海-冰-气无人冰站极地工作环境下的结构特性研究
2021-09-02袁卓立乐晓凌陈家旺左广宇杨望笑
袁卓立,乐晓凌,陈家旺,左广宇,杨望笑
(1.中国极地研究中心,上海 200136;2.浙江大学,杭州 310058;3.太原理工大学,太原 030024)
0 引 言
近年来,北极海冰加速融化,气候预测结果表明,到2040~2050 年北极夏季的海冰有可能完全消失,这将促进“北极航道”的进一步开通[1-2]。北极航道包括西北航道、东北航道和中央航道,航道一旦开通,东亚与西欧之间的海上距离可缩短5 000~9 000 海里,而且能够摆脱苏伊士运河、马六甲海峡、巴拿马运河的通航吨位限制[3-4]。目前北极航道中的东北航道已经开始进入季节性商业利用的新阶段,2013 年8 月我国中远“永盛”轮从大连港出发并经东北航道顺利到达荷兰鹿特丹港。西北航道的商业试航在2012 年也已经开始,中国第八次北极科学考察已经实现了中央航道的穿越[5]。海冰依然是目前北极航道利用的最不确定因素,北极航道沿线海冰的密集度、厚度等物理指标是北极航道是否具备适用性的最重要参考依据[6]。然而,无论是北极航道的开拓与利用,还是投资和工程承包等其他经济活动,都面临同样的决策难题:缺少北极航道水域长期的、连续的观测资料;存在大量的基础信息盲区,从而缺乏北极海冰、水文、气候等环境条件变化趋势可靠的判断依据;参与北极开发和航道利用的决策存在较大的不确定性风险。
北极海洋、海冰、气候的基础环境数据观测,以往大量依靠破冰船船基考察,但船基考察具有季节性的特点,考察主要集中在夏季非常有限的时间周期,导致对春季海冰融化以及秋季冻结等关键过程缺乏了解,而这些过程对于了解海冰过程极为关键。通过布放在海冰上的冰浮标对环境数据进行长期连续采集是解决这一问题的有效手段。国际北极浮标计划(IABP)于1991年正式成立,在北冰洋布放了大量冰浮标,成立了冰浮标观测网络。近几十年来观测网络发现大量的北极环境剧烈变化现象,如气压下降气温上升、波弗特涡旋减弱等,所获得的观测数据为北极海冰预报提供了重要检验和预测依据[7-8]。