一种无锁相环的微电网逆变器预同步控制策略
2021-08-31黎荣伟范元亮许家浩陈浩辉陈思哲
黎荣伟,范元亮,许家浩,陈浩辉,陈思哲
(1.广东工业大学 自动化学院,广东 广州 510006;2.国网福建省电力有限公司电力科学研究院,福建 福州 350007;3.福建省高供电可靠性配电技术企业重点实验室,福建 福州 350007)
微电网是一种能充分发挥分布式能源效益的小型供电系统,它可以将不稳定的分布式电源转变成高质量的电能,是利用新能源的有效途径[1-2]。微电网既可以工作在并网模式下向主电网输出或者吸收功率,也可以工作在离网模式下单独为本地负载供电。微电网逆变器要保证在2种模式下稳定运行的同时,实现2种模式之间的平滑切换。在离网向并网切换时,由于微电网电压的相位和幅值与主电网电压存在偏离,直接合闸会产生瞬时过电压或过电流,危害电网的稳定运行[3-5]。
为确保微电网逆变器并网的平滑切换,学者们研究如何实现微电网电压的相位预同步。传统的相位预同步方法利用锁相环(phase locked loop,PLL)获取微电网电压和主电网电压的相位,通过调节两者的相位差为0来实现同步[6-9],该方法需要3个PI调节器,调节参数众多,控制结构复杂。此外,锁相环对电压相位的突然变化十分敏感,在电压异常波动时动态响应速度较慢,不利于微电网系统的稳定运行[10-11]。文献[12]通过在单环电流控制工作时更新下垂控制的参考相位,实现只需要1个锁相环检测电网相位,省略了2个PI调节器。
由于锁相环的局限性,一些无锁相环的并网策略已经展开研究[13-14]。文献[13]提出基于直接电压鉴相原理的预同步控制策略,使微电网在无锁相环控制的方式下实现预同步。文献[14]提出通过消除微电网电压和电网电压q轴分量的偏差实现相位同步,从而消除锁相环,但需要2次Park变换和积分环节。文献[15]利用微电网和电网的电压构造新的控制变量,通过调节控制变量实现微电网的预同步。文献[16]基于虚拟同步机控制的相位自激能力提出一种预同步控制策略,结构简单,同步时间短,然而仅适用于系统离网状态不带负载的情况。文献[17]利用虚拟阻抗抑制并网电流冲击,实现逆变器并网的平滑切换。文献[18]提出基于虚拟阻抗的预同步控制策略,利用电压差和虚拟阻抗产生虚拟功率,通过调节虚拟功率为0实现下垂控制逆变器的预同步,但难以应用到电压-频率(voltage & frequency,VF)控制策略中。文献[19]提出一种新的相位跟踪环,通过引入虚拟阻抗实现电网电压相位的跟踪,不需要锁相环和PI调节器,参数整定比较简单;然而,此相位跟踪环只适用于离网状态下逆变器没有功率输出的情况,且结构复杂,运算量大。
针对上述问题,本文在现有方法的基础上提出一种新的逆变器预同步控制策略。首先利用微电网与主电网的电压偏差相量和虚拟阻抗计算虚拟电流,然后通过调节虚拟电流为0来实现电压的预同步。该方法不需要锁相环和PI调节器,结构简单,参数整定比较容易,而且免受锁相环延迟和精度的影响,可以快速实现相位的跟踪。与文献[19]相比,本文的方法能够适用于离网状态下逆变器有功率输出的情况,并且在结构上减少了1次Park变换,也不需要计算电压幅值,大大减少了运算量。
1 微电网系统的结构及控制策略
微电网逆变器的结构和整体控制策略如图1所示。逆变器主要由直流电源Udc、三相全桥变流器、滤波器电感L和电容C、本地负载Z、静态切换开关(static transfer switch,STS)、网侧电感Lg、网侧电阻Rg以及电网等构成。当STS闭合时,微电网与主电网连接,逆变系统工作在并网模式;STS断开时,系统以孤岛模式运行。图1中:uo为逆变器输出电压(uoa、uob、uoc为其三相电压),也指微电网的交流母线电压;io为逆变器输出电流(ioa、iob、ioc为其三相电流);ug为公共连接点(point of common coupling,PCC)电压(uga、ugb、ugc为其三相电压),本文提到的电网电压均指PCC点电压;id、iq为输出电流的dq轴分量;ud、uq为输出电压的dq轴分量;Usinθ为三相电压合成环节,θ为相位;θref为参考相位;U0为额定电压幅值;Uref为参考电压幅值;ω0为额定角频率;ωref为参考角频率;Pref、Qref分别为有功功率、无功功率参考值;P、Q分别为实际有功功率、无功功率;n、m分别为有功、无功下垂系数;Rv、Lv为虚拟阻抗;iv为虚拟电流,ivd、ivq分别为其dq轴分量;Kd、Kq分别为幅值、相位调节系数;Uc、ωc分别为电压、角频率调节量;s为拉普拉斯算子;S1、S2为开关。

