伏组件的工作状态。因此,在大雪或易积雪天气时光伏跟踪系统的理论跟踪角度会保持135°不变,使大雪不易积累在光伏组件表面。大雪天气时常伴随大风,在光伏支架进入防雪状态前,应先检测风速是否存在异常,若无异常则光伏支架会根据上位机指令进入防雪状态。
5)光伏支架处于夜间状态时。根据天文算法可得到所在地不同时刻的α值,当傍晚α≤0°时,光伏支架进入夜间状态,光伏跟踪系统采取固定倾角模式,理论跟踪角度固定为185°;而当早晨α>0°时,则进入跟踪模式。
1.4 手动模式
为方便工作人员对光伏跟踪系统进行现场安装调试,增加了手动模式,即利用按键和单片机指令来实现控制电机的正向和反向转动,以方便临时调整光伏组件的倾角。
2 硬件电路的设计
该光伏跟踪系统的硬件电路基于STM32单片机进行设计,硬件电路主要由电源单元、通信板、控制单元、电机、驱动单元等几大部分组成[9]。其中,通信板用于采集GPS提供的数据及风速风向仪测得的数据等信息,并将数据处理后传送给控制单元,控制单元通过相应计算得出理论跟踪角度,并将该角度与倾角传感器反馈的实际跟踪角度进行对比。为完善该光伏跟踪系统的功能,通信板还包括了可进行防雪、组件清洗等操作的按钮,控制单元还包括启用手动模式时的按钮、时钟芯片等部件。硬件电路的框架图如图5所示。
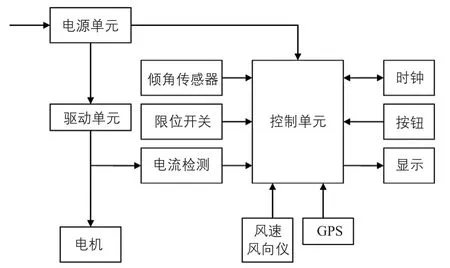
图5 硬件电路的框架图Fig. 5 Frame diagram of the hardware circuit
控制单元采用意法半导体集团生产的STM32F0x芯片,负责对GPS、倾角传感器、风速风向仪等反馈的数据进行采集、分析及计算。STM32F0x系列产品基于超低功耗的ARM Cortex-M0处理器内核,因运行高速、低成本、低功耗的特点被广泛应用于经济型控制系统。
采用单片机内部时钟时,内部时钟会受到外部晶振的影响,而环境温度对外部晶振的影响较大,最终导致内部时钟的时间存在一定的误差。因此在设计该光伏跟踪系统时,额外增加了高精度时钟芯片DS3231,该芯片内部含有集成的温度补偿晶体振荡器,具有较强的适应外部环境温度变化的能力。此外,备用电池可为此时钟芯片提供断电后的续航,时钟中的存储芯片可以存储断电后的时间信息,从而保证了光伏跟踪系统恢复工作后时间上的连续性。
整个电路系统要求电源单元为其提供大小合适且稳定的电力。比如,通过外部的AC/DC电源单元将220 V交流电转变为24 V直流电后,可通过LM2596开关型集成稳压芯片和隔离电源获得+5 V的输出电压,通过SPX1117型低压差稳压芯片可获得3.3 V的输出电压,然后分别为不同电压要求的芯片组件供电。此外,该控制单元通过H桥电路控制驱动电机正向和反向运行[10],并且利用驱动芯片监测电机的电流。
3 实验数据测试与分析
通过上述公式可计算得到一天之中光伏跟踪系统采用有逆跟踪模式和无逆跟踪模式时的理论跟踪角度。计算时的时间取2019年5月7日,地点选为江苏省张家港市(120°E,31°N),光伏组件宽度为1.2 m,相邻光伏支架东西向最小间距取2.5 m。绘制时刻-理论跟踪角度曲线图,结果如图6所示。
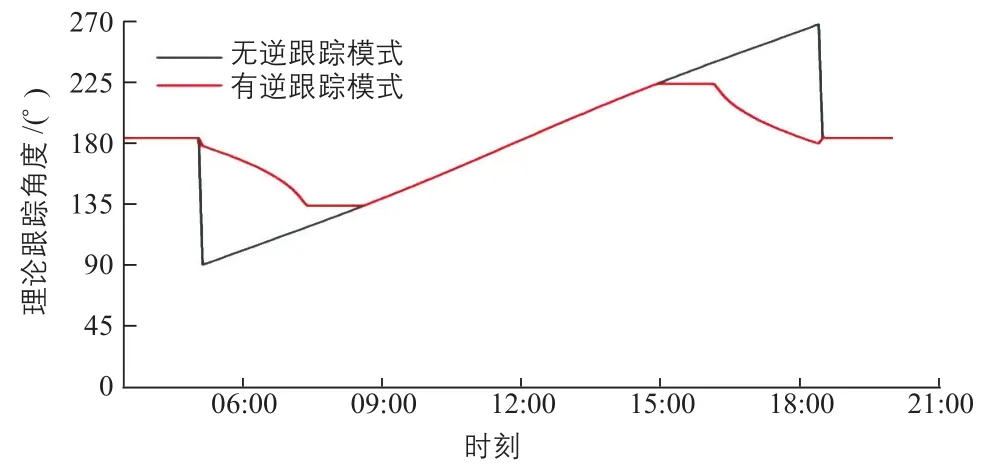
