超静空间科学卫星分离式主动隔振技术
2021-09-03杨鸿杰刘磊李新国
杨鸿杰,刘磊,*,李新国
1. 西北工业大学 航天学院,西安 710072 2. 陕西省空天飞行器设计重点实验室,西安 710072
1 引言
中国正在从航天大国向航天强国迈进,对空间科学领域的重视程度逐步增加。随着实践十号微重力科学实验卫星[1],“墨子号”量子科学实验卫星[2]等成功实施,中国正在规划下一步空间科学实验课题,研究包括空间天文观测、空间基础物理和空间生命科学等在内的关键课题[3]。这些空间科学实验搭载的先进载荷或关键设备要求航天器微振动功率谱密度的积分值在10-6gn量级,目前常规卫星平台很难满足先进载荷对微振动频谱积分的指标要求,急需发展面向超静空间科学卫星的微振动隔离技术[4]。
卫星上的运动部件,包括控制力矩陀螺、太阳能电池板驱动机构和制冷机等,是产生微振动的主要原因[5]。卫星的微振动量级虽小,但是对高精密设备的影响不可忽视,例如幅值为20 μm的微振动将会导致对地遥感卫星拍摄图像的清晰度下降超过50%[6]。国际空间站上的科学载荷在频谱要求0.1 Hz处微振动幅值不超过1.6×10-6gn[7]。
为了满足先进空间载荷对微振动环境的要求,国内外学者对星上微振动隔离技术开展了大量研究[8]。从扰动传递路径上分类,卫星微振动控制可分为扰源隔振、传递路径隔振和载荷隔振[5]。中国风云四号卫星为干涉式大气垂直探测仪设计的振源和载荷两级隔振系统,可将振源到载荷安装面的微振动量级降低到0.1 mgn以下[9],但隔振级数增加会导致结构质量增加。引力波探测卫星LISA Pathfinder[10]和重力场测量卫星 (gravity field and steady-state ocean circulation explorer, GOCE)[11]等为了满足无拖曳控制的需求,通过降低星上可动部件的使用、使用微推力器替代飞轮进行姿态和轨道控制,提高卫星结构刚度等措施对卫星平台进行超静超稳设计,但对整星进行超静超稳设计存在研发成本高,适用任务单一等不足。
为了避免对整星进行超静超稳设计,Pedreiro提出了一种分离式卫星平台[12]。分离式卫星平台在传统卫星平台的基础上,将星上扰源和敏感载荷模块划分成载荷模块和服务模块,并通过非接触作动器对载荷模块进行姿态和位置控制[12]。这种分离式设计不仅适用于大型载荷,如大型空间望远镜[12]等,也可用于小型载荷,如编队载荷[13]等。在理想情况下,分离式卫星平台两模块之间无刚性连接,载荷模块可完全隔离服务模块的振动。但是两模块之间需要通过必要的柔性线缆来实现信息交换和能量传输,柔性线缆提供了从服务模块到载荷模块的扰动传递路径[14]。目前的文献集中在研究这种分离式卫星平台的动力学建模和高精度指向控制[15],缺乏对载荷模块微振动控制的研究。
本文考虑分离式卫星两模块之间连接有柔性线缆和防碰撞限位弹簧,研究两模块的动力学建模方法,以及从服务模块到载荷模块的扰动传递特性。综合科学卫星主动隔振的带宽需求和加速度频谱积分的指标需求,设计载荷模块的六自由度主动隔振控制器,并通过数值仿真分析主动隔振控制器的有效性,为分离式隔振技术工程化应用提供设计参考。
2 分离式科学卫星动力学建模
2.1 坐标系描述
传统卫星的微振动频谱范围宽,扰动来源复杂且耦合性严重。微振动在几赫兹到几百赫兹频率范围内振动能量较大。针对卫星微振动频谱范围宽,扰动来源复杂的特点[5],分离式主动隔振把传统卫星模块划分为服务模块和载荷模块,两个模块之间通过柔性线缆和弹簧进行连接。星上的扰动源,例如反作用飞轮、制冷机、太阳翼驱动机构等,均安装服务模块;而载荷模块上仅安装高精度敏感载荷。因此分离式主动隔振技术可适用于隔离不同扰动频谱特点卫星平台的微振动。为了描述两模块的运动,建立如图1所示的坐标系。
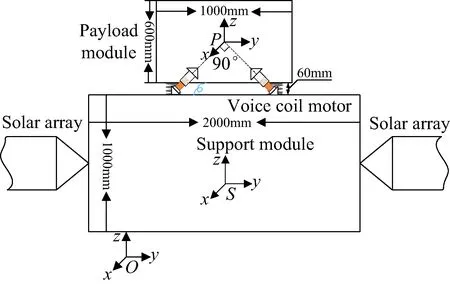
图1 分离式卫星的坐标描述Fig.1 Coordinate system of the distributed satellite
如图1所示,Oxyz代表惯性坐标系,Sxyz代表服务模块的本体坐标系,Pxyz代表载荷模块本体坐标系。假设服务模块的外形尺寸为2 m×2 m×1 m,载荷模块的外形尺寸为1 m×1 m×0.6 m,两模块之间相距60 mm。载荷模块的姿态和位置通过八个非接触音圈作动器(voice coil motor,VCM)来控制。音圈作动器安装在载荷模块的四个侧面,每个侧面安装两个,两两呈90°分布。
为了实现两模块之间的数据传输和能源供应,载荷模块和服务模块之间连接有柔性线缆。柔性线缆可对载荷模块产生六自由度的扰动力/力矩。为了提高两模块之间的防碰撞性能,在载荷模块和服务模块的连接界面上沿z方向安装有4根限位弹簧,限位弹簧可提供三个线自由度的弹簧力。
2.2 分离式科学卫星动力学模型
在卫星姿态小角度变化的假设下,分离式卫星服务模块的线性化姿态动力学方程可写成:
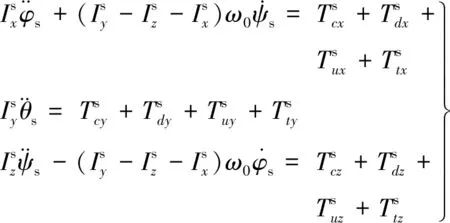
(1)
根据牛顿欧拉方程,分离式卫星载荷模块的动力学方程可写成:

