基于改进型LADRC的SAPF双闭环控制策略研究
2021-08-30周雪松崔阳阳马幼捷孙小桐陈昱龙葛建鹏
周雪松,崔阳阳,马幼捷,孙小桐,陈昱龙,葛建鹏
(1.天津理工大学电气电子工程学院,天津 300384;2.天津理工大学天津市复杂系统控制理论及应用重点实验室,天津 300384)
随着用电设备的增加以及非线性负荷的大量投入,电网被注入了大量的谐波,使得电网电流波形发生严重畸变,造成电能质量下降,从而对用电设备的正常工作造成了严重的影响[1]。因此,有效地治理谐波污染问题,对提高电能质量至关重要。为合理地治理电网谐波污染问题,有源电力滤波器(active power filter,APF)因其良好的谐波治理功能,受到人们广泛的关注。
目前,APF 大多采用传统PID 控制,但面对高精度的控制要求,传统PID 控制显现出巨大局限性,难以满足要求[2]。自抗扰控制技术是韩京清研究员结合传统PID控制器和现代控制理论内在思想,在不断进行深入研究过程中提出的[3]。但传统非线性自抗扰控制器(active disturbance rejection controller,ADRC)算法较为复杂,参数众多,使得参数整定极为繁琐。基于此,高志强博士提出了LADRC,大大简化了参数整定,具有很好的工程实用价值[4]。但传统LADRC 在简化了参数整定的同时也降低了控制性能。
为解决以上问题,本文提出一种用于三相三线制SAPF 的改进型LADRC,该改进型LADRC 基于误差控制原理,通过引入新的误差来作为总扰动的调节依据。同时,应用于SAPF 电流内环和电压外环双闭环控制,既加快了SAPF 的电流跟踪速度,又提高了直流侧电压的稳定以及系统的抗扰动能力。最后,通过Matlab&Simulink 仿真验证了该改进型LADRC的正确性和有效性。
1 三相三线制SAPF 数学模型及传统LADRC控制系统设计
1.1 三相三线制SAPF数学模型
