利用反映帧间图像界定运动员跑步训练强度仿真
2021-08-31李三三
李三三
(铜陵职业技术学院 体育部,安徽 铜陵 244061)
运动员跑步训练强度,已经受到众多体育界人员的关注,而目前科技的高度发达,为运动员跑步训练强度仿真提供了基础[1].因此境内外都在积极研究运动员跑步训练强度仿真.在境外,可以将人体运动仿真技术分为3个阶段,第1阶段在20世纪70年代,所谓的仿真不过是通过柱面与人体组成简单的人体,采用关键帧对人体进行模拟,属于仿真技术的起步阶段[2].第2阶段在20世纪80年代,研发出数字化仿真技术,提出基于物理模型的人体运动仿真,在仿真过程中,达到人体虚拟运动的目标.第3阶段是九十年代至今,对人体运动仿真的研究,已经成为现代技术研究的热点之一,可以互动、运动、面部表情识别等,并在深度研究下,成功实现运动仿真[3].相较境外而言,我国对人体运动仿真技术研究较晚,但发展速度非常快,对仿真中的人体姿态识别、运动学等方面进行了深入的研究.在国外研究的成果下,引入数字图形图像技术,并展开了体育训练的三维人体运动仿真,为运动员训练提供了强大的技术保障[4].
文献[5]提出了基于运动图的路径编辑新方法,对人体运动进行了仿真,可以高度匹配真实人体的运动过程;文献[6]则提出了基于人体骨骼长度的实时约束逆向运动学算法,让仿真人实现骨关节运动,与真实人体运动效果相一致.但是上述研究中,所有仿真的人体运动过程,均处于单一的图像状态,不能形成连续的图像.
针对上述方法存在的问题,研究利用反映帧间图像界定运动员跑步训练强度仿真.通过模拟人体的关节旋转、转角、步长、速度配速等运动参数,得到准确地人体姿态模拟结果,构建运动员训练仿真模型,利用反映帧间图像实现对运动员连续跑步运动的模拟,并据此对运动员跑步训练强度进行分析.
1 基于反映帧间图像界定运动员跑步训练动画图像
1.1 获取运动员生理参数
针对运动员跑步训练强度仿真,需先获取运动员生理参数,根据生理参数,对运动员产生的运动过程进行计算仿真.而在此次运动员跑步训练强度仿真中,所要获取的运动员生理参数是运动员运动质心的位置、运动惯量及骨骼质量.因此采用统计学测量方法中的一元回归方程,表示运动员的身高与体段质量,体重与体段质量,体段长度与质心至近端距离各参数之间存在的线性关系,则有:
Y=λX,
(1)
式中,λ表示回归系数;X表示运动员的身高和体段长度;Y表示体段质量和体重.采用二元回归方程表示,质心到骨骼段远端的长度,体段的转动惯量分别与人体体重与身高之间存在的线性关系[7].因此设质心到骨骼段远端的长度和体段的转动惯量为Y,其回归系数为λ0,运动员体重为m,体重回归系数为λ1,身高为h,身高回归系数为λ2,则有:
Y=λ0+λ1m+λ2h,
(2)
式中的体重和身高,将通过仿真的跑步训练运动员实测得到.此时,即可针对测量和计算得到的数据,与仿真的虚拟人进行匹配,计算真实人体与仿真人体的匹配因子.此时,将两个相邻的标记点定义为一组匹配因子p,设两个相邻的标记点距离为e1,人体骨骼和肌肉对应的一组虚拟标记点的距离为m1,则有:
(3)
式中,人体骨骼和肌肉对应的一组虚拟标记点距离m1,可以通过人体模型测量得到;两个相邻的标记点距离e1,可以通过数据计算得到.此时,取所有相邻标记点比例的平均值s,则有:
(4)
式中,i表示匹配个数;Pi表示匹配因子;n表示所有两个相邻标记点构成的组数.此时,通过(4)式,即可得到真实人体与仿真人体的匹配因子,通过匹配因子,对真实人体进行虚拟仿真.此时根据人体仿真结果,控制仿真人关节运动,完成运动训练仿真.
1.2 校准运动姿态
基于上一节中,得到的仿真人与真实人体的匹配因子,成功得到的仿真人,校准仿真人运动姿态.由于仿真人运动控制本质上是动捕数据重定向过程[8].因此通过计算仿真人的关节转动、关节转动角度控制、仿真人运动角度控制和跑动过程分析,完成运动员跑步训练强度仿真,其仿真流程,如图1所示.