但是目前美国、加拿大、德国等国围绕IABP 研发的冰浮标主要关注表层气压、海冰温度、海冰运动等,虽然技术成熟,但单系统观测的参数不多,目前尚未成熟地研发出一套观测系统可以涵盖上层海洋、海冰、表层大气三界面的多参数协同观测[9]。我国在极区冰浮标技术开发上起步较晚,2003年国家海洋技术中心成功研发了一套极区海洋环境自动监测浮标,但此浮标旨在对气象和海洋环境数据进行观测,无法实现海冰观测[10-11]。我国北极科学考察开始于1999年,至今已开展了11次北冰洋海洋学考察,但受到了北极恶劣的气候环境影响,以及我国后勤支撑能力的限制,我们目前的北极考察都只局限于夏季,严重缺乏对北极冬季的海-冰-气相互作用过程的认知,从而制约了海冰预测预报能力的提高。
因此,本文提出了一套可实现大气边界层-海冰-冰下海水基础环境参数自动获取的海-冰-气无人冰站系统,并对其进行了稳定性和结构强度仿真研究,观测系统将来通过组网式布放构成阵列式观测体系,预期可为北极海冰快速变化机制和北极航道适航性研究提供长期连续且稳定可靠的基础环境数据支撑。
1 无人冰站系统与结构设计
新型海-冰-气三界面无人冰站观测系统设计布放于北极的海冰上,布放后随着海冰在北冰洋一起漂流,通过系统传感器自动观测海冰下方上层海洋、海冰以及海冰上层底层大气的相关科学参数,通过铱星模块将这些参数传输回国内总部,全程无人值守。
海-冰-气无人冰站的观测系统由三个观测子系统组成,分别为大气观测子系统、海冰观测子系统和上层海洋观测子系统,如图1 所示。大气观测子系统配备了2 m 层位的温度传感器、湿度传感器和大气压力传感器;海冰观测子系统配备了积雪深度传感器、海冰厚度传感器、海冰温度链传感器和海冰光辐射传感器;上层海洋观测子系统配备了5 个层位温盐传感器、1 个层位温盐深传感器、2 个层位的叶绿素传感器和2个层位的溶解氧传感器。
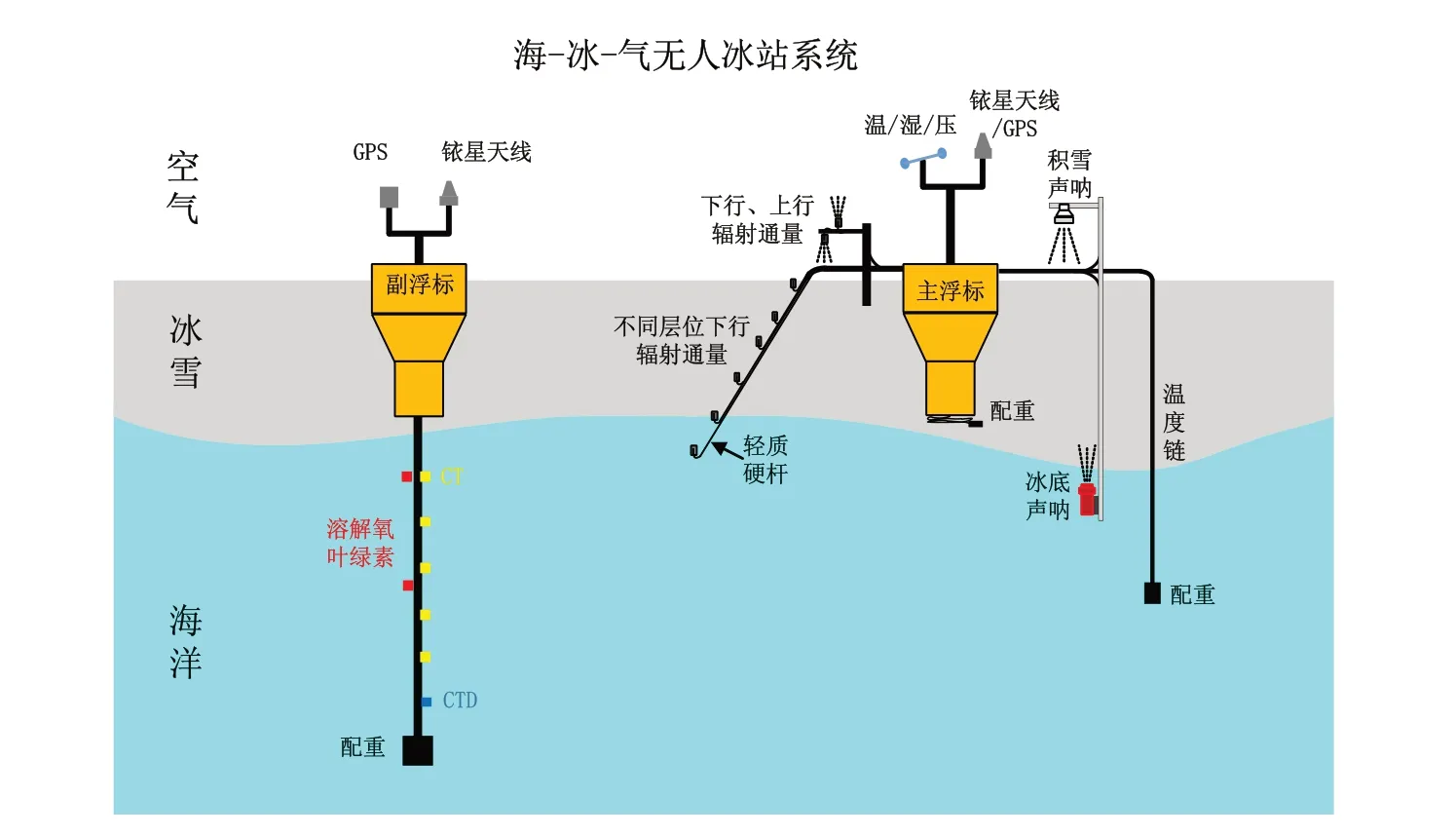
图1 海-冰-气无人冰站系统图Fig.1 Schematic of ocean-ice-atmosphere observation system of unmanned ice station (UNIS)