三相三线制SAPF 主要由电源、非线性负载和有源电力滤波器三部分组成,其中有源电力滤波器控制系统由指令电流运算电路、电流跟踪控制电路以及驱动电路三部分构成[5],如图1 所示。图1中,ua,ub,uc为三相电网电压;isa,isb,isc为三相电网电流;uA,uB,uC为PWM 变流器的输出电压;iLa,iLb,iLc为负载电流;ia,ib,ic为滤波器实际输出的谐波补偿电流;L 为滤波器输出滤波电感;R 为IGBT 开关损耗的等效电阻;C 为直流侧电容;Ud为直流侧电压;i∗为谐波指令电流。
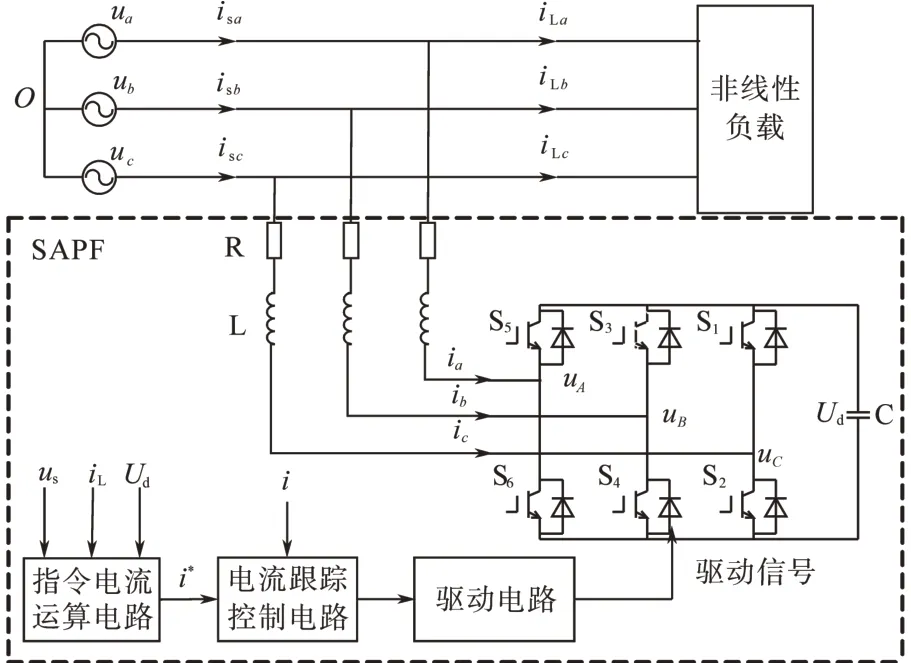
图1 三相三线制SAPF系统原理图Fig.1 Schematic diagram of three-phase three-wire SAPF system
为建立三相三线制SAPF 的数学模型,设Sj(j=A,B,C)为开关函数,Sj= 1 表示j桥臂上管处于导通且下管处于关断状态,Sj= 0 时的开关状态则相反。bmwm(m=a,b,c)表示开关损耗、检测误差以及外部因素等对系统的干扰[6]。
由开关函数可得:

由于直流侧电压Ud是不断变化的,故可将Ud用ud表示。假设三相电源电压和电流对称,针对图1可得三相三线制SAPF交流侧方程为
若开关频率很高,且已经忽略开关损耗,可以用占空比dj代替开关函数Sj,得到三相三线制SAPF状态空间表达式为[7]

其中

上述模型即为系统忽略高频成分的简化数学模型。
1.2 传统LADRC控制系统设计
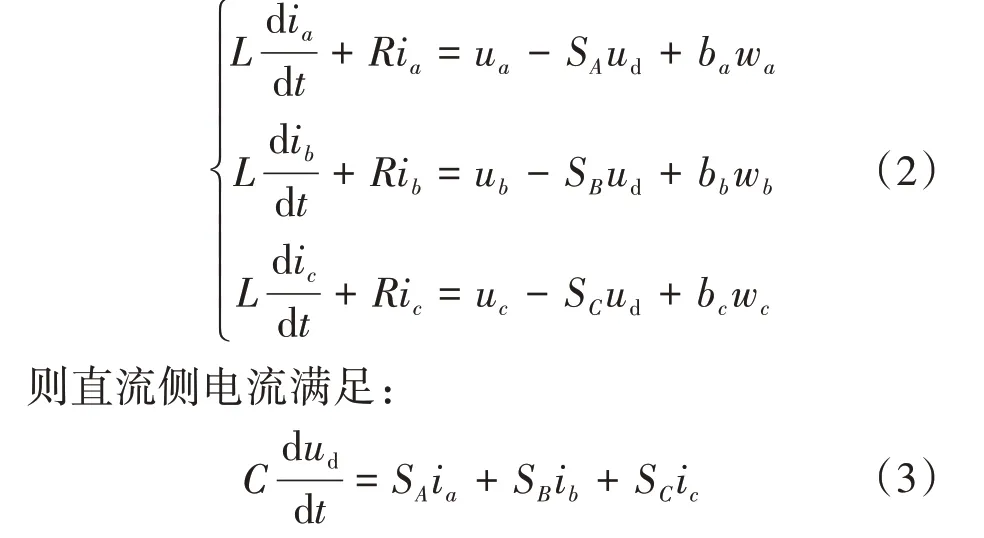
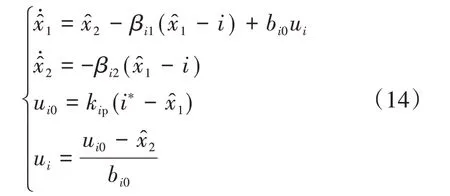
在三相三线制SAPF 控制系统中,不仅要对谐波电流进行控制,使得补偿电流能够无误差地跟踪谐波电流,还要对PWM 变流器的直流侧电压进行控制,以维持直流侧电压的稳定[8]。本文设计的SAPF 控制系统采用电流内环和电压外环双闭环控制方式。其控制系统结构图如图2 所示。在该控制系统中,SAPF 所产生的谐波补偿电流ia,ib,ic以及PWM变流器的直流侧电压ud、系统的电流内环总扰动fi和电压外环总扰动fu作为该系统的模型变量。
