基于双目视觉位移视频监控技术的漂浮式水上光伏电站浮筒位移监测的研究
2021-09-03杨志银
杨志银
(协鑫能源工程有限公司,苏州 215100)
0 引言
根据Research And Markets发布的《2019年全球漂浮式太阳能市场报告》显示,2017年,全球漂浮式水上光伏电站的累计装机容量为675.38 MW,预计到2024年该值将增至4127.567 MW,2018~2024年的年复合增长率预计为30.7%[1]。漂浮式水上光伏电站的实景图如图1所示。

图1 漂浮式水上光伏电站的实景图Fig.1 Photo of floating water PV power station
漂浮式水上光伏电站装机容量的增长主要归因于土地资源日益受限,且水体对光伏组件具有冷却效应,可提高光伏组件的发电量;此外,得益于光伏行业中部分企业对与漂浮式水上光伏电站相关的光伏产品的研发投资不断增加,再加上政府对于此类光伏电站给予的各种支持,预计此类光伏电站的市场需求还将继续增加[1]。
但是漂浮式水上光伏电站的发展对浮筒的锚固技术要求很高。相较于地面光伏电站,漂浮式水上光伏电站会受到季风、水位变化的影响,使浮筒发生位移,导致照射到光伏组件的太阳入射角发生了改变,从而降低了光伏电站的发电量,且会影响锚固系统钢缆的使用寿命,因此对漂浮式水上光伏电站的浮筒位移进行监测尤为重要。
2019年12月16日,中国能源建设集团山西省电力勘测设计院有限公司(下文简称“山西院”)收到泰国发电管理局(EGAT)发出的中标通知书,确认山西院与泰国B.Grimm公司组成的联合体成功中标EGAT诗琳通大坝水面浮体光伏项目。EGAT诗琳通大坝水面浮体光伏项目是泰国目前最大的漂浮式水上光伏发电项目,也是泰国最大的“水电+光伏+储能”综合能源项目。该项目规划的光伏发电装机容量为58.5 MWp,位于泰国东北部乌汶府的诗琳通大坝,距曼谷约655 km。该项目所处水域的平均月最大风力可达11级(风速28.5~32.6 m/s)以上,具体如表1所示。

表1 诗琳通大坝的风力水平Table 1 Wind level of Sirindhorn dam
业主方EGAT对该漂浮式水上光伏电站中浮筒的锚固方案非常重视,同时对浮筒在恶劣气候环境下的位移、抖动幅度提出了比较严格的监测要求,当浮筒的位移及抖动幅度超越警戒线时,需及时向运维平台发出报警信号。
目前针对大范围的表面位移监测多采用基于北斗/GPS位移实时监测技术的位移监测系统[2],其中,普通定位传感器的误差约为10 m,但10 m的误差远大于浮筒允许的位移范围;而高精度定位传感器的价格高昂,其对卫星信号的要求也较高,且其无法满足漂浮式水上光伏电站对浮筒抖动监测的需求。因此,行业内暂无基于北斗/GPS位移实时监测技术的漂浮式水上光伏电站浮筒位移监测的解决方案。
基于此,本文从进行视频监控时的越界侦测、移动侦测角度出发,提出了一种可应用于漂浮式水上光伏电站的基于双目视觉位移视频监控技术的浮筒位移监测方案,通过双目视觉位移视频监控技术可提高越界侦测、移动侦测的精准度,同时视频摄像头能实时记录浮筒越界、移动过程的图像信息,便于光伏电站的运维人员分析处理。
1 越界侦测及移动侦测
越界侦测是指在单个视频摄像头监控范围内设置一条警戒区域线,即警戒线,若视频中有物体跨越设置的警戒线,根据判断结果联动报警。比如,针对一条道路进行监控时,若在横跨路面的位置设置1条警戒线,当有车辆或行人穿越设定好的警戒线时就会触发报警。目前常用的越界侦测方法有帧间差分法、背景减法和光流法等,这些方法都是通过从视频序列中检测运动目标来实现越界报警的功能,但此类方法中视频图像所涵盖的地域范围较小,例如交通路口、仓库大门处的监控图像。针对越界侦测的区域边界较大,特别是对于一些位于野外、地势复杂的大面积区域,单个视频摄像头就无法满足需求。
移动侦测是指在单个视频摄像头监控范围内对快速移动的现象进行检测,例如对非法追跑、道路超速等现象进行事件检测,当发生快速移动且超出预设警戒值时设备将发出报警,通知监控主机有快速移动现象产生,向相关人员预警。
2 基于视觉的位移侦测
自然界中,人和动物都是2只眼睛,这是自然生存竞争的需要,仅1只眼睛无法对1个物体的距离进行准确定位,例如只睁1只眼睛进行穿针就会很难成功,而双眼却可以分清物体的远近。双摄像头就是模拟人眼的应用。当人用2只眼睛观察物体时,由于人的2只眼睛扫描物体的位置和角度不同,因而物体在两眼视网膜的成像存在差异,产生了微小的水平像位偏差,即视差。视差是客观存在的物理现象,是外部世界给予眼睛的深度信号,经大脑综合加工处理后,产生了能准确感知三维空间各种物体深浅高低、前后远近及凸凹状态的立体视觉功能[3],从而达到了人和动物可适应环境、寻找食物、防卫敌害、以求生存的目的。由于用2只眼睛观察周围环境比用1只眼睛更准确和更精细,因此根据双目视觉成像原理,选择2个物理参数相同的摄像机,从不同的位置拍摄漂浮式水上光伏电站,从而获取2张不同的三维投影图像,再通过相应的算法,即可以计算出漂浮式水上光伏电站的精确边界,并可对所选出的参考点的移动轨迹进行侦测。
对于物体的位移,下文选取不同的参考点,分别从单目视觉和双目视觉位移侦测原理出发,分析参考点的位移。
2.1 单目视觉位移侦测
基于单摄像头的单目视觉位移侦测原理图如图2所示。图中,f为摄像机透镜的焦距,是可通过摄像机参数获取的常数;z为成像平面与物体的垂直距离,可以通过摄像机标定得出;P、Q 均为位移前的参考点;P′、Q′、Q′′均为位移后的参考点;P1、Q1分别为P、Q的镜面成像点;P2为P′的镜面成像点;Q2为Q′、Q′′的镜面成像点。
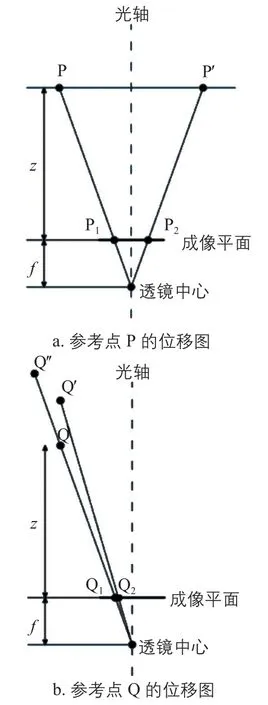
图2 单目视觉位移侦测原理图Fig. 2 Schematic diagram of monocular visual displacement detection
根据相似三角形原理可得到[4]:

