基于机器视觉的植保无人机障碍物检测技术研究
2021-08-31于坤林司维钊
于坤林,司维钊
(长沙航空职业技术学院,湖南长沙,410124)
0 引言
机器视觉的障碍物检测是指利用摄像机代替人眼捕获客观事物信息,通过相关视觉图像处理算法获取事物的轮廓、深度、位置等信息为避障提供依据。植保无人机作业时会遇到建筑物、树木、电线杆等障碍物。因此研究基于机器视觉的植保无人机障碍物检测技术具有重要的应用价值。
1 机器视觉无人机障碍物检测方法
1.1 单目视觉无人机障碍物检测方法
该方法是采用单个摄像头进行连续图像拍摄,通过计算前后两帧图像的特征区域或像素变化来获取物体的运动信息以及判断物体的远近程度[1]。缺点是无法直接测量距离,优点是计算量小、成本低。
1.2 双目视觉无人机障碍物检测方法
该方法是利用两个摄像头从不同的角度来进行拍摄,根据视图差异和几何关系可以得到周围环境的三维信息[2]。缺点是计算量大,优点是获取的空间信息更加精确。
2 基于机器视觉的植保无人机障碍物检测算法流程
当植保无人机飞行方向上有障碍物时,就首先激活视觉传感器对障碍物进行图像采集、然后图像处理模块对障碍物图像进行灰度变化、图像增强、图像滤波等预处理,再对图像进行特征提取与匹配,最后对障碍物进行识别,采用障碍物避障策略进行避障。整个障碍物检测流程如图1所示。
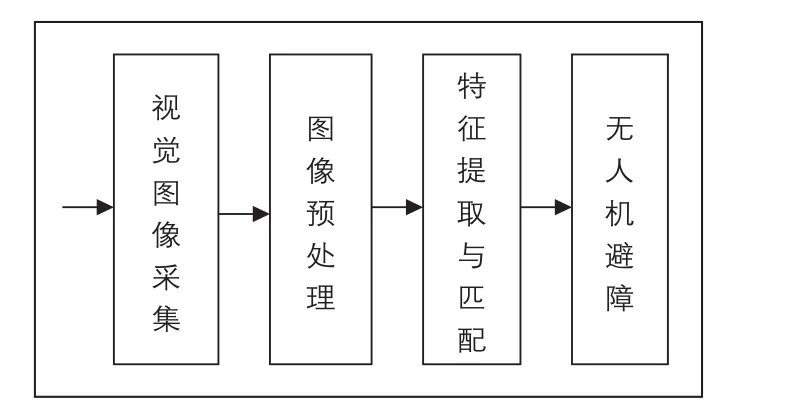
图1 基于机器视觉的植保无人机障碍物检测算法流程
3 基于机器视觉的植保无人机障碍物检测算法研究
3.1 图像预处理
图像预处理包括灰度化处理、图像增强、图像滤波等。这里以树木作为障碍物,树木图像预处理实验如图2所示。
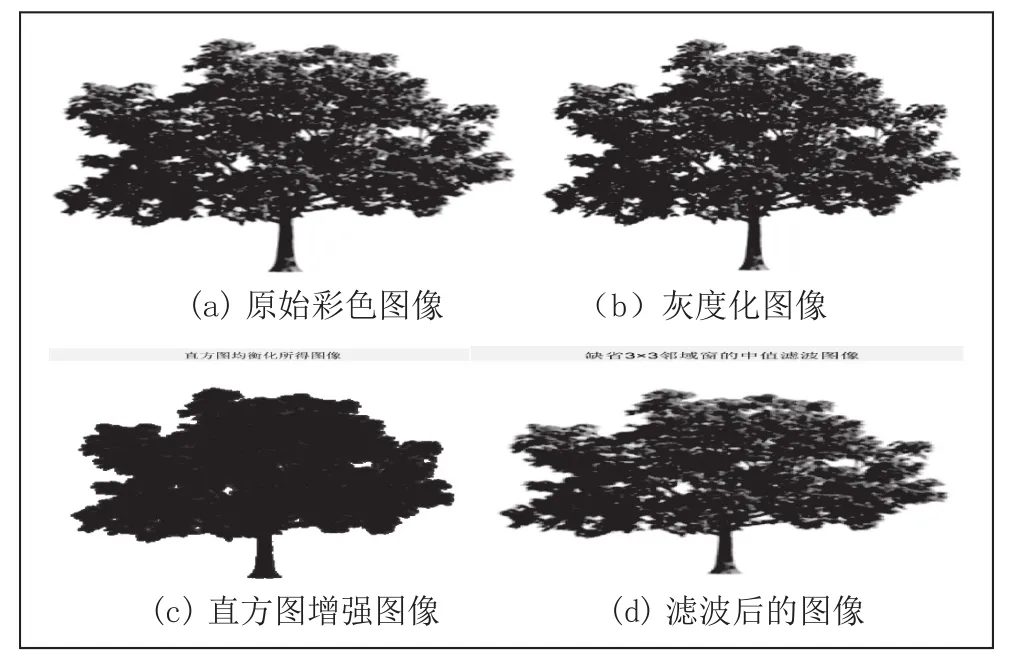
图2 障碍物图像预处理
3.2 图像特征提取与匹配
3.2.1 特征提取与匹配简介