图1 运动员跑步训练强度仿真流程
从式(3)、(4)中可以看出,仿真人的关节运动也是通过两个节点进行相对转动的,而在这个转动的过程中,需要规定仿真人关节运动的先后顺序和运动角度,避免仿真人在模拟运动员跑步训练时,出现违背人体生理规律现象[9].因此将仿真人套进空间坐标系(x,y,z)中,设坐标系(x,y,z)中的任意一轴采用w表示,围绕w轴的旋转角度为θ,则单轴关节旋转矩阵为:
RoM(θ)=Rw(θ) ,
(5)
式中,R表示旋转矩阵;o表示坐标系(x,y,z)的坐标原点;M表示旋转变换矩阵.当仿真人控制双轴关节运动旋转时,则有:
RoM(α,β)=Ry(α)Rx(β) ,
(6)
式中,α表示绕y轴的旋转角度;β表示绕x轴的旋转角度.当仿真人控制多轴关节运动旋转时,则有:
RoM(γ,α,β)=Rz(γ)Ry(α)Rx(β) ,
(7)
式中,γ表示绕z轴的旋转角度.且在上述计算过程中,仿真人的每个关节的运动过程,都会受到运动员的真实运动情况的约束,即θmin≤θ≤θmax,其中θmin代表运动员跑步训练过程中,关节旋转产生的最小角,θmax代表运动员跑步训练过程中,关节旋转产生的最大角[10].
根据此时确定的仿真人关节旋转角度控制,对仿真人运动姿态进行校准.此次仿真的人运动关节校准是以右侧肩膀为例,因此,仿真人的右肩关节绕z轴旋转90°后才能与绝对坐标系一致,则有:
R(M)=Rz(90°) ,
(8)
式中即为仿真人运动姿态校准标准.仿真人体在运动过程中,是按照层级关系依次连接起来的有序关节链结构[11].因此设定仿真人在坐标系(x,y,z)中,关节旋转顺序为B-A-C,其旋转过程中,产生的角度值为δ、ϑ和φ,此时仿真人的相对旋转矩阵为:
RoMi=RB(δ)RA(ϑ)RC(φ) ,
(9)
式中,i表示相对值;RoMi为相对值i的旋转矩阵.此时设r表示绝对值,则绝对值的相对值i旋转矩阵rRoM为:
rRoMi=rRoMi-1RoMi,
(10)
式中,rRoMi=RoM1,则仿真人的对应关节旋转矩阵为:
rRoMi=rRoMiRi(M) ,
(11)
式中,Ri(M)表示相对值旋转变换矩阵的校准矩阵,此时,仿真人按照B-A-C顺序,依次偏转的角度δ、ϑ和φ,则可以求出仿真人关节运动角度矩阵为:

(12)
根据式(12)即可得到仿真人与运动员相一致的关节运动角度.此时即可对仿真人的关节转动、关节转动角度和仿真人运动角度实现控制,建立运动员跑步运动循环周期模型,并分析远动员跑动过程,采用反映帧图像,得到运动员跑步训练强度的连续帧仿真,形成运动员跑步动画图像,从而分析运动员跑步训练强度.
2 分析运动员跑步训练强度
采用反映帧图像,得到运动员跑步训练强度的连续帧仿真,形成运动员跑步动画图像,从而分析运动员跑步训练强度.由于人体在跑步过程中,通过腿和手臂的前后摆动,交替支撑身体平衡,完成跑步运动[12].因此会形成运送员跑步循环运动周期,如图2所示.

图2 人体跑步运动循环周期
从图2中可以看出,运动员在跑步过程中,可以将跑步的循环周期分为两个阶段,即单脚支撑期和悬空期[13].此时设一个步长的单脚支撑期为c,其单脚支撑期持续时间为tc,摆动期为m,其摆动期的持续时间为tm,悬空期为g,其悬空期持续时间为tg,一步所需时间为t,则有:
(13)
通过式(13),即可得出运动员跑一步所需要的时间.此时,根据图2,可以将人体跑步运动可以分为4种状态,如图3所示.