三个观测子系统被搭载在无人冰站主浮标和副浮标两个结构本体上,主浮标搭载大气观测子系统和海冰观测子系统,副浮标搭载上层海洋观测子系统,系统结构示意图如图2 所示。主副浮标的主体构件为全密封的铝合金电子舱,电子舱内搭载了电池组、控制器和通讯模块,内部电子器件与外部传感器通过水密接插件连接,保证在北极冻雨潮湿环境下主控制器的干燥和可靠性。极区冰表环境温度和冰内温度具有巨大差异[12],北极冬季差异量可以达到10 ℃以上,冰内温度要大大高于冰表裸露的环境温度,因此将电池组、控制器和通讯模块全部设计安放在电子舱冰表面高度以下的舱体区域,避免环境温度过低损耗电池组供电效能和供电能力,也避免低温对系统控制电路可靠性造成影响。主副浮标的电子舱上端安装有气象/通讯支架,支架为八爪鱼结构,支架上的气象传感器、GPS 传感器和铱星天线通过空心支架内部管线与无人冰站标体主体控制舱连接,此封闭式设计可有效避免传感器和天线线路暴露在外面,避免其受到北极熊、冻雨等物理破坏。
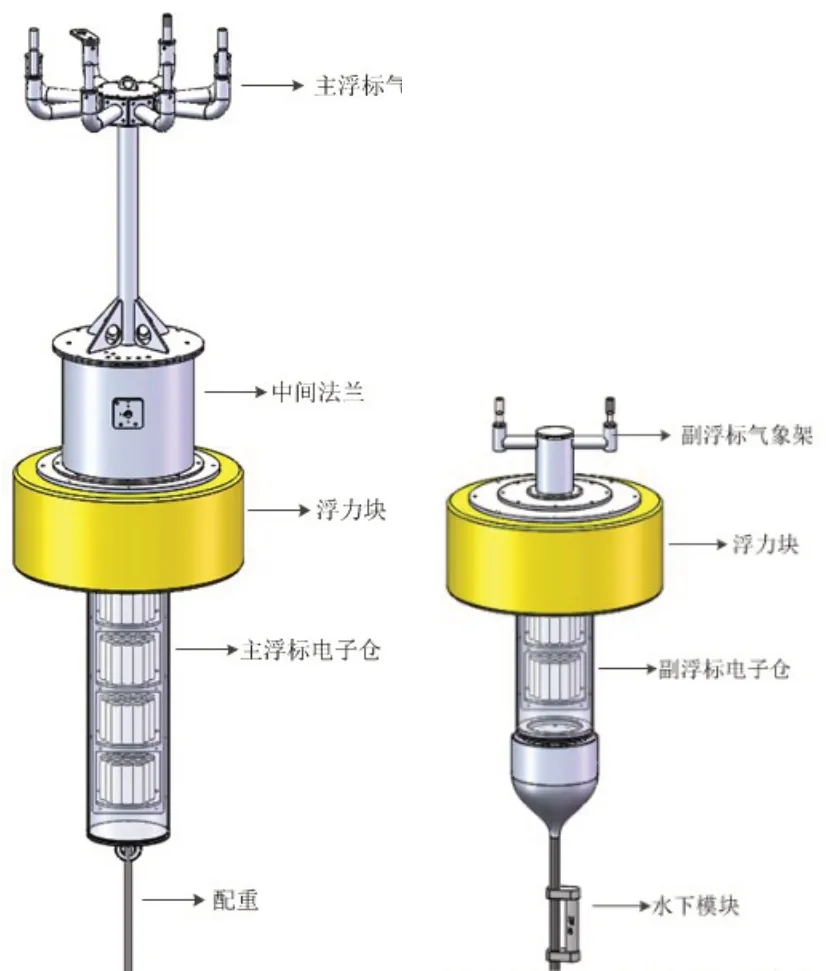
图2 海-冰-气无人冰站主浮标(左)和副浮标(右)结构示意图Fig.2 Structure diagram of UNIS main buoy(left)and sub buoy(right)
主副浮标的电子舱和气象支架均采用6061-T6 航空用铝合金材料,并进行镀锌阴极保护处理。6061-T6铝合金材料具有强度高、质量轻,耐腐蚀等优点(见表1),并能有效适用于-40 ℃的工作环境,结构可靠性有高保障,同时轻便的重量也符合北极野外海冰冰面作业的客观恶劣环境,提高安装作业方便程度[13]。主副浮标同时都安装了一体式浮力材料,浮力材料选用交联聚合物材料并外涂环保聚脲,具有良好的浮力表现[14]。浮力材料能使冰浮标应对冰面可能出现的融池现象,保证融池环境下整体的观测能力,同时配合重块能有效使无人冰站系统在冰完全融化后的海洋工况下,在北冰洋中继续以普通海洋浮标的形式继续存活,并继续进行观测作业。
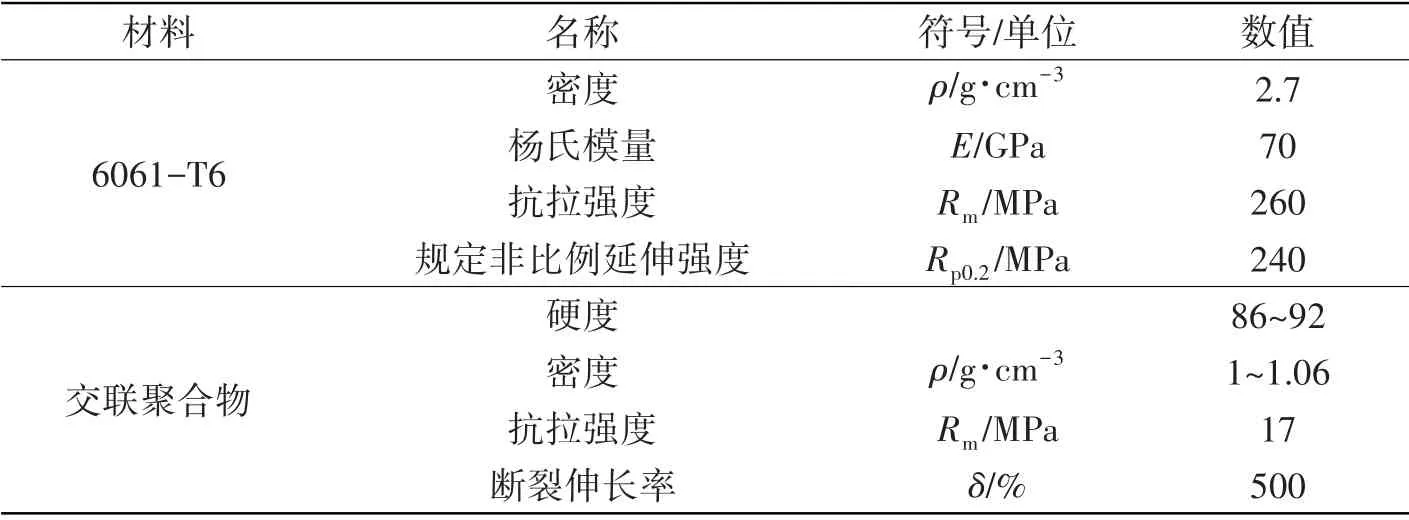