由于参考点的实际位移大小与其位移前、后成像点的位置有关,因此可通过判断P1到P2的位移大小侦测参考点P的实际位置变化[4]。
基于单摄像头的单目视觉位移侦测系统过于简单,其实际应用中的局限性较大,测量过程中需保持摄像头与待测平面垂直,稍有偏差就会影响到测量的准确度。比如图2b中的参考点Q,当单摄像头位置固定后,若Q移动到Q′,此时无法使用相似三角形原理计算其实际移动距离,当Q沿成像点Q1作反向延长线移动时,成像点位置不变,无法计算出Q到Q′′的距离,因此无法侦测出参考点的位置变化。
2.2 双目视觉位移侦测[5]
选取漂浮式水上光伏电站浮筒外围边沿的一点S作为参考点,基于双摄像头的双目视觉位移侦测原理图如图3所示。图中,M光轴与N光轴分别为摄像机M和摄像机N的光轴。当摄像机M、摄像机N同时观测参考点S时,参考点S在左侧摄像机(摄像机M)成像的像点为SM,在右侧摄像机(摄像机N)成像的像点为SN。摄像机存在透镜中心,摄像机M和摄像机N的透镜中心点分别以CM和CN表示;CMSM为左侧摄像机M的透镜中心CM与像点SM确定的唯一射线,且参考点S必在该射线上;同理,CNSN为右侧摄像机N的透镜中心点CN和像点SN确定的唯一射线,且参考点S也必在该射线上;CMSM和CNSN这2条射线的交点即为参考点S的位置。摄像机M和摄像机N的成像中心OM、ON分别为M光轴、N光轴与成像平面的垂直交点;x1为SM与OM的距离;x2为SN与ON的距离;b为中间量,辅助计算,无实际意义;d为2个摄像机的透镜中心之间的距离。因此,若摄像机参数已知,那么就可以利用相似三角形原理计算出参考点S的空间位置坐标[5]。

图3 双目视觉位移侦测原理图Fig. 3 Schematic diagram of binocular visual displacement detection
由几何理论可知:
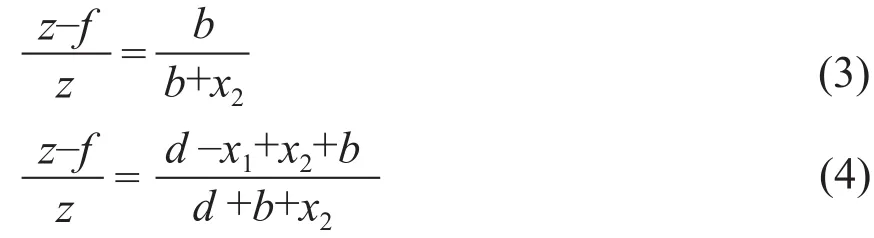
将式(3)、式(4)联立求解可得:

当双目视觉位移侦测系统中双摄像头的位置固定时,f和d为已知参数,此时z仅与x1-x2有关。
若只有单台摄像机M且其位于参考点S的左侧,则参考点S只能沿摄像机M的透镜中心点CM与像点SM唯一确定的射线CMSM移动,像点SM不会发生变化,此时x1的值不变,因此单摄像头位移侦测系统过于简单,具有较大的应用局限性。而双目视觉位移侦测系统是通过2台固定位置的摄像机模拟人的双眼对参考点S进行位移侦测,当S点的位置发生变化时,2台摄像机中的像点至少有1个会发生变化(即x1、x2至少1个值会发生变化),因此2台摄像机的透镜中心点和像点形成的2条射线CMSM、CNSN会发生改变且有唯一的交点,而该交点即为参考点S的新坐标点。
3 应用方案设计
利用双目视觉位移侦测技术、智能传感技术、物联网技术,构建可实现实时监测、预警预报、事件记录、辅助决策功能的浮筒越界侦测、移动侦测方案。利用闭路电视(CCTV)系统的专业分析软件处理图像信息,当浮筒出现移动、越界时记录事件,并将图形显示和报警上传至人机界面(OIS)。漂浮式水上光伏电站的CCTV系统的工作原理图如图4所示。

图4 漂浮式水上光伏电站的CCTV系统的工作原理图Fig. 4 Working principle diagram of CCTV system of floating water PV power station
在漂浮式水上光伏电站岸边选择视野开阔便于监测的2个固定摄像机安装点,这2台摄像机的参数需相同且保持一定距离安装。根据上述双目立体成像原理,并通过相应的算法计算得出漂浮式水上光伏电站浮筒的精确外围边界,以及所选择的参考点的位置坐标后,在漂浮式水上光伏电站允许移动的范围内对计算出的浮筒外围精确边界做相应的放大处理,形成新的边界,即形成用于越界侦测的警戒线。漂浮式水上光伏电站的浮筒越界侦测示意图如图5所示,图中,红线为警戒线;绿线区域为业主方提供的可用于建设电站的水域。

图5 漂浮式水上光伏电站的浮筒越界侦测示意图Fig. 5 Schematic diagram of transboundary detection of buoys of floating water PV power station
需要说明的是,由于部分漂浮式水上光伏电站建设在大型水库,水位变化落差较大,针对这种情况,可以根据不同的水位测绘出多个警戒线,当水位变化到视频监控系统预设的水位范围时,启用相应的警戒线作为越界侦测的判据。
在漂浮式水上光伏电站的外围浮筒的边缘处设置比较醒目的用作观察的参考物作为标记点,如图5中所选择的标记点A~I ,当图中所选择的标记点移动触发警戒线时,CCTV系统会拍照记录,并将图形显示和越界侦测报警上传至OIS通知运维值班人员。越界侦测方案的实施流程图如图6所示。

图6 越界侦测方案的实施流程图Fig. 6 Implementation flow chart of transboundary detection scheme
对于越界侦测方案的实施,在施工前的准备阶段需根据项目的实际情况分析、计算2个摄像头的安装高度和角度;而建模、生成越界警戒线为本方案的关键,需根据项目地的历史水位数据设置多组越界警戒线定值;在模拟动态测试阶段要做到对各个特殊位置参考点进行反复测试,当参考物越界时,系统应可靠报警且已记录越界过程画面,并确保无越界行为时系统不误报。
双目视觉位移视频监控技术除可应用于漂浮式水上光伏电站的浮筒位移越界侦测,还可应用于浮筒移动侦测。当水面风浪较大时,设置在浮筒上的参考物随浮筒大幅度快速摆动,通过视频监控的快速移动侦测功能,对参考物的移动设置1个快速移动灵敏度警戒值,当风浪较大、参考物抖动超过设置的快速移动灵敏度警戒值时,CCTV系统会拍照记录,并将图形显示和快速位移(抖动)侦测报警上传至OIS通知运维值班人员。
4 结论
本文提出了一种基于双目视觉位移视频监控技术的漂浮式水上光伏电站浮筒位移监测方法,从视频监控的角度出发,基于对视频监控的越界侦测、位移侦测功能深度开发,通过设置2台位置固定的摄像机,利用双目视觉位移视频监控技术提高了位移监测的精度,打破了单个摄像机应用环境的局限性。双目视觉位移视频监控技术可应用于侦测浮筒位移越界及浮筒移动,并通过视频监控系统与OIS联动向运维值班人员发出报警,使发生浮筒位移时运维人员可及时处理,以降低经济损失。