(2)
式中:Mp和Ip分别是载荷模块的质量和转动惯量矩阵;rp和ωp分别是载荷模块的位置和转动角速度;Fp和Tp分别代表施加到载荷模块的力和力矩。
施加到载荷模块和服务模块上的扰动力/力矩主要来源于两个方面:①空间环境;②柔性线缆和限位弹簧因变形产生的力和力矩。其中柔性线缆和限位弹簧施加到两模块上的扰动力和力矩等大反向。柔性线缆因变形产生的扰动力和力矩可用实验测量的等效弹性系数和等效阻尼系数来计算。一般情况下柔性线缆通过接插件安装在两模块的表面,假设柔性线缆在两模块的安装位置分别是cs和cp,则施加到载荷模块上的扰动力和力矩可表示成[16]:

(3)

限位弹簧因两模块相对运动产生的扰动力可表示成:
式中:fx、fy和fz分别是限位弹簧在安装位置处施加到载荷模块的力;kx、ky和kz分别是限位弹簧沿三个方向的弹性系数;Δlx、Δly和Δlz分别是限位弹簧沿x、y和z三个方向的变化量。
限位弹簧沿x、y和z三个方向的变化量与两模块的姿态和位置具有如下运动学关系:


(4)

(5)
求解得到限位弹簧的弹簧力作用在两模块的安装位置,需要转换成过两模块质心的力和相对于质心的力矩,根据虚功原理有[17]:

(6)

(7)
式中:Kz为弹簧的弹性系数矩阵。
相同的,音圈作动器施加到载荷模块上的主动控制力也需要转换成过两模块质心的控制力和控制力矩:
(8)

(9)