表1 6061-T6铝合金和交联聚合物材料特性表Tab.1 Material properties of Aluminum 6061-T6 and cross-linked polymer
2 无人冰站稳性计算
根据工况需求,当B 型冰站布放的北极浮冰融化时,冰站需要能对自身提供足够的浮力,使得B型无人冰站能在冰化后作为普通海洋浮标继续工作,因此需要计算B 型无人冰站的重心和浮心位置。为便于计算,以无人冰站主副浮标标体电子舱底部圆心为原点,建立坐标系,其中O-Y轴垂直向上,O-X轴与静水面平行,如图3所示。
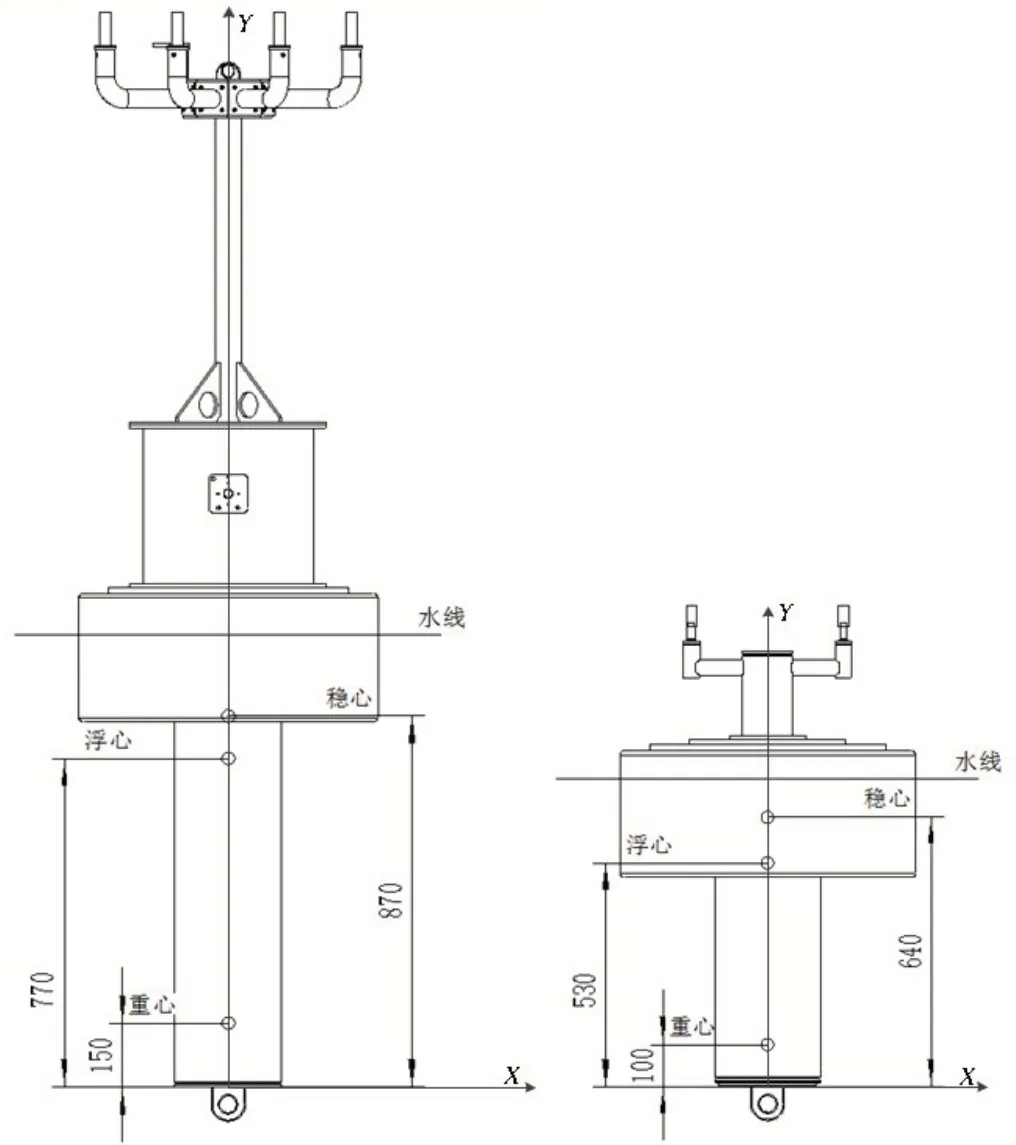
图3 无人冰站主浮标(左)和副浮标(右)的稳性示意图Fig.3 Stability diagram of main buoy(left)and sub buoy(right)of UNIS
通过对无人冰站主浮标和副浮标的零部件进行重量计算,得出主浮标的总重约为118 kg,副浮标的总重为129 kg。通过计算得到主浮标的重心位置在0.15 m 处,设计浮力材料即聚脲浮力块安装在0.87 m 处。浮力块可提供100 kg 的浮力,下筒体也能提供60 kg 的浮力,超出所需浮力42 kg,可以为主浮标提供浮力保障。副浮标重心位置在0.10 m 处,设计浮力材料即聚脲浮力块安装在0.5 m 处。浮力块可提供100 kg 的浮力,下筒体也能提供42 kg 的浮力,超出所需浮力30 kg,可以为副浮标提供浮力保障。
浮体在外力作用下偏离其平衡位置会倾斜,当外力消失后,具有自行恢复到原来平衡位置的能力为浮体的稳性。初稳性是指浮体在角度小于10°~15°横摇范围内的稳性问题,是衡量浮体稳性的重要指标,一般而言,初稳性高是衡量浮标初稳性的主要指标,即
3 无人冰站结构特性计算与仿真
3.1 静冰环境工况下的无人冰站抗风能力计算与仿真
低温和大风是极区环境的主要挑战,无人冰站在正常静冰环境工况下,处于无人值守状态,系统结构可靠性至关重要。因此,通过采用ABAQUS有限元仿真软件,计算分析了无人冰站标体结构在极区大风环境下的抗风能力。