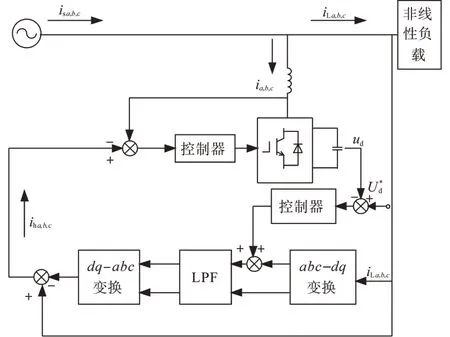
图2 SAPF双闭环控制系统结构图Fig.2 Structure of SAPF double closed loop control system
传统LADRC控制框图如图3所示。
图3 传统LADRC的控制框图Fig.3 Control block diagram of traditional LADRC
传统LADRC 的结构主要包括LESO、线性状态误差反馈控制律(linear state error feedback,LSEF)以及总扰动补偿环节三大部分构成。其控制模型分别如下式所示:
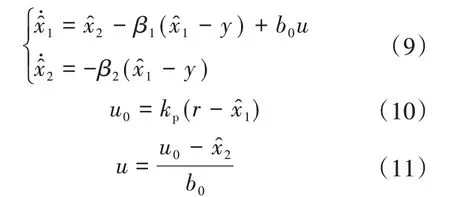
其中,所有的观测器极点都配置在观测器带宽处,控制器极点则要配置在控制器带宽处,即

则
式中:ωc为控制器带宽;ω0为观测器带宽。
1.2.1 基于传统LADRC的电流内环控制器设计
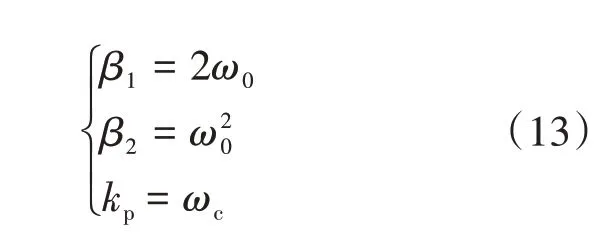
在SAPF 电流内环控制中,采用3 个一阶LADRC对其进行调节。结构原理图如图4所示。
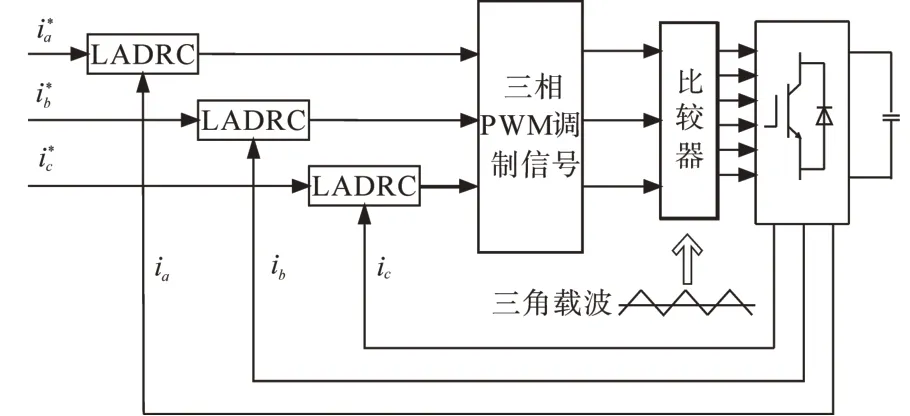
图4 SAPF电流内环控制结构原理图Fig.4 Schematic diagram of SAPF current inner loop control structure
SAPF 的电流跟踪控制技术就是当电网电流发生变化时,SAPF 输出电流能够快速跟踪指令电流的变化[9]。本文所设计的电流内环控制中的信号调制方式采用PWM 跟踪控制技术中的三角波比较方式。