给定音圈作动器在两模块质心坐标系下的安装位置矢量,可通过式(4)和式(5)求得雅克比矩阵。将式(3)、式(6)、式(7)、式(8)和式(9)代入式(1)和式(2)可得到分离式卫星两模块的动力学模型。
3 分离式科学卫星仿真研究
3.1 仿真参数
考虑分离式卫星服务模块的质量为3 000 kg,载荷模块的质量为400 kg,两模块的转动惯量分别为:
根据图1所示,音圈作动器在两模块本体坐标系下的安装位置坐标如表1所示。
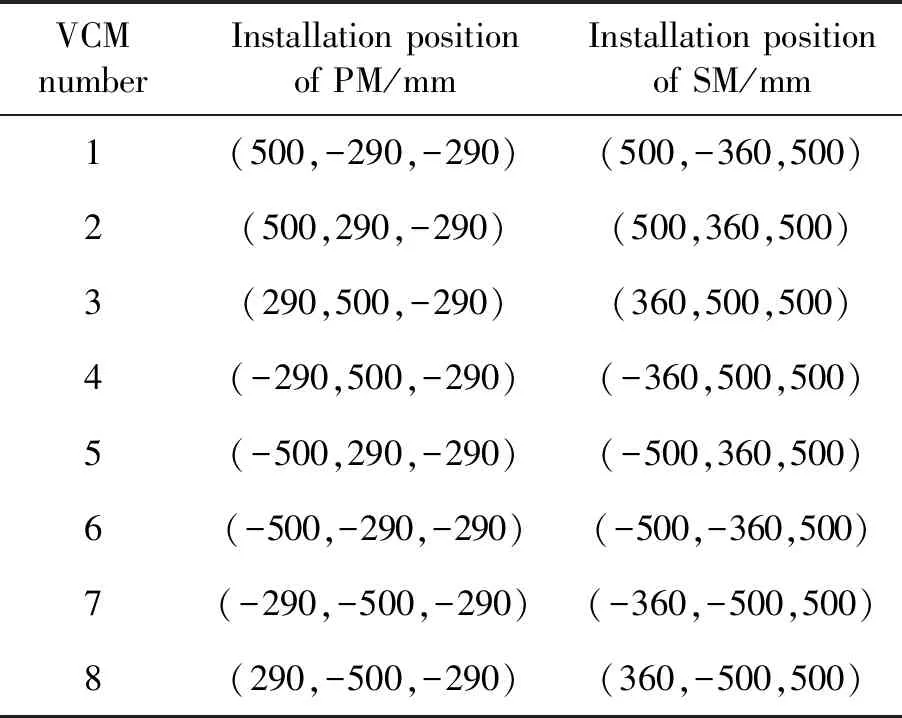
表1 音圈作动器安装位置坐标
根据表1计算得到音圈作动器的安装雅克比矩阵为:
从控制力分配雅克比矩阵中可看出,载荷模块的每个运动自由度至少可通过四个音圈作动器进行控制,表明音圈作动器安装构型可提供一定的容错性能。柔性线缆会对载荷模块施加六自由度扰动力/力矩,假设柔性线缆的等效弹性系数矩阵为:
为了避免弹簧传递的扰动影响载荷模块的隔振性能,限位弹簧的弹性系数设计为986 N/m,对应载荷模块的z向振动基频为0.5 Hz,限位弹簧在x和y方向上的弹性系数考虑为z向弹性系数的20%。
3.2 载荷模块隔振控制器设计
隔振控制器通过加速度传感器测量载荷模块加速度,控制音圈作动器补偿服务模块的扰动,加速度反馈模式下两模块的控制系统方块如图2所示。