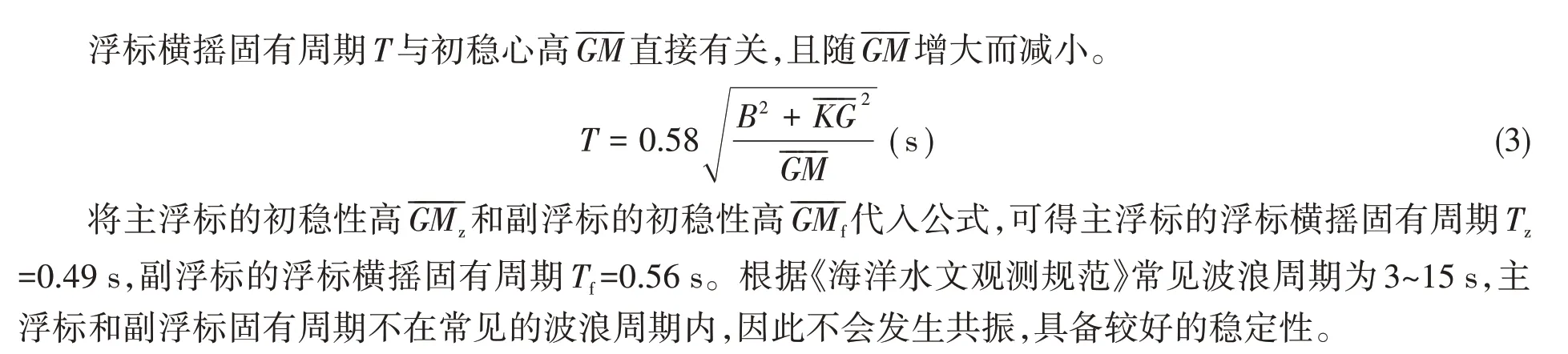
在常规静冰作业工况下,无人冰站冻在海冰上,抗风能力主要体现在标体顶部气象/通讯支架的结构强度上,系统主浮标气象通信支架结构较副浮标的要更大更复杂,因此采用主浮标的气象支架作为抗风能力的仿真对象,并对支架在ABAQUS 中进行了模型建模,如图4 所示。采用非结构网格并建立了网格模型,总网格数为167 630 个,经过计算相对误差为0.56%,证明此网格模型具备良好的网格无关性。
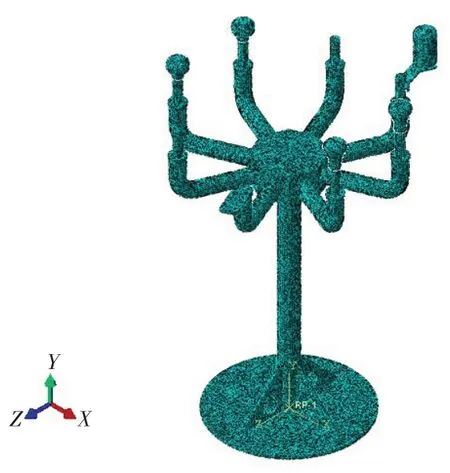
图4 无人冰站主浮标气象支架网格图Fig.4 Grid map of weather/communication tower of UNIS main buoy
计算风压p时,以根据一定的标准高度和形状选定的基本风压值p0为基础,然后对风压沿高度的变化和受风构件形状做修正。基本风压p0可由下式确定:

式中,g为重力加速度,取g=9.8 m/s2;γ为空气重量密度,取γ=12.01 N/m3;v为设计风速,单位m/s。于是上式可写成

在北极极端气候下,风速最高可以达到12级,12级的风速区间为32.7~36.9 m/s,取12级风速最大值36.9 m/s代入公式,可得基本风压为794.45 N/m2。在ABAQUS中,沿x轴正方向施加基本风压载荷,如图5所示。经过ABAQUS有限元仿真,获得气象支架应力云图,如图6所示。
图5 无人冰站主浮标气象支架基本风压载荷示意图Fig.5 Basic wind pressure load to UNIS in ABAQUS
通过应力云图可以得知,无人冰站主浮标气象/通讯支架受风压影响后主要受力集中在气象支架主支架上,最大应力在主支架和主支架支撑架相连接的上端部,根据ABAQUS 有限元仿真计算,在风速36.9 m/s,基本风压794.45 N/m2的条件下,无人冰站气象支架的最大应力Rmax= 121.74 MPa,Mises 最大应力数值小于6061-T6 铝合金的管材抗拉强度Rm= 260 MPa,小于规定非比例延伸强度Rp0.2= 240 MPa,证明了无人冰站主浮标主体结构能承受12 级风力的环境情况,具备相当的结构强度可靠性。
