双速电机控制电路中热继电器冒烟故障分析与排查*
2021-09-02杨正勇简立明
刘 欢,杨正勇,简立明
(湖南财经工业职业技术学院,湖南 衡阳 421002)
0 引言
课题组所在单位的电工实训中心购买了几台型号为YD90S-4/2型双速电机(380 V、△/YY接法、1430/2850 rpm、0.85 kW/1.1 kW、2.3 A/2.8 A、50 Hz),第一次使用就出现了异常情况,每台电动机能正常低速启动运行,但进行低速/高速切换时,对电动机进行高速过载保护的热继电器冒烟烧毁。虽然多次进行各种试验,甚至将热继电器的整定值调至30 A,热继电器仍然冒烟烧毁,无疑问题出在电动机上。
为了锻炼学生分析问题、解决问题的能力,培养学生勇于创新、精益求精的工匠精神,课题组指导电气控制协会的同学设计制作双速电机控制电路,控制对象就采用这种“问题”双速电动机,指导学生用数字万用表测量各相绕组引出端的直流电阻,通过比对分析,标示出电动机定子绕组出线端,并按该标示接线,该批次双速电动机成功进行低速/高速切换。
1 变极调速原理
在工业生产中为了获得较高的生产率和保证产品加工质量,常要求生产机械能在不同的转速下进行工作,若采用电气调速,可大大简化机械变速机构[1]。异步电动机转速公式如下:

由异步电动机转速公式可知,调节异步电动机的转速有3种方法:改变转差率s、改变电源频率f、改变磁极对数p。在电源频率恒定的条件下,改变磁极对数p就可改变同步转速n0和相应的转子转速n。
变极调速只适用于笼型异步电动机[2],因为笼型异步电动机转子绕组的极对数是电磁感应产生的,随定子磁场极对数改变而改变,这样形成有效平均电磁转矩,达到变极调速的目的。
单绕组双速电动机的变极方法有反向法、换相法和变跨距法等,其中以反向法应用最为普遍。反向法是通过改变电动机定子绕组的连接方式,使部分绕组的电流方向反向。下面以2/4极线圈为例说明反向变极的原理。
