分数阶滑模控制算法在四容水箱中的应用及仿真
2021-08-31白淏文韩光信
白淏文,韩光信
(吉林化工学院 信息与控制工程学院,吉林 吉林 132022)
四容水箱系统可以在工业生产过程中模拟很多被控对象[1],如在石油气泵水位控制、化工精馏塔控制等许多行业都有体现,如何更好地解决多输入多输出系统的耦合性以实现更准确的控制精度是当今工业生产中的热门研究话题[2].针对四容水箱实验装置,文献[3]将无模型自适应算法引入到其中,可以不需系统模型仅凭输入输出关系实现对系统控制.文献[4]设计隐式广义预测自校正控制,通过预测值、滚动优化、反馈校正等环节极大增强了鲁棒性.文献[5]通过将系统解耦变成单输入单输出系统,对解耦后的每个单输入单输出系统进行控制,使用不依赖精确模型的自抗扰控制器对每个独立系统进行控制,使得系统的复杂程度大大降低.
在各种控制方法中,滑模控制方法有着诸多优点.如设计简单、对参数摄动的不敏感性、对外部扰动具有很强的鲁棒性[6],这些特性使得滑模控制方法得到了广泛的应用.传统积分滑模面具有响应速度快、调节时间短等特点,但是系统如果与设定值误差过大会使积分饱和,从而导致系统超调过大、抖震剧烈[7].分数阶的微分算子和积分算子可以选择为任意实数,扩大了参数选择范围,使得在参数调节上有了更大的选择范围[8].本文将滑模控制与分数阶理论结合,针对系统可能会出现超调量过大的问题将积分和微分环节引入滑模面的设计当中,使用具有分数阶结构的滑模面和趋近率,提升了控制效果且系统具有较强的鲁棒性.
1 四水箱系统的数学描述
四水箱结构如图1所示.

图1 四容水箱结构图
水泵1将储水池液体送至水箱4和1,水泵2将储水池液体送至水箱2和3.调节水泵1和2电压可进行控制回路水流量的调节.水泵1和2送至水箱1和2液体流量可以通过手动阀门进行调节,在该实验装置中起到进水阀分流作用.水箱1和2通过底部管道相连接,可以通过改变分流系数比调节代表不同水箱之中的耦合和干扰作用.最终使得下水箱液位快速、准确地跟踪上设定液位高度,减小系统内部耦合的影响.
根据质量守恒定律及伯努利原理对系统进行建模:

(1)
式中,hi为容器液位高度;A为容器横截面积;γ1,γ2为可调输入;d1,d2为干扰输入.
由式(1)可以看出水位与输入电压呈非线性关系,水泵1的电压与水箱1和2有关,水泵2的电压也影响着水箱1和2.水泵1和2的共同作用使得控制系统难道增加,呈现出多输入多输出、非线性、强耦合特性.
在平衡工作点[h10,h20,h30,h40,v10,v20]将系统转化为如下状态空间模型:

(2)
其中状态变量为xi=Δhi=hi-hi0控制输入为ui=vi-vi0,由式(2)可得到线性化处理后四容水箱状态空间表达式:

(3)