令x1=i,x2=fi作为该控制系统电流内环的控制变量。对于一阶系统,其LSEF 采用纯比例控制,则基于传统LADRC 的三相三线制SAPF 电流内环控制模型为

参数βi1,βi2,kip的取值同式(13)。
1.2.2 基于传统LADRC的电压外环控制器设计电压外环控制的目的是为了将PWM 变流器直流侧电压ud调节至给定值,以维持PWM 变流器直流侧电压的稳定。其中的谐波电流检测环节采用基于瞬时无功功率理论的谐波电流检测方法[10]。其结构原理图如图5所示。

图5 SAPF电压外环控制结构原理图Fig.5 Schematic diagram of SAPF voltage outer loop control structure
令z1=ud,z2=fu作为该控制系统电压外环的控制变量。由以上分析可得传统LADRC 的电压外环控制模型为
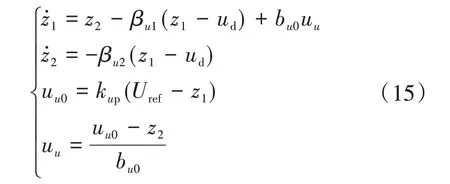
其中
式中:uu为被控对象的输入信号。
参数βu1,βu2,kup取值同式(13)。
2 基于误差控制原理的改进型LADRC及控制系统设计
传统PID 与传统LADRC 都是基于误差而消除误差的控制原理[11]。他们之间的区别在于,PID作为目前90%工业控制领域的控制器是通过控制被控对象输出的实际值与理想的输入值之间的误差来使被控对象输出的实际值准确无误地跟踪给定值,使他们之间的误差趋近于零;而传统LADRC 则是通过控制系统状态变量,使之达到预期的控制效果[12]。
由于三相三线制SAPF 的任一相均为一阶微分方程,故采用一阶LADRC(LESO 为二阶)对其进行控制[13]。
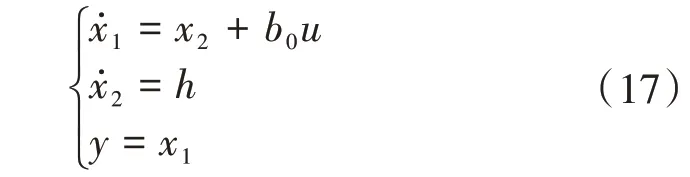
对于一阶系统:

其中,令y=x1为系统输出,x2为总扰动,x˙2=h。则状态方程为
对应的传统二阶LESO的模型为
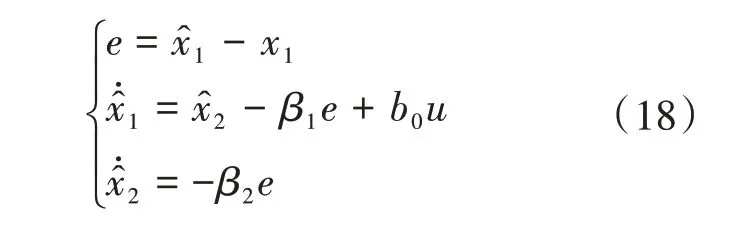