图6 时刻-理论跟踪角度曲线Fig. 6 Curve of time-theoretical tracking angle
由图6可知,在无逆跟踪模式下,日出(05:20)后理论跟踪角度由夜间状态时的180°转变为90°左右,这说明跟踪系统采用了正跟踪模式,此时光伏组件受光面正对着太阳直射光;然后随着时间的变化,日落(18:40)后,理论跟踪角度固定为185°,这说明光伏支架再次进入夜间状态。在有逆跟踪模式下,日出(05:20)后,跟踪系统经过短暂的调整阶段后在05:25~07:35时进入逆跟踪模式,之后由于控制单元和限位组件对光伏组件进行了限位保护,理论跟踪角度达到135°时保持静止,因此出现一段平滑直线;在08:45~15:00之间时,理论跟踪角度值呈线性变化并升至最大值,这表明此时跟踪系统采用了正跟踪模式;在15:00~16:20,同样由于限位保护的原因,理论跟踪角度保持在225°,随后,跟踪系统再次经过一段时间的逆跟踪模式后,理论跟踪角度降至185°,光伏支架进入夜间状态。
为验证光伏跟踪系统的控制单元在带负载运行时的可靠性,在江苏省张家港市(120°E,31°N)某科技园户外实验区进行光伏跟踪系统采用有逆跟踪模式时控制单元的带负载实地测试,并对光伏跟踪系统的实际跟踪角度进行了统计。测试日期为2019年5月7日,光伏组件的宽度为1.2 m,相邻光伏支架的东西向最小间距为2.5 m。测试当天光伏跟踪系统的时刻-实际跟踪角度曲线如图7所示。
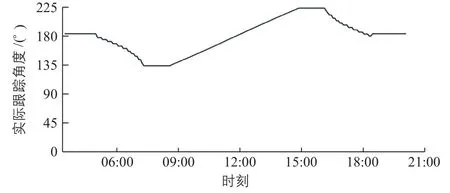
图7 时刻-实际跟踪角度曲线Fig. 7 Curve of time-actual tracking angle
将光伏跟踪系统采用有逆跟踪模式时的实际跟踪角度与理论跟踪角度进行对比,并绘制相对于理论跟踪角度而言,实际跟踪角度的角度误差柱状图,如图8所示。由图8可知,逆跟踪阶段(05:20~07:30和16:25~18:35)的实际跟踪角度与理论跟踪角度的跟踪角度误差范围在±3°,正跟踪阶段(07:30~16:25)的跟踪角度误差范围在±1°之内,符合《太阳能光伏发电系统用对日单轴跟踪系统标准概要》中跟踪精度在±10°以内的设计要求。
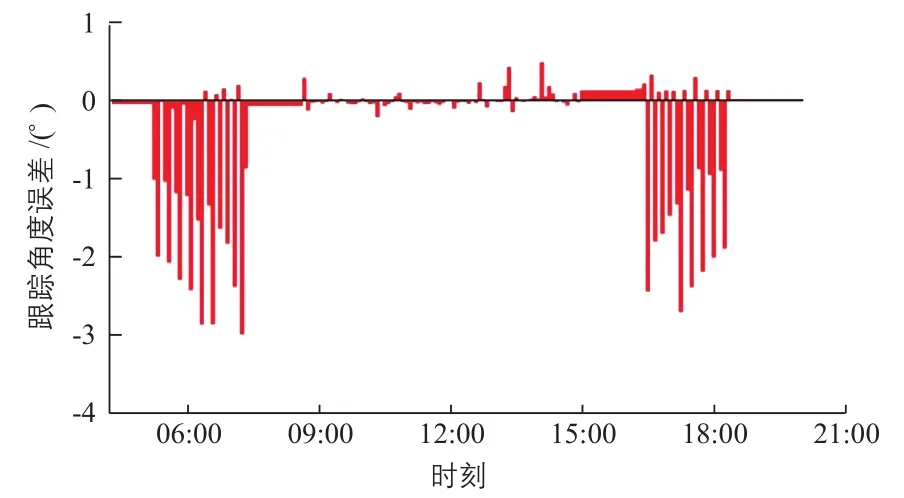
图8 跟踪角度误差柱状图Fig. 8 Histogram of tracking angle error
产生跟踪角度误差的原因主要有:电动推杆调整的过程需要耗费时间,此时的理论跟踪角度也在实时变化,导致跟踪角度误差较大;带负载运行时或存在风荷载时均会对光伏支架结构产生细微影响,甚至会使光伏支架发生微小抖动;传感器及测量工具在安装和测量时人为造成的误差。
4 结论
本文提出了一种将天文算法和倾角传感器反馈相结合的光伏跟踪系统,其能够实现较高精度的追日跟踪,克服了太阳光的变化对光伏跟踪系统的影响;鉴于在实际环境中的工作状态,该系统还增加了逆跟踪模式、固定倾角模式、手动模式等工作模式。该系统基于STM32单片机进行电路设计,并进行实现了测试,测试结果表明,光伏跟踪系统采用有逆跟踪模式进行追日跟踪时,在正跟踪阶段的跟踪角度误差在±1°以内,逆跟踪阶段的跟踪角度误差在±3°以内,能有效提高光伏发电系统的整体经济效益。