图3 人体跑步运动4个状态
从图3中可以看出,人体跑步的第1阶段为脚跟着地时刻,第2阶段为单腿支撑中间时刻,摆动腿以骸关节为轴摆动至大腿与地面垂直的位置[14].从人体跑步的第2阶段单腿支撑中间时刻到第3阶段脚尖离地时刻,摆动腿继续以髓关节为轴继续摆动达到最大摆动角度.从人体跑步的第3阶段脚尖离地时刻到第4阶段另外1条腿着地时刻,可以发现此时的人体关节会在坐标平面上,呈现出一条抛物线形态[15].因此设右腿脚尖离地时,骸关节在x轴的坐标为x1,骸关节在y轴的坐标为y1,在跑动过程中,悬空的高度为H,运动员一步的速度为v,则有:
(14)
此时通过式(14)就可以得到运动员在跑步过程中,产生的运动强度数据.根据式(5)、(7)得到的关节旋转角约束,即θmin≤θ≤θmax,得到仿真人控制方法,控制仿真人完成跑步训练强度仿真.
基于图1的运动员跑步训练强度仿真流程,将上述计算内容代入此次设计的运动员跑步训练强度仿真过程,即可在计算机的仿真平台上,完成运动员跑步训练强度仿真.
3 实验论证分析
为验证此次利用反映帧间图像界定运动员跑步训练强度仿真方法的有效性,设计此次对比实验.实验所用开发语言为C++,选取Visual studio 2013平台作为此次实验研究的仿真平台,为促使仿真结果具有立体效果,采用OpenGL实现二维平面和三维空间效果.此次研究的实验对象为跑步运动员,其年龄为35岁,身高1.85,体重66 kg,此时采取Perception Neuron动态图像捕捉设备,捕捉此次实验选择的运动员在跑步过程中的运动图像,捕捉过程中,将运动图像的采样频率设为60 Hz.为保证实验的严谨性,在采集过程中,将采集帧数设为500帧,并采用Windows7计算运动员运动数据,得出仿真结果.
在上述设定的实验对象和实验环境下,以文献[5]、[6]方法作为实验对比方法,基于运动员跑步训练强度仿真方法的特点,从仿真运动员跑步运动姿态和仿真过程数据两个方面,检测3种方法仿真结果与人体真实跑步运动模型的一致度;检测仿真过程中的可视性、可达性、空间占用率、空间大小和仿真时间的高低.为了保证此次实验仿真方法的可靠性和真实性,进行50次实验,并将所得仿真运动员跑步运动姿态和仿真过程数据对比结果按实验次序绘成图表,对比不同方法对运动员跑步训练强度仿真的准确性.
3.1 运动员跑步运动姿态仿真
在上述设定的实验参数下,采用3种仿真方法,针对运动员跑步运动姿态,进行仿真.将3种仿真方法的仿真结果,分别与真实人体运动图进行对比,判断3种仿真结果与真实人体运动图的近似度.其实验对比结果如图4所示.
从图4中可以看出,文献[5]方法对运动员跑步运动姿态进行仿真,其左右手小臂摆动幅度明显比真实人体运动图摆动幅度小,不符合正常人体跑动时手臂摆动规律;文献[6]方法左右手的摆动幅度,虽然与文献[5]方法更相近,但是依然与文献[5]方法左右手摆动幅度不一致;而所提方法,却与人体真实跑步运动模型手臂摆动幅度几乎完全一致.

图4 仿真结果对比图
为了进一步对比3种仿真方法,建立运动员跑步运动姿态在空间坐标系(X,Y,Z)上右手的运动路径,其对比结果如图5所示.