图1 微电网逆变器电路与控制结构
在并网和离网2种工作模式下逆变器功率外环均采用下垂控制,在运行模式切换时避免了控制策略的切换,减少了切换步骤,控制上的连续性有利于平滑切换[20-21]。逆变器的内环控制器采用基于同步旋转坐标系的电压电流双环控制[22]。首先将有功功率参考值Pref与实际有功功率P的偏差乘以有功下垂系数n,再与额定角频率ω0相加得到参考角频率ωref,经过积分后得到参考相位θref。ω0取主电网的额定角频率314 rad/s。无功功率参考值Qref与实际无功功率Q的偏差乘以无功下垂系数m,并与额定电压幅值U0相加得到参考电压幅值Uref,利用电压幅值和相位信息生成参考电压信号。U0取主电网的额定电压幅值311 V。功率外环产生的参考电压信号通过电压电流双闭环控制和正弦脉冲宽度调制(sinusoidal pulse width modulation,SPWM)生成微电网逆变器的驱动脉冲信号。
2 并/离网平滑切换控制策略
2.1 预同步控制策略
(1)
为了实现微电网和主电网的电压同步,在两者之间引入了一个虚拟阻抗Zv=sLv+Rv,如图2所示,其中:Iv、θiv分别为虚拟电流的幅值和相位;Ug、Uo分别为微电网电压和主电网电压的幅值,θg、θo为对应的相位。
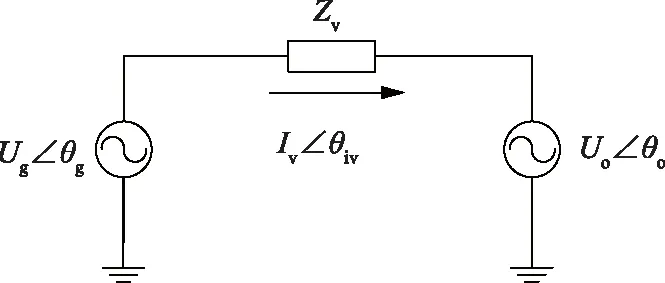
图2 微电网和主电网的等效电路
用电压偏差除以虚拟阻抗可以得到虚拟电流
(2)
即
(3)
当微电网电压和主电网电压的幅值和相位相等时,即Ug=Uo、θg=θo,意味着两者实现同步。无论虚拟阻抗呈感性或阻性,虚拟电流将变为0。因此,可以通过设计相应控制策略调节虚拟电流为0来实现微电网与电网电压的同步。
选取虚拟阻抗为纯阻性阻抗,则虚拟电流的相位与电压偏差的相位一致,其表达式为
(4)
式中Uerr为电压偏差的幅值,θerr为其相位。
虚拟三相电流分别为:
(5)
Park变换矩阵

(6)
由式(5)、(6)可得
(7)