2 分数阶滑模控制器设计
将分数阶微积分理论与滑模控制相结合,首先设计分数阶滑模函数s.因为分数阶增加了系统控制的灵活性,可以展现良好的动态性能,使得系统到达滑动模态后误差逐渐收敛为零,其次设计分数阶滑模趋近率,使得系统进入到分数阶滑模面后在这个区域保持滑模运动[9].
设轨迹跟踪误差系统
e=y-yd,
(4)
式中取yd为液位期望轨迹;y为液位实际轨迹.则控制目标为对液位h1和h2的跟踪,即t→∞时,e→0.
对式(4)求导:
(5)
传统整数阶滑模在设计时,通常选择误差和误差的积分项作为滑模面函数,当系统与设定值误差过大或者控制器出现饱和,就会出现积分饱和效应,进而导致控制系统性能较差,甚至导致系统的不稳定[10].
设计分数阶滑模面为:
(6)
对滑模面式(6)求导:
(7)
滑模趋近律可改善系统运动过程中的趋近性能,抖震剧烈、收敛时间较长是传统滑模趋近率选择的一大难点,为此将分数阶微积分理论引入到滑模趋近律中.
选取分数阶趋近律
(8)
其中sgn(s)=[sign(s1)|s1|θ1,sign(s2)|s2|θ2].
由公式(7)和公式(8)可得:
=-ks1s-ks2sgn(s),
(9)
得到设计的滑模控制律
(10)
设李亚普诺夫函数为:
(11)
对式(11)求导:
(12)
由于sign具有如下性质:
所以式(12):
(13)
根据李雅普诺夫稳定性判据可以得到分数阶滑模控制可以使系统渐进稳定.
3 仿真分析
为了验证方法的有效性选择四容水箱作为控制对象,其参数如下:水箱1和3的横截面积为28 cm2;出水管横截面积0.071 cm2;水箱2和4的横截面积32 cm2出水管横截面积0.057 cm2;水泵1和2流量比例系数分别为3.33、3.35;水泵1和2分配系数分别为0.70、0.60;选择kd1与kd2为幅值为1的正态分布随机数.通过MATLAB实验仿真平台,选择分数阶PID方法与本文分数阶滑模控制方法进行比较.
3.1 动态性能分析
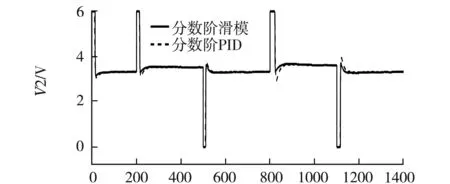
动态性能是系统在动态过程中所表现出的性质、特点及性能情况.选择水箱1和2的初始液位高度分别为8、10 cm.图2~3中点划线为理想液位,黑色实线为实际液位.在200 s时刻水箱1设定值越变为12 cm,水箱2设定值越变为14 cm.在800 s时刻水箱1设定值越变为13 cm,水箱2设定值越变为15 cm.两种轨迹呈交替上升、下降规律.在分数阶滑模控制下,液位h1和h2很好地完成了追踪过程,分数阶滑模控制能够实现四容系统设定液位值的快速跟踪,超调量较小.考虑到电压不能超过控制器电压幅值,将电压限幅为0~6 V.在设定液位值发生变化时,系统比分数阶PID具有更快速的液位跟踪,如图4~5所示,更小的超调量,电压运行在控制器电压合理区间内,稳定较快.两个水箱设定值分别变化于不同高度时,两个水箱液位之间互不影响,系统具有很好地抗干扰能力.很好地解决了系统耦合问题,追踪上了理想液位.