图2 两模块控制系统方块图Fig.2 Control block diagram of two modules
服务模块的扰动通过柔性线缆和限位弹簧传递到载荷模块,通过测量载荷模块加速度,隔振控制器控制音圈作动器补偿服务模块的扰动。音圈作动器对载荷模块施加控制力的同时,也会对服务模块产生扰动力。
隔振控制器考虑为比例积分控制器,加速度反馈下增加隔振控制器的比例系数等效为提高载荷模块的质量,而增加积分系数则等效为提高载荷模块的阻尼。比例系数和积分系数需要根据主动隔振带宽来设计。以z方向为例,被动隔振下载荷模块z方向基频为0.5 Hz,通过主动隔振将振动基频降低至0.05 Hz,因此z方向隔振控制器比例系数满足:
式中:Pz是z方向隔振控制器比例系数;Kz是z方向对应的弹性系数;mp是载荷模块的质量。
为了避免高频加速度测量噪音和载荷模块高频动力学影响隔振控制器的稳定性,加速度测量信号需要进行低通滤波,低通滤波器形式为:
式中:ωn为滤波器穿越0 dB线的频率;ξ为阻尼比。
设计滤波器穿越0 dB线的频率为10 Hz,则从服务模块线加速度扰动输入到载荷模块线加速度输出的开闭环扰动传递曲线如图3~图5所示。
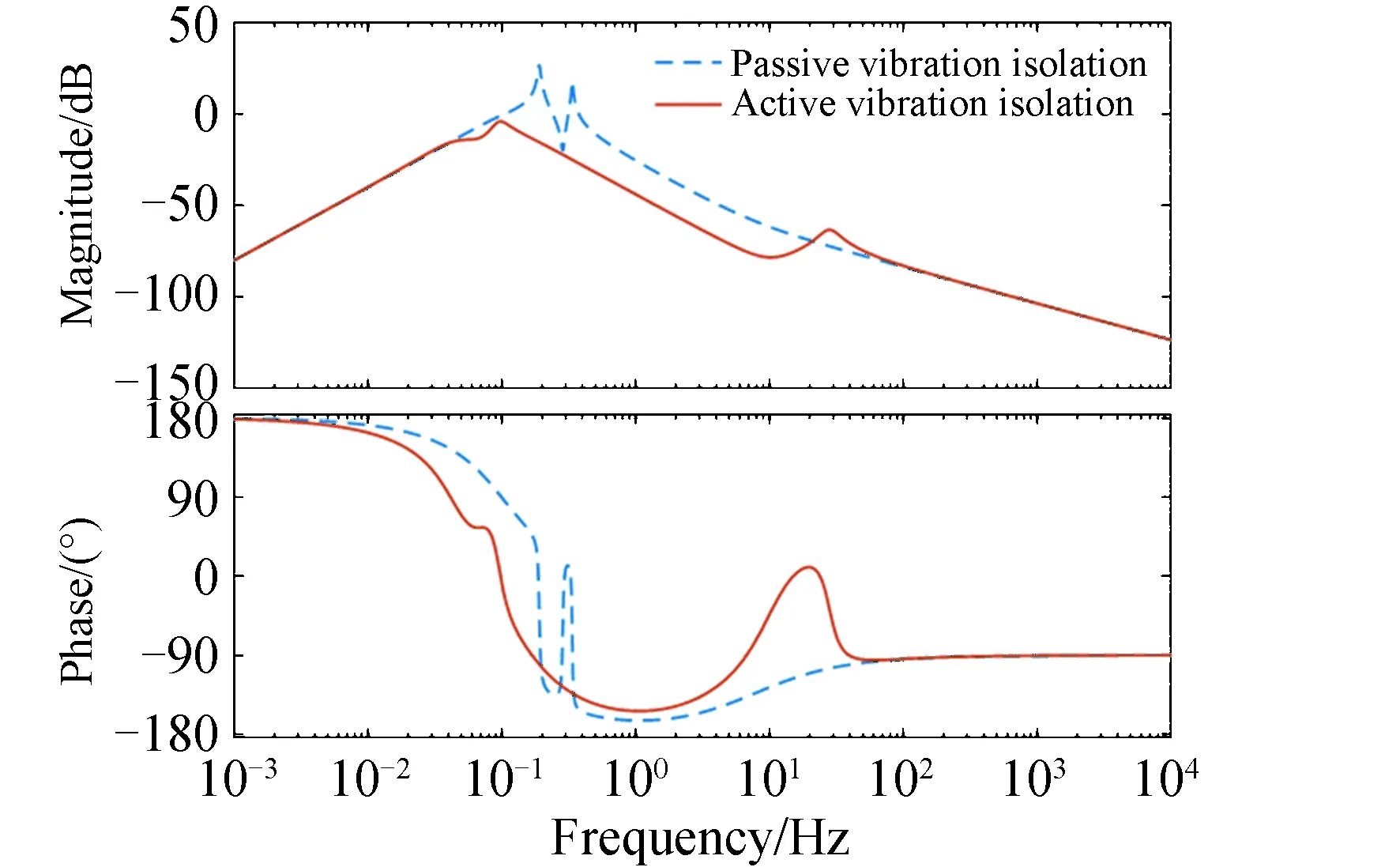
图3 x方向扰动传递曲线Fig.3 x-direction disturbance transfer curve

图4 y方向扰动传递曲线Fig.4 y-direction disturbance transfer curve

图5 z方向扰动传递曲线Fig.5 z-direction disturbance transfer curve
从开闭环扰动传递曲线中可看出,z方向开环扰动传递基频在0.5 Hz,x方向和y方向因耦合存在两个谐振基频。x方向和y方向上具有主动隔振性能的频率范围约为0.03~20 Hz,z方向上具有主动隔振性能的频率范围约为0.1~30 Hz。100 Hz后载荷模块通过被动隔振隔离服务模块扰动,在100 Hz时对服务模块的扰动隔离能力超过-75 dB。
3.3 载荷模块主被动振动隔离仿真
仿真中,假设音圈作动器最大输出力为20 N,力系数为2 N/A。隔振控制器计算得到的控制电压通过一个16位,输出范围为±10 V的DAC芯片输出给音圈驱动器,考虑DAC芯片输出给音圈驱动器的控制电压波形中混杂有幅值为±1 mV的随机白噪音。此外,考虑音圈作动器驱动器输出驱动电流给线圈时,线缆传输电流信号过程中引入幅值为±0.1 mA的白噪音干扰。仿真得到主被动隔振下载荷模块三轴线加速度的时域响应和对应的功率谱密度对比如图6~图8所示。
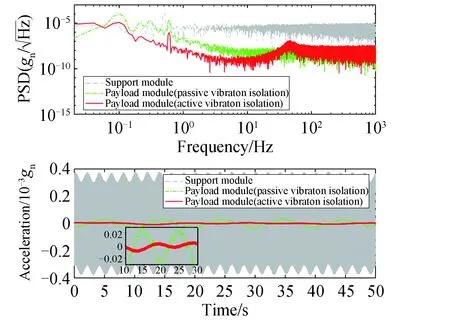
图7 时域和频域主被动隔振对比(y方向)Fig.7 Comparison of active and passive vibration isolation in time and frequency domain(y-direction)