如图1所示,当电流通过线圈的某瞬间,每个线圈边产生的磁场,其方向根据右手螺旋定则确定。图中符号“×”表示电流流入纸面,符号“.”表示电流从纸面流出,这样就形成S、N两个磁极。

图1 2P=2极的接线
若将一半线圈电流反向,如图2所示,即改变绕组的接法,则这时的磁场变形成4个磁极,磁极数增加了1倍,这种变极法被称为倍极比反向法。
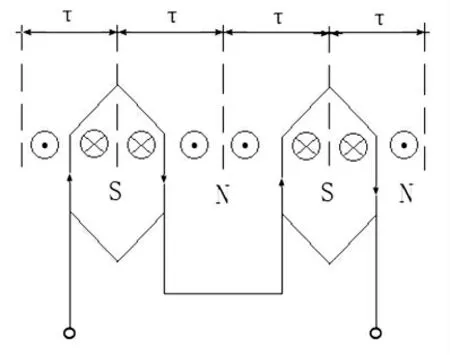
图2 2P=4极的接线
单绕组变极可以使定子绕组磁动势极对数成倍数关系改变,从而获得倍极比(如2/4极、4/8极)的双速电机。也可获得非倍极比(如4/6极、6/8极)的双速电机。
2 双速电动机高低速的旋转方向
以定子24槽、2/4极单绕组双速电动机为例,采用反向法作出槽电势分布图并对其绕组进行排列,从而探索双速电动机低速与高速的旋转方向。
2.1 二极槽电势分布图
选2极为基准极,作出槽电势分布图,其作法步骤如下。
2.1.1 计算基本参数

2.1.2 编写槽号
编号的行数为磁极对数,即1极为1行,2极为2行。
2.1.3 确定槽的相属和每槽的电角度
取每极相槽数为一相带,每个相带按a、c、b次序循环排列,并将各槽相属标在槽号下,再根据计算参数标出相邻两槽的电角度。本例中,每极相槽数为4,所以取每一相带为4槽,按a、c、b次序循环排列,然后将α=15°标示在表格中相邻两槽之间。
2.1.4 确定A、B、C相轴和a、b、c副轴
在任意一个相带中取一对称位置,并定出某相的相轴,在距该相轴120°和240°电角度处定出另外两相的相轴,使三个相轴对称并互差120°电角度,并用同样的方法在距某相轴180°电角度处定出3个副轴。如在A相4槽(1a、2a、3a、4a)中,取对称中心位置定为A相轴,距120°、240°电角度处定为B、C相轴,再距相轴180°电角度处分别定出a、b、c副轴。