由式(18)可得:将式(17)、式(19)代入式(20)并化简可得:

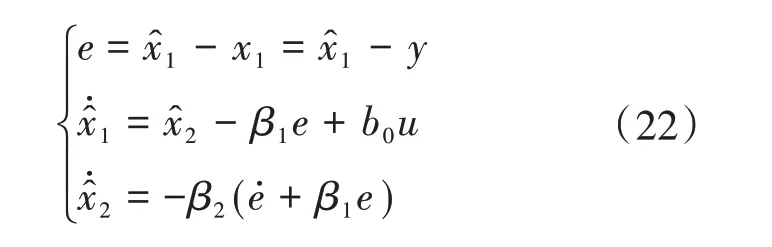
改进型LADRC的控制框图如图6所示。

图6 改进型LADRC的控制框图Fig.6 Control block diagram of improved LADRC
根据自抗扰控制结构以及图6 可知,该改进型LADRC 包括改进型LESO,LSEF(纯比例控制)和总扰动补偿环节三大部分。改进型LADRC 的控制模型分别如下式所示:
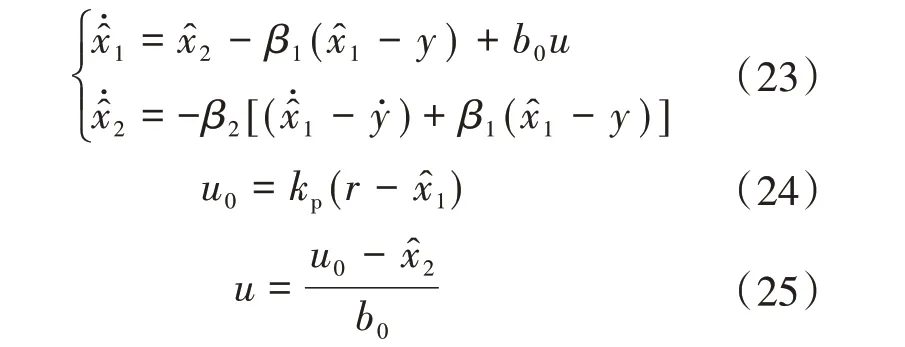
式中:y˙为输出y=i的微分。
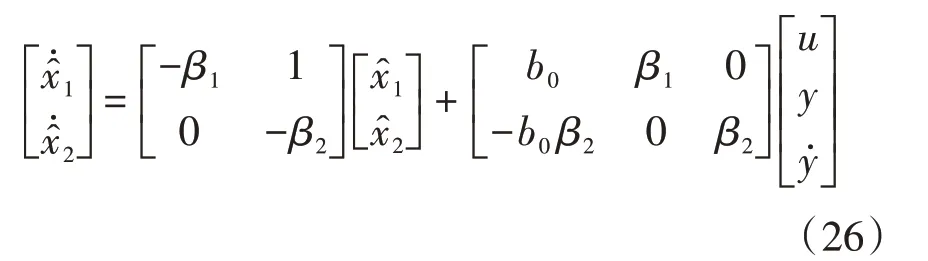
将式(23)化为矩阵形式为需重新对该改进型LADRC进行极点配置,即
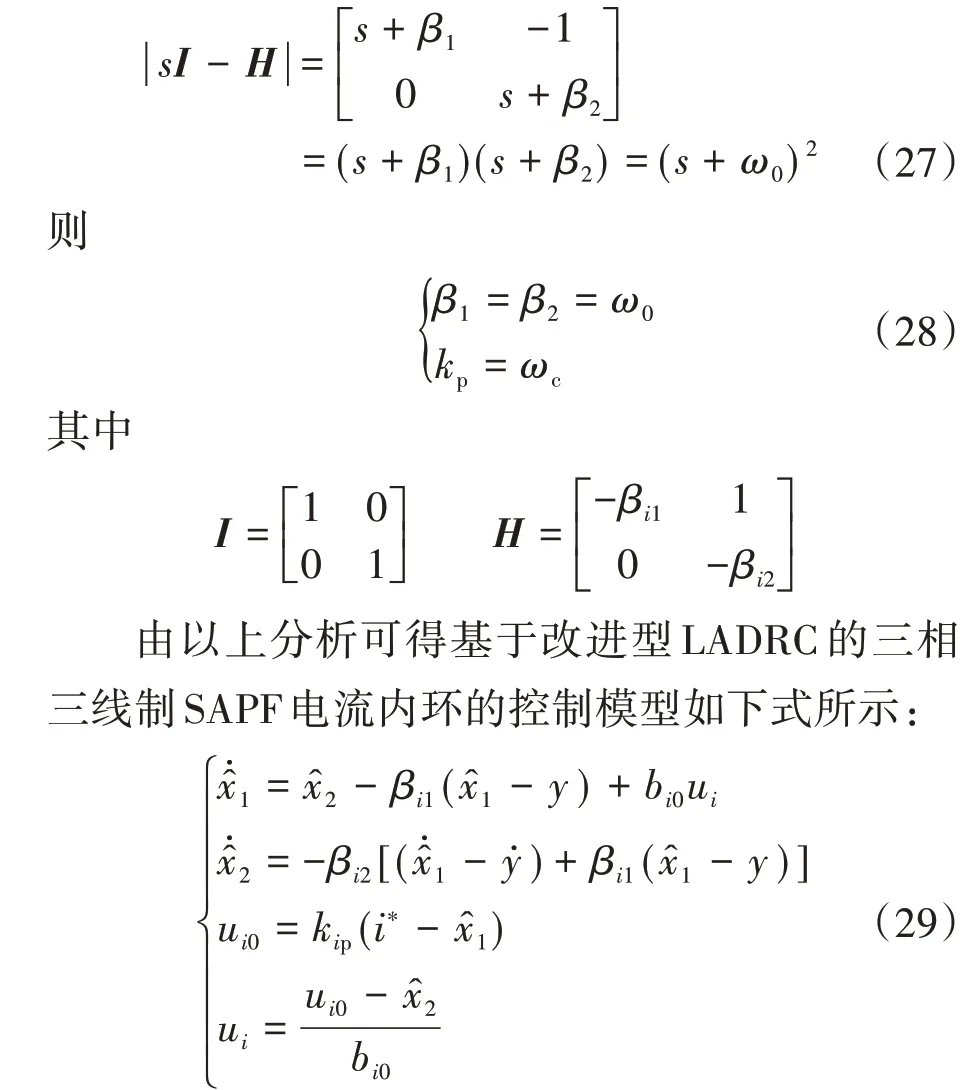
其中,参数βi1,βi2,kip取值同式(28)。在该控制系统模型中,将系统模型变量中SAPF 输出的谐波补偿电流y=i以及系统内环总扰动fi作为SAPF电流内环的控制变量(其中y=i为SAPF 输出的谐波补偿电流ia,ib,ic三相中的任意一相)。
同理可得基于改进型LADRC 的三相三线制SAPF电压外环的控制模型如下式所示:
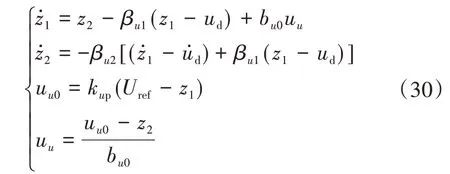
其中,参数βu1,βu2,kup取值同式(28)。在该控制系统的模型中,将系统模型变量中的PWM 变流器的直流侧电压ud以及系统的外环总扰动fu作为SAPF电压外环的控制变量。
3 改进型LADRC的抗扰特性分析
由于LADRC 是一个负反馈控制系统,控制系统的本质问题则是抗扰[15]。本节主要运用频域分析法,对基于改进型LADRC 的三相三线制SAPF 电流内环控制模型的抗扰特性进行分析。同理可证明电压外环控制模型的抗扰特性。