图3 预同步控制过程相量图
通过图3分析各个相量的关系。当电网电压相量的大小不变时,iv的q轴分量ivq可以反映微电网电压和主电网电压的相位关系,而d轴分量ivd可以反映两者的幅值关系。当主电网电压超前微电网电压时,ivq>0,此时微电网电压的频率将会增大,相位差逐渐减小;当主电网电压滞后微电网电压时,ivq<0,此时微电网电压的频率将会减小,相位差也会减小;当两者相位相同时,ivq=0,且θerr=θref。在两者相位相同时:如果两者之间存在幅值差,则ivd≠0;如果两者幅值相等,则ivd=0,且Uerr=0。由分析可得,通过控制ivq=0可以实现微电网电压和主电网电压相位同步,通过控制ivd=0可以实现两者幅值相等。
文献[19]提出的相位跟踪环如图4(a)所示,其作用是检测电网电压相位,将检测到的相位作为逆变器控制的参考相位,不能实现微电网电压对主电网电压的同步。本文提出的预同步控制策略如图4(b)所示,通过消除微电网和电网的电压差实现预同步,适用于微电网状态下逆变器有功率输出的情况。此外,从图4可以看到,本文的策略在结构上减少了1次Park变换,省略了电压幅值计算的环节,故减小了运算量。图4中,u为相位跟踪环生成的三相电压,Kp为相位跟踪环调节系数,Mag.为幅值计算模块。
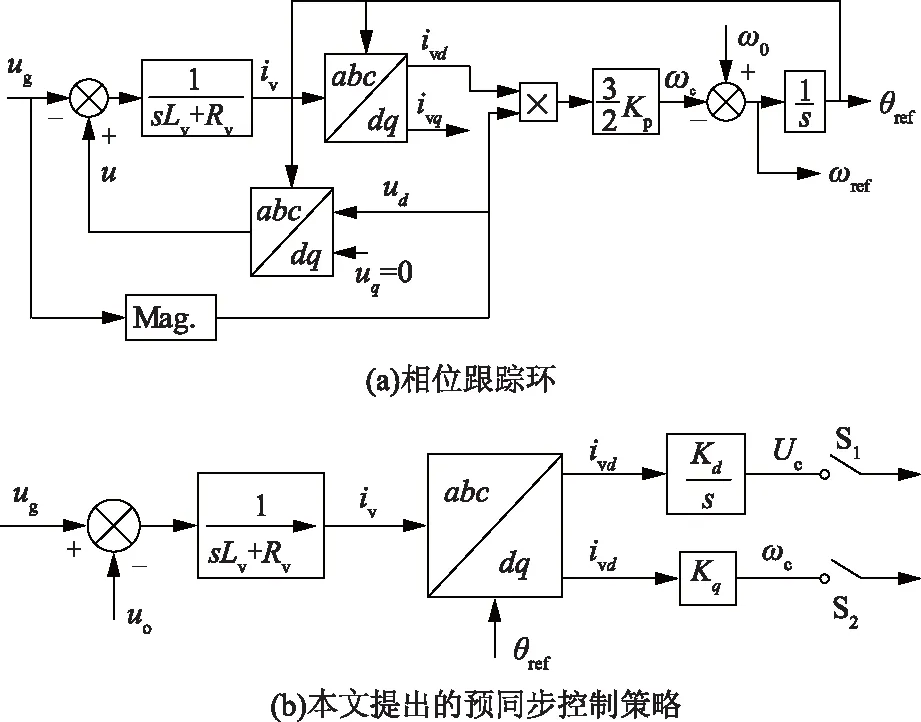
图4 预同步控制
本文提出的预同步控制策略包括2个环节,角频率补偿环节ωc用于实现微电网电压相位同步,由开关S2控制;幅值补偿环节Uc用于实现幅值同步,由开关S1控制。以下垂控制生成的参考相位信号θref作为Park变换的基准,虚拟电流iv通过变换后得到d轴分量ivd和q轴分量ivq。ivq经过相位调节后输出角频率调节量ωc,将ωc与下垂控制得到的角频率相加生成新的参考角频率ωref。同理,ivd经过积分环节后输出电压调节量Uc,再与下垂控制的电压幅值相加生成新的参考电压幅值Uref。故预同步过程中参考角频率和电压幅值的表达式分别为:

(8)
由于电压幅值生成过程中没有积分环节,为了实现无静差控制,需要在幅值补偿环节中采用积分环节。本文提出的预同步控制策略通过角频率补偿和幅值补偿实现,除了适用于下垂控制,还能应用于VF控制。
由于虚拟电流并不真实存在,虚拟阻抗的取值范围较宽,当其取值较小时可以快速完成同步,但是取值太小会导致虚拟电流很大,调节量过大造成电压和电流冲击。本文设置Rv=0.5 Ω、Lv=0。根据电压差和虚拟阻抗的大小,虚拟电流可能高达额定电流的几倍。为了限制虚拟电流,相位调节系数Kq的取值范围为0~0.5。经过相位预同步控制后,虚拟电流的值减到较小,故幅值调节系数Kd的取值相对较大,本文取Kd=20。
2.2 离网向并网切换
为了避免微电网在并网切换过程中的电流冲击,要预先运用预同步控制消除微电网与电网之间的电压偏差。如图1所示,并网前首先利用电网三相电压和微电网三相电压计算虚拟电流,接着闭合开关S2,角频率补偿环节开始工作,虚拟电流q轴分量ivq逐渐减小,待ivq接近0后,闭合开关S1,幅值补偿环节开始工作,虚拟电流d轴分量ivd接近0时预同步结束,最后闭合STS,并断开开关S1和S2,完成微电网离网向并网平滑切换。需要注意相位预同步和幅值预同步要分开进行,同时工作会使调节量过大造成电压波动。
2.3 并网向离网切换
在STS动作时如果微电网和电网之间存在功率交换,则会造成电压和电流冲击,因此要在STS动作之前减小入网功率至接近0。如图1所示,首先逐渐减小功率参考值至离网模式下的功率输出值,在微电网向电网输送的功率减小为0后,断开STS完成并网向离网平滑切换。下垂控制具有电压源的输出特性,可以在离网模式下为微电网提供电压和频率支撑,内部可以生成相位,所以离网切换不用考虑相位问题。
3 硬件在环仿真验证
通过RT-LAB硬件在环实时仿真平台验证本文提出的平滑切换控制策略和预同步控制策略的有效性[23]。设定逆变器在离网状态下输出有功功率为20 kW,并网后输出有功功率上升至30 kW,无功功率3 kvar。微电网系统的参数设置见表1,硬件在环仿真平台如图5所示。

表1 系统参数

图5 基于RT-LAB的微电网系统仿真平台
3.1 并网切换
在t=0.4 s前逆变器以离网模式运行;在t=0.4 s时,启动预同步控制;t=0.8 s时,STS闭合,微电网并网切换。硬件在环仿真结果如图6所示。图6(a)给出微电网A相电压uoa与电网A相电压uga的动态对比波形图和电压相位差Δθ的波形图。在并网前,微电网与电网电压之间的相位差超过50°,在预同步控制启动后,相位差迅速减小,约0.1 s后完成微电网电压的相位追踪。图6(b)和(c)给出了微电网并网切换的功率、逆变器输出电流波形。在离网模式下,逆变器向本地负载供电,输出有功功率20 kW。完成电压预同步后,STS闭合,微电网连接电网向电网输送功率,有功功率和无功功率逐渐增大,功率曲线平滑,逆变器输出电流没有冲击,实现并网的平滑切换。

图6 微电网系统离网向并网切换波形
3.2 离网切换
在离网之前,需要将逆变器向电网输送的功率减小为0,防止由于切换前后功率不平衡引起电压电流波动。图7给出了微电网离网切换的输出电流和功率波形。在切换前,逆变器输出的功率逐渐减小到与本地负载相匹配,微电网和电网的功率交换接近0;随后断开STS,微电网切换至离网模式运行,切换过程中功率过渡平滑,逆变器输出电流没有冲击。

图7 微电网系统并网向离网切换波形
4 结束语
针对微电网并网时由于电压相位差导致并网电流冲击的问题,本文提出一种无锁相环的预同步控制策略。与传统的相位预同步控制策略相比,本文所提出的预同步环节不需要使用PI调节器,并且控制策略不受锁相环的延迟和精度影响。与现有技术相比,本文的策略适用于微电网状态下逆变器有功率输出的情况,并且结构更加简单。将该策略和下垂控制相结合,提出一种完整的并/离网模式平滑切换的控制策略。仿真结果表明,本文所提出的预同步控制策略可以有效跟踪电网电压相位,而且运算量小,同步的速度较快,利于实现微电网运行模式之间的平滑切换。此策略除了应用在下垂控制还可以推广到其他的控制器中,实现离网向并网的平滑切换。