在同样的网格模型和边界条件设定下,计算了1~11 级风速的基本风压,通过ABAQUS 有限元仿真计算了各级风速下的无人冰站气象支架的Mises 最大应力值,获得无人冰站的Mises最大应力曲线,如图7所示。
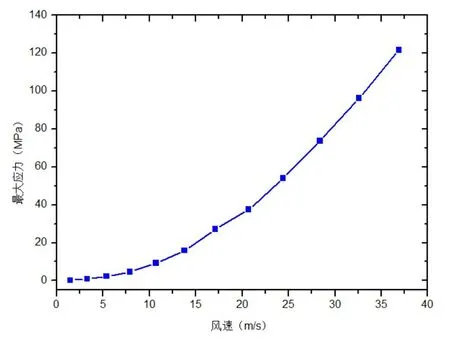
图7 无人冰站结构最大应力与风速的对应关系Fig.7 Maximum stress under boundary conditions of different wind speeds
3.2 开阔海域工况下的无人冰站抗风能力计算与仿真
当无人冰站所布放的浮冰融化后,无人冰站将作为普通海洋浮标在北冰洋开阔水域进行工作,需具备一定的抵抗风力倾覆能力。系统主浮标露出海面的结构部分较副浮标更高更大,因此选择无人冰站主浮标作为分析对象,研究现有设计下主标体在开阔水域的抗风能力。当无人冰站在开阔海域工况作业条件下,经过计算其浮力材料块露出水面97 mm,在ABAQUS 中对无人冰站进行了模型建模,采用了非结构网格并建立了网格模型,总网格数为242 931个,经过计算相对误差为0.08%,证明此网格模型具备良好的网格无关性。
以7 级风速为仿真风速条件,风速13.9 m/s 条件下,基本风压载荷为103.6 N/m2,在ABAQUS 中,沿x轴正方向施加基本风压载荷,施加方式为线性施压,1 s时间风载荷从0 N/m2达到103.6 N/m2,通过ABAQUS有限元仿真得出此时无人冰站主浮标的风载荷力矩M1=196.12 N·m,力矩图和应力图如图9所示。
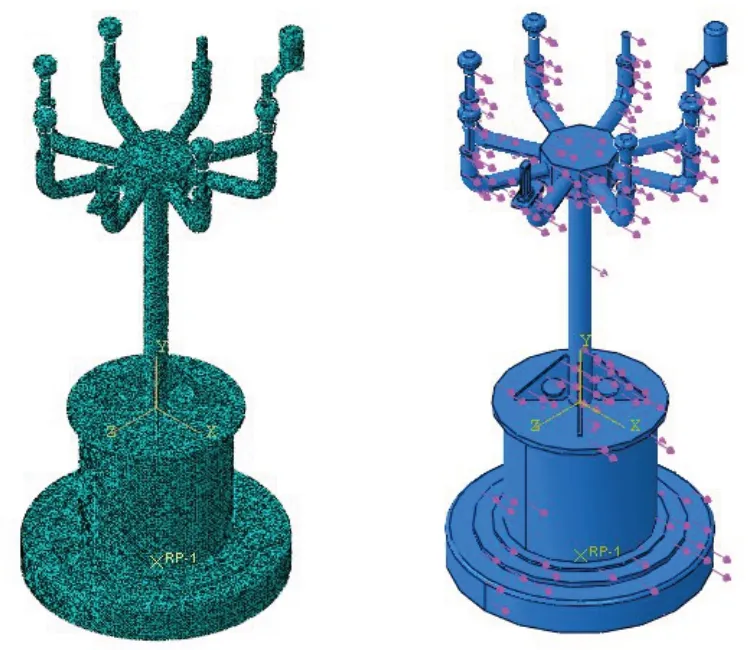
图8 无人冰站主浮标开阔水域水面结构网格图(左)和风压载荷示意图(右)Fig.8 Grid map of UNIS structure above ocean surface(left)and wind pressure load diagram(right)