机器视觉中两个重要的技术是特征点提取和匹配,通过对机器视觉图像进行特征点提取与匹配,可以从中提取出障碍物信息,因此图像特征提取与匹配是植保无人机障碍物检测的关键技术。
3.2.2 Harris算法分析
以图像中任一像素为中心,在该中心点设定测试窗口并沿各个方向进行微小移动,计算窗口内的平均灰度变化。如果灰度变化值大于设定的阈值,则窗口中的中心像素点被认为是角点[3]。
Harris角点检测公式如下:

式中:E(x,y)为窗口内的图像灰度变化值,Wu,v是在(u,v)处的系数,I(x+u,y+v)为窗口平移后的灰度值,I(x,y)为原始图像灰度值。
3.2.3 SURF算法分析
3.2.3.1 提取特征点
SURF 算法[4]采用Hessian矩阵行列式来检测特征点,每一个像素点都可以求出一个Hessian矩阵:
式中,Lxx,Lxy和Lyy是点(x,y)分别与高斯函数二阶偏导卷积的结果。
为了提升运算速度, 使用盒式滤波器来代替高斯滤波器,卷积运算后的值分别为Dxx、Dyy、Dxy,其公式如下:

式中,w为权重系数。
3.2.3.2 确定特征点方向
为了确保旋转不变性,SURF算法在特征点区域范围内统计harr小波,计算半径为6S(S为尺度因子)60度扇形内所有特征点的水平和垂直Haar小波特征总和。
3.2.3.3 构建特征描述子
以特征点为中心,构建中心点在特征兴趣点上的正方形区域,将该区域分为4X4个子区域,每个子区域统计5X5个像素的水平方向和垂直方向的harr小波特征。每个子区域得到4维的强度结构描述向量,一共得到64维特征向量。
3.2.3.4 特征点匹配
SURF是通过计算两个特征点之间的欧式距离进行匹配,两个特征点之间的欧氏距离越短, 代表两个特征点的匹配度越好。
3.2.4 特征提取与匹配仿真实验
3.2.4.1 Harris算法的障碍物图像特征点提取与匹配仿真实验
Harris算法的障碍物图像特征点检测仿真实验分别如3(a)和图3(b)所示,Harris算法的障碍物图像特征点匹配仿真实验如3(c)所示。