2.1.5 确定槽电势方向
各槽电势方向可依据下列原则决定,与相轴同相的槽,在相轴前后90°电角度以内为正,与副轴同相90°电角度以内为负[3]。由于1a、4a距A相轴22.5°,2a、3a距A相轴7.5°,均在A相轴90°电角度以内,因此方向为正。而13a、14a、15a、16a均在a副轴90°电角度以内,因此方向为负。作出的槽电势分布如图3所示。

图3 三相24槽2/4极单绕组双速电动机2极时绕组槽电势分布图
2.1.6 检查三相对称程度
把同相属的槽按相对位置归纳到相轴和副轴左右,然后将副轴平移180°电角度,使它与主相轴重合,并保留原来的负号。这样得出的各相槽电势分布应与相轴两边对称平衡。若不平衡,需重选相轴,直到对称为止。根据图3将同相属各槽归纳平移如图4所示,很显然三相对称平衡。

图4 三相24槽2/4极单绕组双速电动机2极时对称图
2.2 四极槽电势分布图
2.2.1 编写槽号
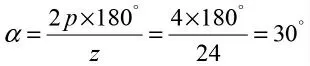
由于磁极对数为2,故作表2行;因为共24槽,每行为12槽,每槽所占的电角度为:
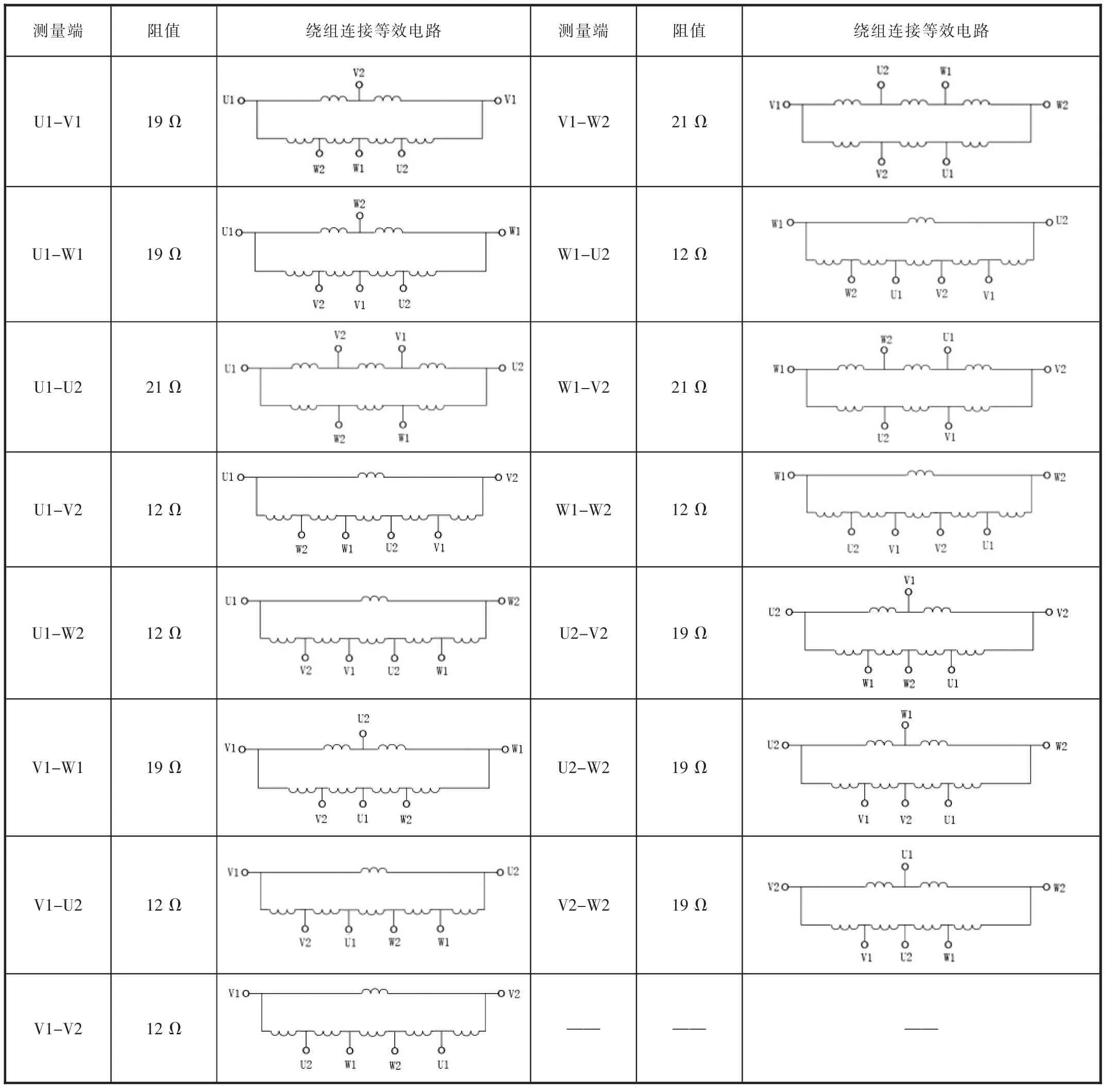
表2 2/4极单绕组双速电动机各引出端直流电阻及绕组连接等效电路
2.2.2 确定相属、相轴和各槽符号
根据2极时各槽相属不变并作为4极时各槽的相属,定出A、B、C相轴和a、b、c副轴,如图5所示。由于与相轴同相的各槽均在相轴前后90°电角度以内,所以全部槽的符号为“正”。由图5可看出三相显然对称平衡。
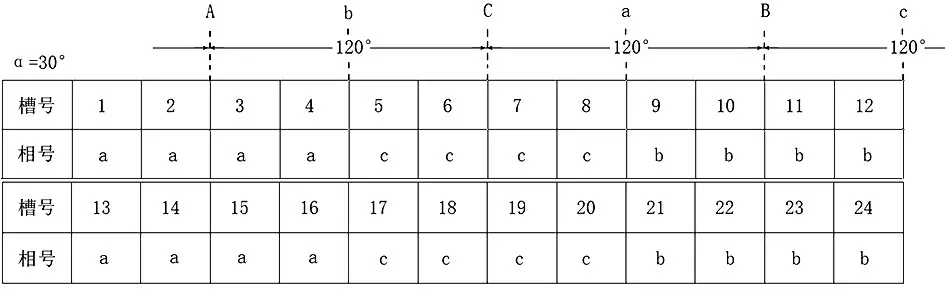
图5 三相24槽2/4极单绕组双速电动机4极时绕组槽电势分布图