图8 时域和频域主被动隔振对比(z方向)Fig.8 Comparison of active and passive vibration isolation in time and frequency domain(z-direction)
从仿真结果中可看出,服务模块三轴加速度扰动输入峰峰值在±0.4 mgn以内,两模块加速度时域信号均方根和功率谱密度在0.5~200 Hz频率范围内的积分值如表2所示。

表2 载荷模块主动隔振性能
表2中可看出,经过主动隔振后,载荷模块三个线自由度时域加速度的均方根均小于5×10-6gn,对服务模块的振动隔离超过95%以上,加速度功率谱密度累积积分最大值为1.231×10-6gn。
超静科学卫星先进载荷以加速度功率谱密度在某一频率范围内的积分对微振动环境提出指标要求。因此主动隔振控制器的设计需要综合考虑载荷主动隔振频带的需求和软硬件对隔振控制器带宽的限制。主动隔振频带下界主要通过调整控制器参数实现,并通过加速度滤波等手段满足软硬件对控制器带宽的限制。
在滤波器穿越频率为10 Hz时,改变隔振控制器比例增益,主动隔振后载荷模块x方向加速度功率谱密度在0.5~200 Hz频率范围内积分曲线如图9所示。

图9 x方向加速度功率谱密度累积积分曲线Fig.9 PSD cumulative curve of acceleration in x-direction
当比例增益Pz取1 625、2 764和7 701时(主动隔振控制器的带宽分别是750 Hz、950 Hz和1 400 Hz),图9可看出载荷模块加速度功率谱密度积分曲线的初始值分别为6.0×10-7gn、4.0 ×10-7gn、1.6×10-7gn,表明提高加速度反馈增益可降低0.5~200 Hz频率范围内加速度积分初值,从而降低累积积分值。但加速度比例增益越高,加速度累积积分曲线在高频处斜率越大,表明高带宽控制对高频噪音较为敏感,最坏情况下可能导致控制器失稳。
为了避免高频噪音对主动隔振控制器稳定性的影响,可通过降低低通滤波器的穿越频率以降低隔振控制器带宽。在隔振控制器比例增益为7 701时,改变加速度滤波器的穿越频率,主动隔振后载荷模块x方向加速度功率谱密度在0.5~200 Hz频率范围内,积分曲线如图10所示。

图10 x方向加速度功率谱密度累积积分曲线Fig.10 PSD cumulative curve of acceleration in x-direction
当加速度滤波器的穿越频率分别为15 Hz、10 Hz和5 Hz(主动隔振控制器对应的带宽分别是1 800 Hz、1 400 Hz和790 Hz),图10可看出不同滤波器下加速度累积积分曲线初值相同。但降低滤波器穿越频率同时会降低主动隔振的性能区间,可能会导致加速度累积积分值不能满足指标要求。
因此设计分离式主动隔振控制器时,需要综合加速度累积积分指标要求、音圈电机带宽、加速度传感器测量能力等约束条件,折中优化隔振控制器的参数和闭环带宽,以满足超静超稳载荷对加速度功率谱密度累积积分值的特殊指标要求。
4 结论
本文研究了一种面向超静科学卫星的分离式主动隔振技术,通过牛顿欧拉法建立了分离式隔振平台的动力学模型,并设计了六自由度主动隔振控制器。相比于被动隔振,主动隔振的性能区间主要体现在0.1~20 Hz频率范围内。仿真结果表明,载荷模块对服务模块的振动隔离性能超过95%,加速度功率谱密度在0.5~200 Hz频率范围内积分最大值为1.231×10-6gn。主动隔振控制器需要综合加速度频谱积分的指标要求和传感器高频噪音对控制器稳定性的影响,折中优化隔振控制器的参数和闭环带宽。