时间/ms(a)右手X轴方向

时间/ms(b)右手Y轴方向
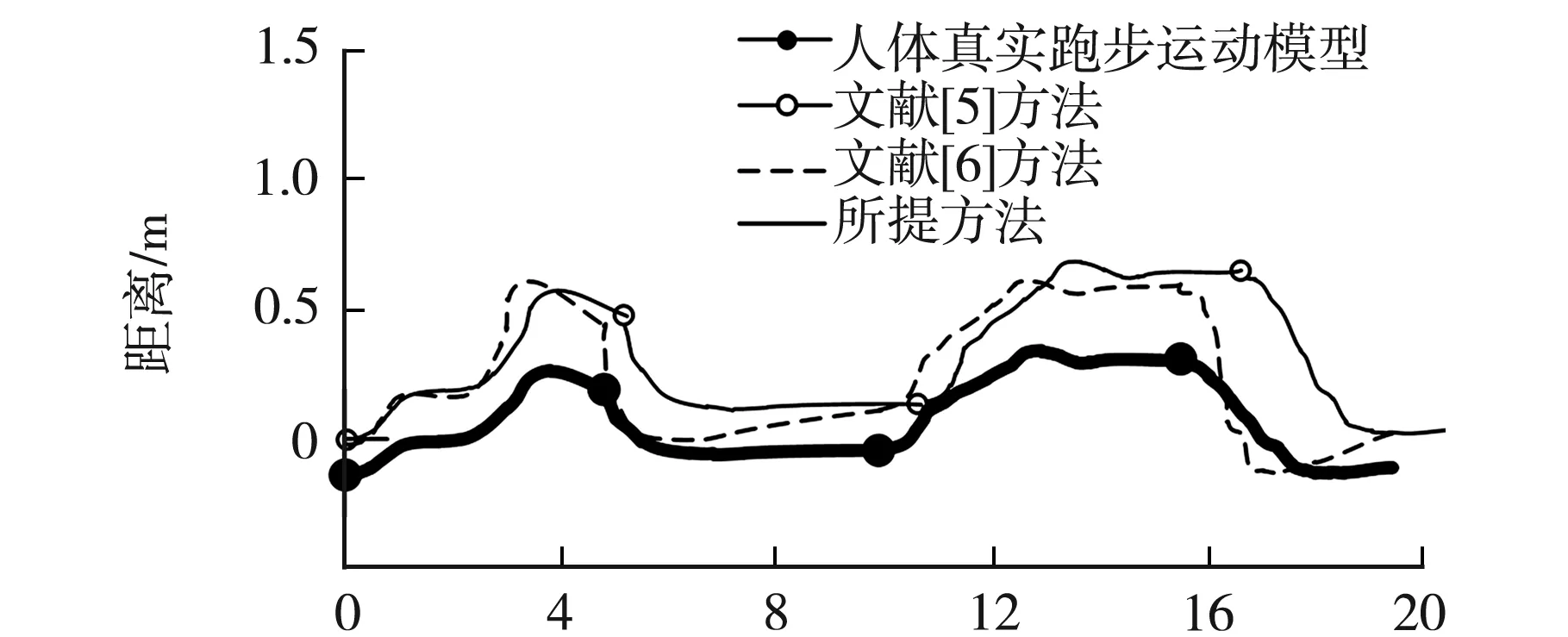
时间/ms(c)右手Z轴方向图5 空间坐标轴中右手和右手肘的运动路径
从图5中可以看出,文献[5]和[6]方法,右手的运动路径与人体真实跑步运动模型在空间坐标系(X,Y,Z)上完全不一致;而所提方法,右手的运动路径与人体真实跑步运动模型在空间坐标系(X,Y,Z)上完全一致.由此可见,所提方法可以完全仿真人体真实跑步运动过程,分析运动员运动过程.
3.2 运动员跑步运动过程数据仿真
为保证此次实验的严谨性,在第1组实验的基础上,进行第2组实验.在此次实验中,采用实验设计和第1组实验参数,统计3种仿真方法对运动员运动强度仿真的可视性、可达性、空间占用率、空间大小和仿真时间.其统计结果如表1所示.

表1 第1组实验数据统计表
从表1中可以看出,文献[6]方法仿真得到的可视性、可达性低,对空间占用率、空间大小高,仿真时间长;文献[5]方法仿真得到的可视性、可达性虽高于文献[6]方法,但依然没有达到0.9,属于偏低状态,对空间占用率、空间大小虽低于文献[6]方法,但依然偏高,仿真时间偏长;而所提方法可视性、可达性明显高于文献[5]、[6]方法,空间占用率、空间大小和仿真时间明显低于文献[5]、[6]方法由此可见,此次设计的运动员跑步训练强度仿真方法对运动员跑步训练强度仿真,可视性、可达性高,空间占用率、空间大小和仿真时间低,仿真实际效果更高.
综合上述两组实验,此次研究的运动员跑步训练强度仿真方法,可以准确仿真运动员跑步训练姿态,且仿真效果更高,可以更准确分析出运动员跑步训练强度,将得出的仿真结果应用于运动员实际训练中,能够有效提升运动员的训练效率.
4 结 论
综上所述,研究反映帧间图像界定运动员跑步训练强度仿真方法,充分利用反映帧间图像将运动员跑步训练强度仿真结果形成连续虚拟的运动员跑步训练动画,以便界定运动员跑步训练强度.仿真实验表明,所提方法对人体真实跑步运动手臂摆动的仿真精准度较高,能够准确分析运动员的运动过程.通过本文的仿真研究,可以为运动员的实际跑步训练监督做出一定贡献,提升运动员训练效率.
但此次研究的未曾对计算运动员跑步过程中捕获到的数据进行去噪处理,仿真的运动员跑步训练仿真精度有待提高.因此在今后的研究中,需要精细处理运动员跑步训练参数,提高运动员跑步训练仿真精度.