2.3 绕组排列表
根据两种极数的槽电势分布图作出2/4极单绕组双速电动机绕组排列表,如表1所示。
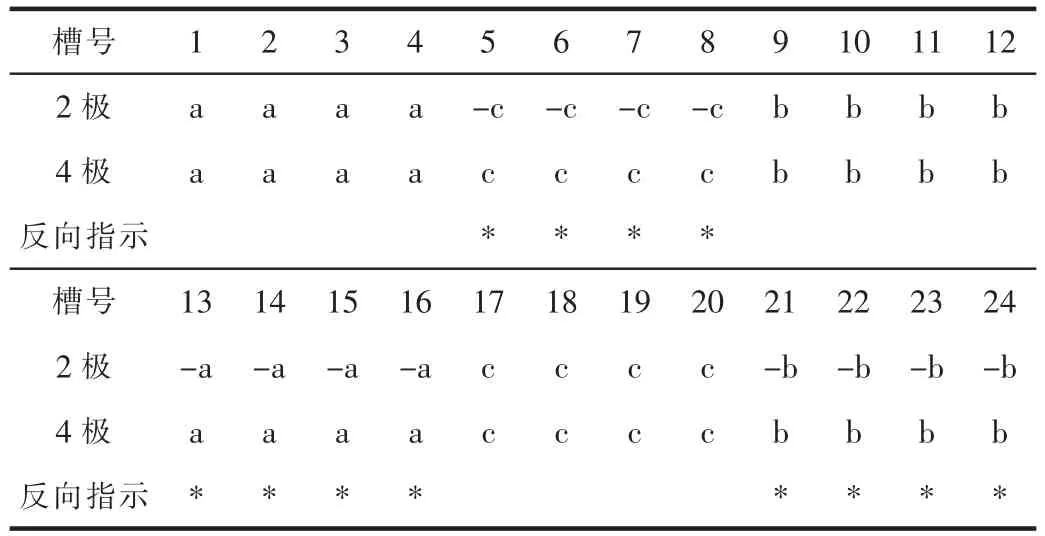
表1 三相24槽2/4极单绕组双速电动机绕组排列表
由表1可知,无论哪一相变极,都有一半线圈反向,表中以“*”进行标注。这与变极原理相吻合。
再比较图3与图5,2极时相轴的次序为A、B、C顺序,而4极时相轴的次序为A、C、B逆序。由此可见,双速电机高速、低速时旋转方向相反,要想使低、高速旋转方向保持一致,必须把电源相序反接[4]。
3 双速电动机高低速绕组判别
由于双速电动机三相绕组是对称的,所以无论△接法还是YY接法,各相引出线绕组的直流电阻呈对称性分布。为了避免拆卸电动机,采用数字万用表(不同万用表或不同电阻档位,测出的数值略有不同)对电动机各引出端进行了测量,测出的直流电阻如表2所示。
由表2可知,所测双速电动机绕组的直流电阻有3种读数,3种读数对应3种绕组连接类型。
通过对表2的比对分析,不难确定双速电机6个出线端高低速接法,如图6所示为双速电动机处于低速状态时的△接法,即电动机未通电时定子绕组状态。而电动机本身标注的引出端与之相比有出入,即“U2”与“V2”的位置进行了互换。
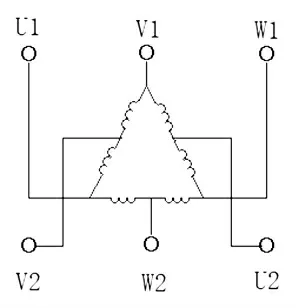
图6 双速电机未通电时定子绕组
4 热继电器烧毁的原因分析
通常双速电动机从低速切换至高速会产生冲击电流,电动机从正转切换至反转或从反转切换至正转,也会产生冲击电流。由于双速电动机绕组引出端标注出错,造成双速电动机低速启动与高速运行的旋转方向不一致,从而在很短的时间内连续两次产生冲击电流,造成热继电器冒烟烧毁。按正确的标注接线后,电动机进行低速/高速切换时,一切正常,不再发生热继电器冒烟的情况。