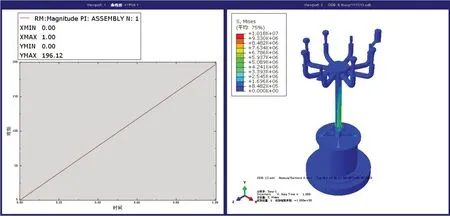
图9 无人冰站力矩图(左)和应力图(右)Fig.9 Torque diagram(left)and stress diagram(right)of UNIS
浮体在外力作用下的横倾力矩公式为

从表2中我们可以看出,浮标在倾角为15°时的复原力矩M0= 216.93 N·m,M1<M0,风力为7级时的风载荷力矩小于主标体倾角15°时的复原力矩,因此可以验证主标体在不大于15°的情况下,能抵抗水面上7级风力的载荷,并再恢复正浮状态。

表2 浮标复原力矩Tab.2 UNIS restoring moment
4 无人冰站系统的极区现场应用
在海-冰-气无人冰站系统的结构特性研究的基础上,研发并集成了无人冰站样机三套:第一套无人冰站样机通过中国第九次北极科学考察航次,在2018年8月18日于北纬84.096 86°,西经167.133 94°的北冰洋中央区浮冰冰面成功布放,系统在北极无人值守的海冰上连续生存了25 个月;第二套无人冰站样机通过MOSAiC 国际合作航次于2019 年10 月10 日在北纬85.182°,东经134.533°的北冰洋中央区浮冰冰面成功布放,系统连续生存了10个月;第三套无人冰站样机通过中国第十一次北极科学考察航次,在2020 年8 月19 日于北纬86.026 03°,西经160.512 319°的北冰洋中央区浮冰冰面成功布放,系统正常生存至今。三套样机的北极现场布放照片如图10~11 所示,三套样机的GPS 轨迹漂移图如图12 所示,图中标识了九北和MOSAiC 航次布放的两套无人冰站工作期间的全部漂移轨迹,十一北布放的无人冰站漂移轨迹截止到2020年10月20日。

图10 九北布放的无人冰站样机(左)和MOSAiC航次中布放的无人冰站样机(右)Fig.10 UNIS prototypes in CHINARE 9th(left)and MOSAiC(right)

图11 十一北布放的无人冰站主浮标照片(左)和2020年8月31日无人摄像头拍摄到的无人冰站工作照片(右)Fig.11 UNIS prototypes in CHINARE 10th(left)and photo of UNIS buoy taken by camera on August 31,2020(right)