将式(29)转化成传递函数并代入式(28)可得:
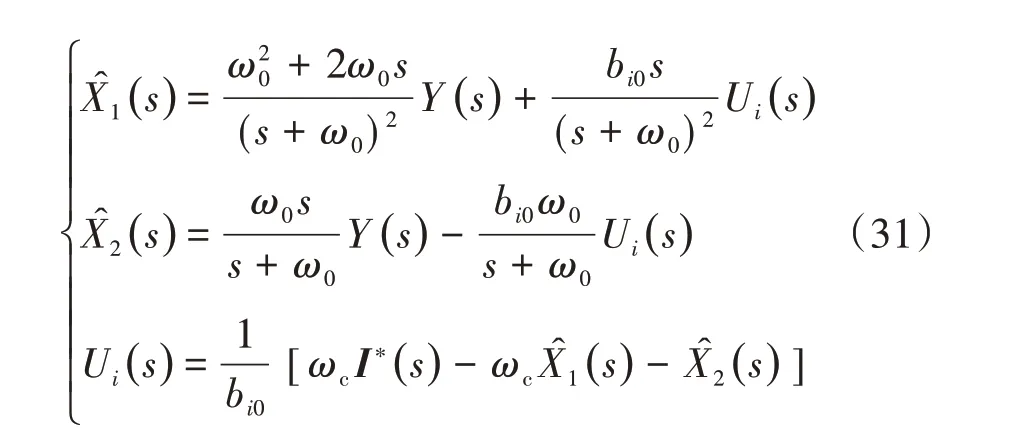
式中:I∗(s)为指令电流i∗的拉普拉斯变换。由式(31)可得:
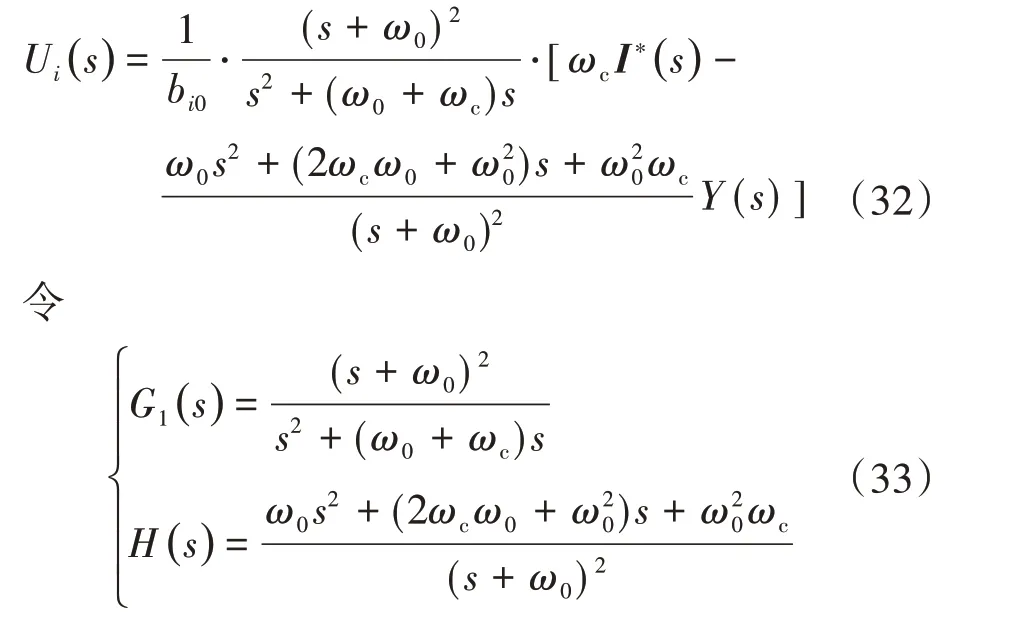
基于改进型LADRC 电流环简化控制系统结构图如图7所示。其中,G(s)为被控对象的传递函数。
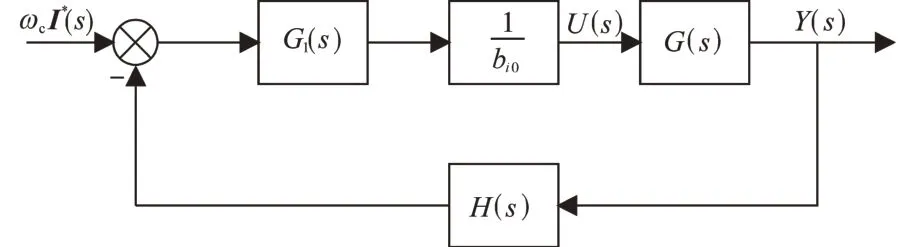
图7 基于改进型LADRC电流内环简化系统结构图Fig.7 Simplified system structure diagram basedon improved LADRC current inner loop
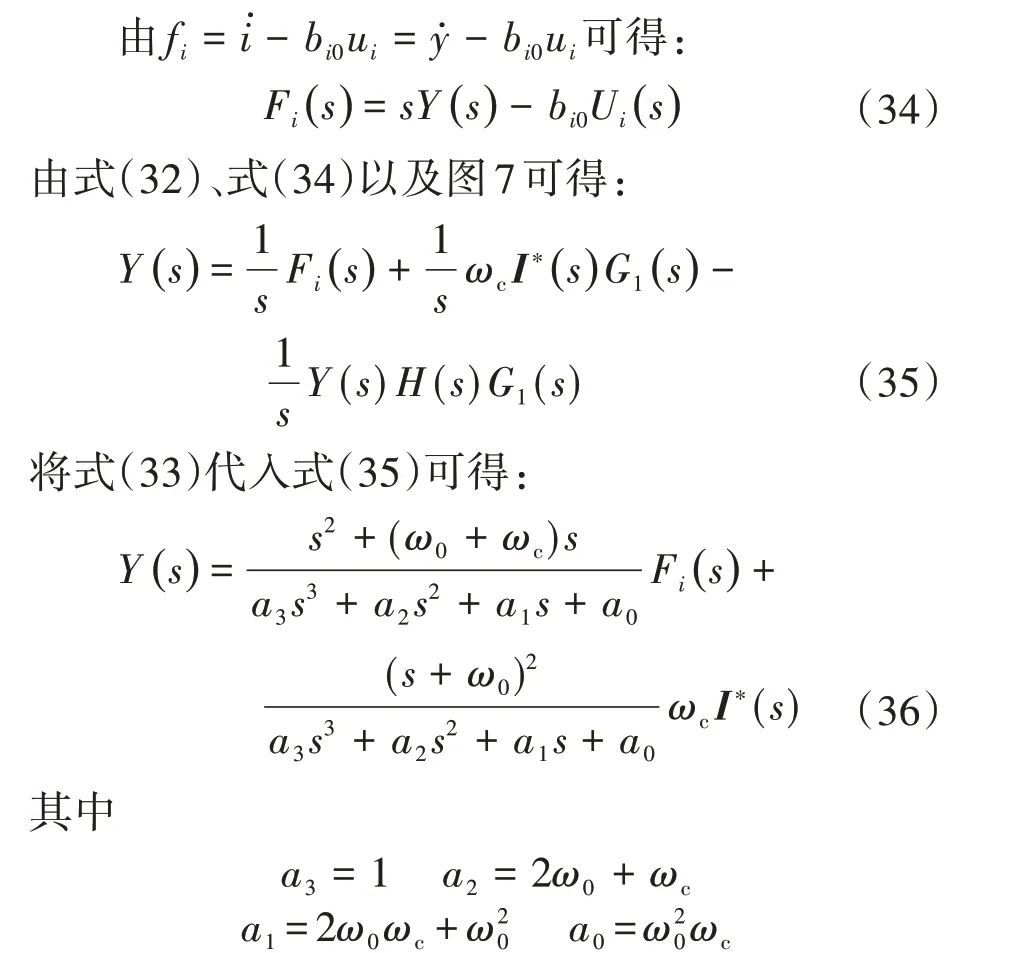
由式(36)可知,扰动项的影响只与ω0和ωc有关。图8 为改进型LADRC 与传统LADRC 扰动项传递函数的伯德图,从图中可以看出,改进型LADRC的系统带宽增加,抗扰能力增强。
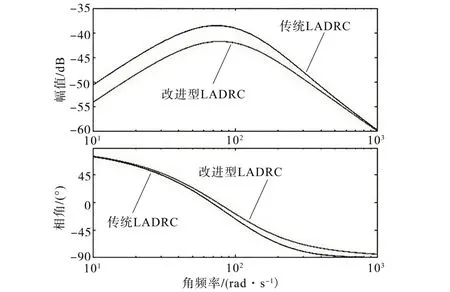
图8 改进型LADRC与传统LADRC扰动项伯德图Fig.8 Improved LADRC and traditional LADRC disturbance item Bode diagram
令ω0= 10,ωc分别取10,20,30 时,可得改进型LADRC 扰动项的伯德图如图9a 所示。令ωc=10,ω0取10,20,30时,则改进型LADRC 扰动项的伯德图如图9b所示。
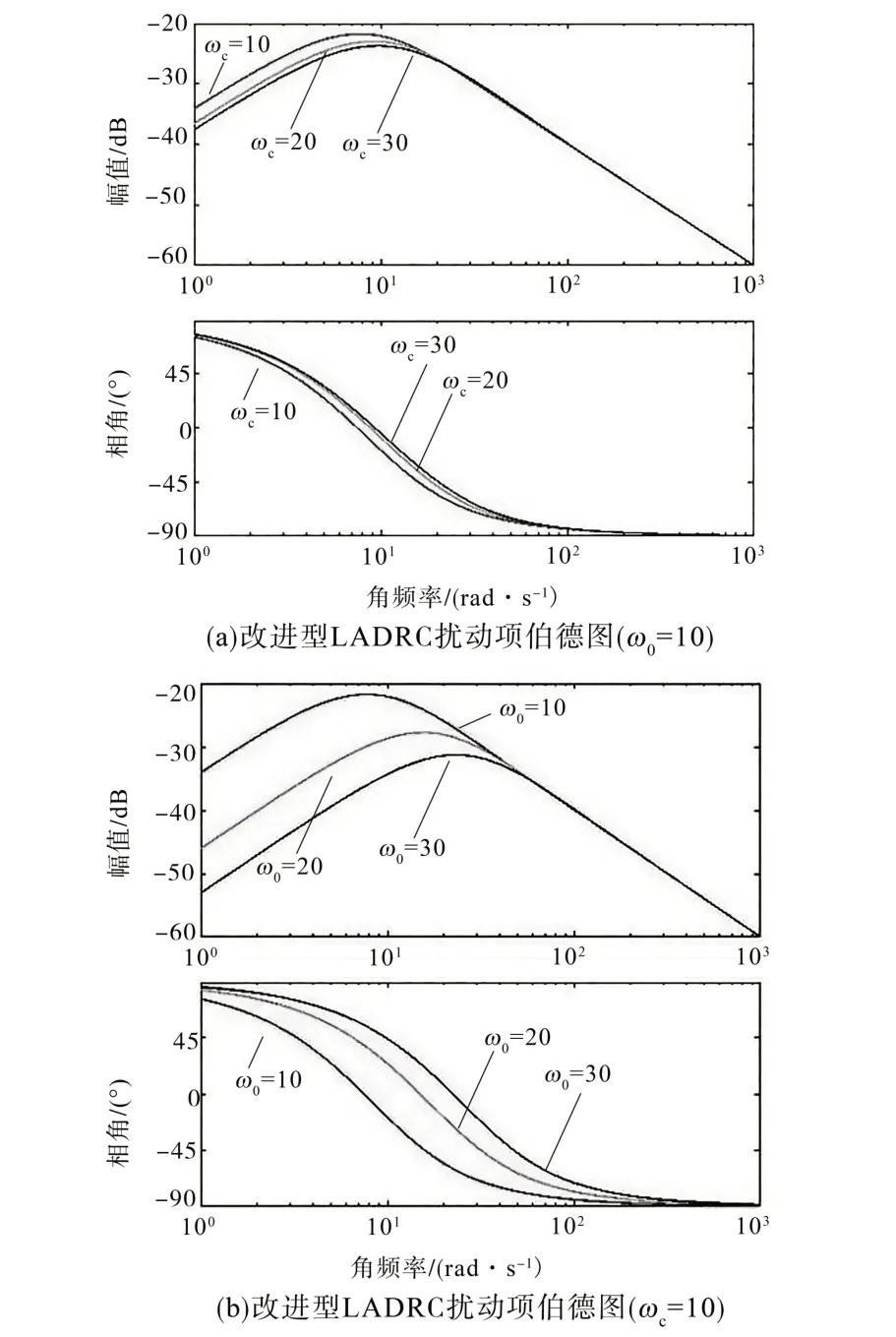
图9 改进型LADRC扰动项伯德图Fig.9 Improved LADRC disturbance item Bode diagram