t/s图2 水箱1液位变化曲线

t/s图3 水箱2液位变化曲线
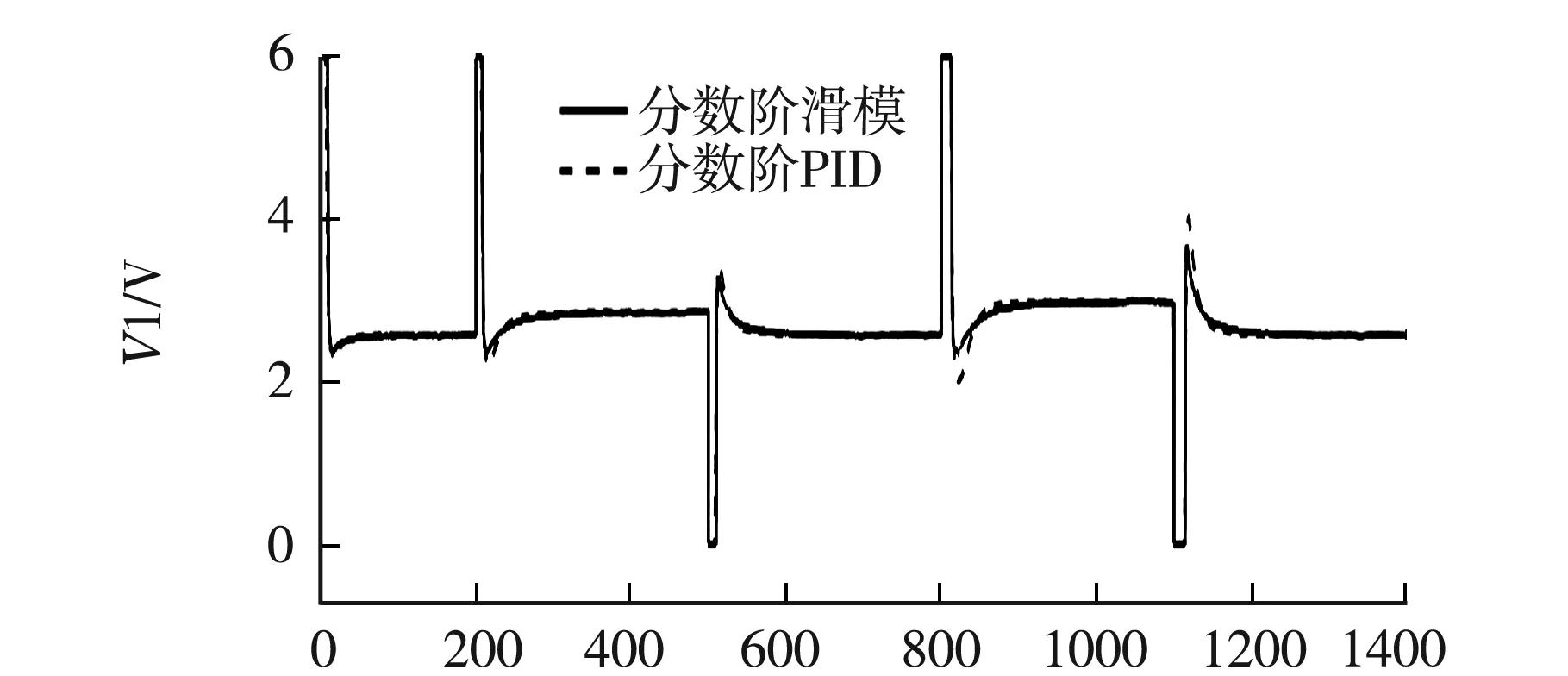
t/s图4 水泵1输入电压变化曲线
t/s图5 水泵2输入电压变化曲线
3.2 鲁棒性能分析
令γ1,γ2,k1,k2增大10%,在200 s时增加干扰,水箱1设定液位上升,水箱2设定液位下降.研究水箱液位及参数变化时的动态响应情况.水箱1和2的液位变化曲线如图6~7所示.
t/s图6 水箱1液位变化曲线

t/s图7 水箱2液位变化曲线
从图6~7中可以看出,在0~200 s时,初始液位与设定液位存在较大误差,控制器会输出较大电压,但考虑水泵电压安全范围,对控制器进行约束,从而起到保护水泵作用.与分数阶PID相比,系统在分数阶滑模控制下具有一定超调,但超调较小调节时间快.分数阶PID控制超调较大,系统稳定时间慢.当参数摂动时,分数阶滑模超调量、调节时间等性能影响不大,水箱1上升水箱2下降的耦合性基本消除,可以很快追踪上给定液位,可见系统在分数阶滑模控制下具有良好的鲁棒性.控制输入的变化曲线如图8~9所示.

t/s图8 水泵1输入电压变化曲线

t/s图9 水泵2输入电压变化曲线
4 结 论
本文以双输入双输出、非线性、强耦合的四容水箱系统作为研究对象,将分数阶理论引入到滑模控制中,使用分数阶滑模控制器对四容水箱液位控制系统进行仿真,并对控制器渐进稳定条件进行了理论证明.仿真结果表明分数阶滑模控制与分数阶PID相比,分数阶滑模算法中引入了分数阶算子、微分算子扩大了控制器适用范围,避免了出现控制超调过大,有良好的的削弱抖震能力,具有更快的收敛时间和跟踪性能.在外界扰动和参数摄动情况下,有效地抑制了干扰对控制系统的影响,具有良好的鲁棒性.