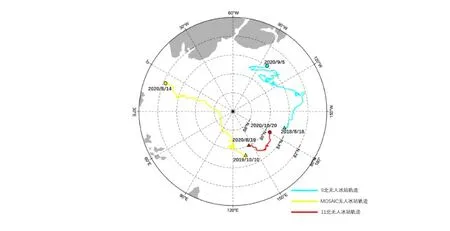
图12 九北、MOSAiC和十一北航次布放的无人冰站漂移轨迹图Fig.12 Drift track of UNIS deployed in CHINARE 9th,MOSAiC,and CHINARE 11th
三套样机圆满完成了各自航次既定的海-冰-气三界面无人值守观测任务,获得了大量的观测数据。图13中的三张图分别展示了九北、MOSAiC 和十一北航次布放的无人冰站冰面气温观测数据。从图中可以看到,九北航次布放的无人冰站所观测到最低大气温度为-37.8 ℃(2019 年2 月14 日),MOSAiC 观测到的最低气温为-39.8 ℃(2019年3月24日),十一北观测到的最低气温为-28.1 ℃(2020年10月27日),三个航次大部分时间的冰表面温度都在-35 ℃~0 ℃的区间内,气温和环境条件较为恶劣,但无人冰站的观测能力和生存能力从侧面证明了海-冰-气无人冰站系统在极区环境下具备适用性和可靠性。
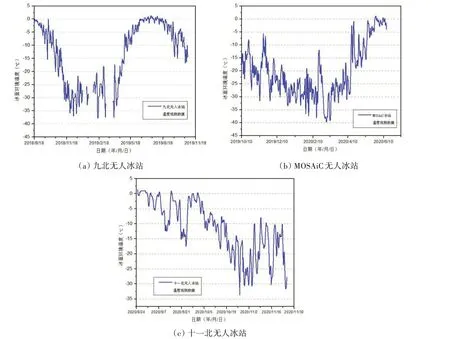
图13 观测到的冰表面气温数据图Fig.13 Ice surface temperature data observed
5 结 语
经过连续三年三个航次的现场布放和应用,证明了海-冰-气无人冰站系统具备了极区海洋、海冰、大气三个层位无人值守连续观测能力,并在北极恶劣环境下具备适用性和可靠性。未来预期对无人冰站系统结构和电气进行一体化、模块化、标准优化设计,通过模块设计和快速连接技术等优化工作,提高平台部件的通用能力、集成能力,提高极区有限的现场支撑条件下观测参数灵活调整及备品备件冗余性能力,从而提高现场的安装效率。同时在研发中加强传感器等部件的国产化适配推进,降低无人冰站系统的制作成本,推动海-冰-气无人冰站系统的定型与量产,预期可为北冰洋观测网络提供高可靠性和适用性的观测设备支持。