由图9 可知,增加ω0和ωc都能够增加系统的带宽,使系统抗扰能力增强。通过以上分析可知,改进型LADRC 较传统LADRC 对扰动具有更好的抑制能力。
4 仿真分析
根据图1 所示系统结构图,利用Matlab&Simulink 仿真软件对SAPF 进行仿真分析。三相三线制SAPF系统参数为:线电压有效值380 V,系统频率50 Hz,直流侧电容值2 200 μF,直流侧电压设定值800 V,滤波器输出电感值2 mH。LADRC 控制器参数为:控制器带宽ωc=60,观测器带宽ω0=300,控制增益b0=10 000。
4.1 直流侧稳态电压对比分析
图10 为采用传统LADRC 和改进型LADRC控制器时SAPF 的直流侧电压曲线图,从图中可以看出,采用传统LADRC 控制后PWM 变流器直流侧电压曲线存在着波动,而采用改进型LADRC控制后的直流侧电压曲线无振荡地到达稳态值,从而说明改进型LADRC 控制器对控制SAPF 电压外环的PWM 变流器直流侧稳态电压的效果要优于传统LADRC。
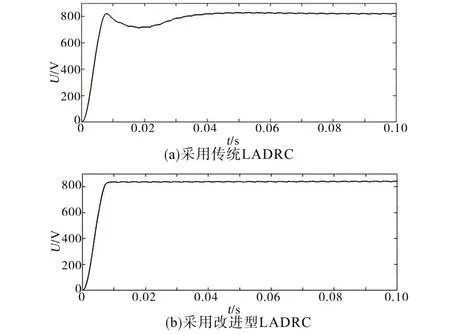
图10 采用不同控制器时SAPF直流侧电压曲线图Fig.10 Voltage curves of SAPF DC side when using different controllers
4.2 跟踪性能对比分析
以系统A相为例,图11为补偿前A相负载电流的波形图和频谱图,此时谐波总畸变率为23.98%。
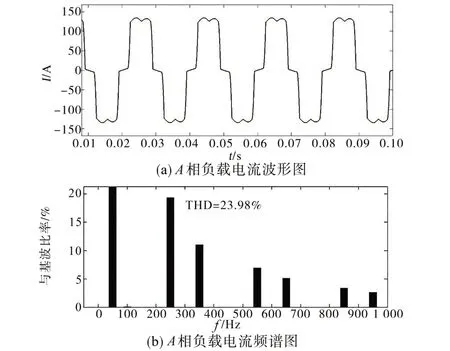
图11 A相负载电流Fig.11 Phase A load current
图12 为采用传统LADRC 与改进型LADRC控制下对谐波的指令电流信号的跟踪效果图。
从图12b 可以看出,在改进型LADRC 控制下,谐波补偿电流能够快速地跟踪指令电流信号的变化,并且跟踪误差近似为零;但采用传统LADRC控制器时,谐波补偿电流的波形与指令电流的波形之间仍存在跟踪误差,如图12a 所示。由此得出,传统LADRC 控制器下SAPF 所输出的补偿电流跟踪指令电流速度比较缓慢,从而验证了改进型LADRC 控制器的动态跟踪性能要优于传统LADRC控制器。