图3 Harris算法的障碍物图像特征点提取与匹配仿真实验
3.2.4.2 SURF算法的障碍物图像特征点检测与匹配仿真实验
SURF算法的障碍物图像特征点检测仿真实验分别如4(a)和图4(b)所示,SURF算法的障碍物图像特征点匹配仿真实验如 4(c)所示。
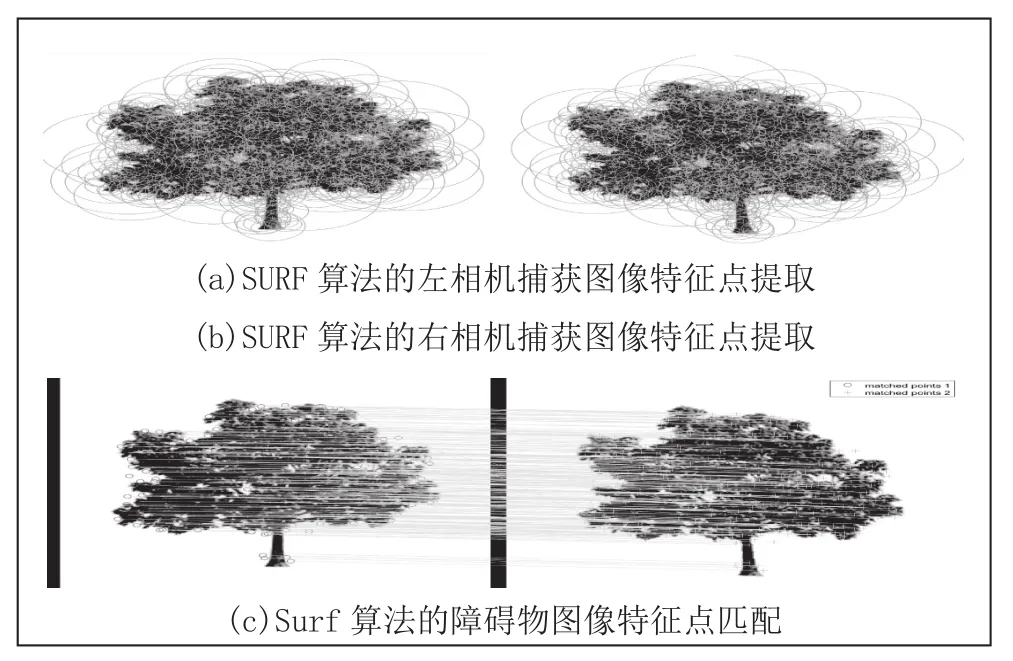
图4 Surf算法的障碍物图像特征点提取与匹配仿真实验
3.2.4.3 实验分析
由实验可知:Harris算法的特征匹配时间为2.467829秒,SURF算法的匹配时间2.126343秒。
SURF算法的速度要快一些。对比图3和图4可以看出:SURF算法检测到的图像特征点数量要多一些且特征点匹配度高。
综上所知,SURF算法具有检测速度快,实时性好,且能够检测出大量的特征点,图像匹配度高等优点,该算法非常适合作为植保无人机障碍物图像特征点的提取和匹配算法,因此可选用SURF算法来检测植保无人机障碍物。
3.3 植保无人机避障
在本文中植保无人机避障是采用垂直避障和左右避障这两种避障策略[5]。当植保无人机作业中检测到前方有障碍物时,就要计算出障碍物高度,然后判断无人机最大飞行高度是否大于障碍物高度。如果最大飞行高度大于障碍物高度,则启动垂直避障方式进行避障。如果最大飞行高度小于障碍物高度,就启动左右避障方式,这时首先要计算无人机距离障碍物左右边界的距离,当距离障碍物左边界较近时,则从障碍物左侧面绕过障碍物飞行,当距离障碍物右边界较近时,则从障碍物右侧面绕过障碍物飞行。
4 结语
本文对基于机器视觉的植保无人机障碍物检测算法进行了分析和研究,并给出了Harris算法 和SURF算法的障碍物图像特征点检测与匹配仿真实验结果。从实验结果来看:SURF算法具有检测速度快,实时性好,且能够检测出大量的特征点,图像匹配度高等优点,将SURF算法用于植保无人机障碍物的自动检测,可以有效地提高检测的效率和准确率。