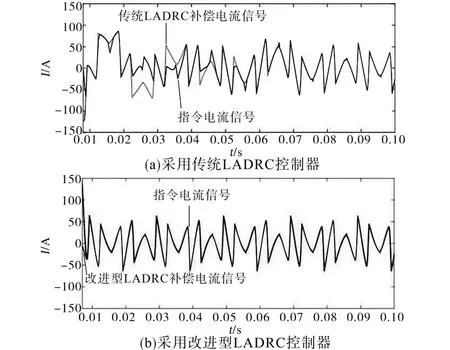
图12 采用不同控制器时A相补偿电流Fig.12 Phase A compensation current when using different controllers
图13 为采用改进型LADRC 控制器补偿后的A相网侧电流的波形图和频谱图。从图中可以看出,采用改进型LADRC 补偿后的A相网侧电流的谐波畸变率为1.55%,远远低于国标。
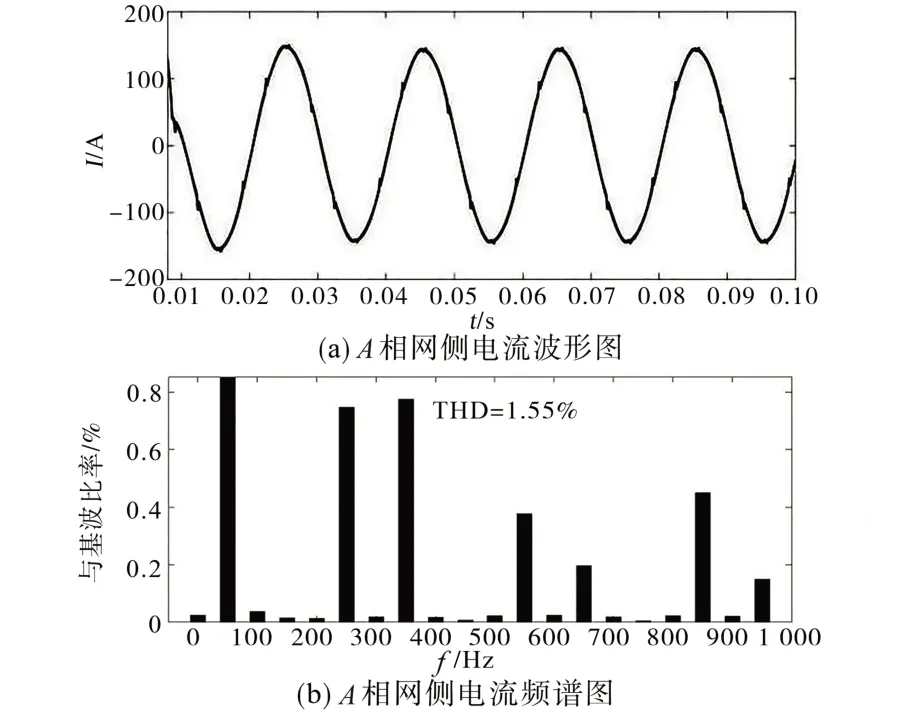
图13 采用改进型LADRC补偿后A相网侧电流Fig.13 Phase A grid side current after using the improved LADRC compensation
4.3 抗扰特性对比分析
为验证改进型LADRC比传统LADRC具有更好的抗扰特性,在系统运行过程中突然增加负载作为扰动。设在t=0.15 s 时,突然增加负载,然后分别用改进型LADRC和传统LADRC控制器去跟踪谐波电流的变化。图14为突然增加负载后的负载侧电流波形图。图15 为分别采用传统LADRC和改进型LADRC 补偿后的A相网侧电流波形图。由图15可以看出,采用改进型LADRC控制的系统在受到外界扰动之后要比采用传统LADRC 控制器恢复到稳态的时间要短,从而验证了改进型LADRC比传统LADRC具有更好的抗扰特性。
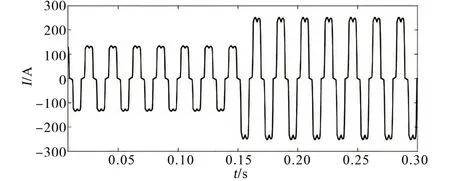
图14 系统增加负载后A相负载侧电流波形图Fig.14 Phase A load side current waveform after the system increases the load
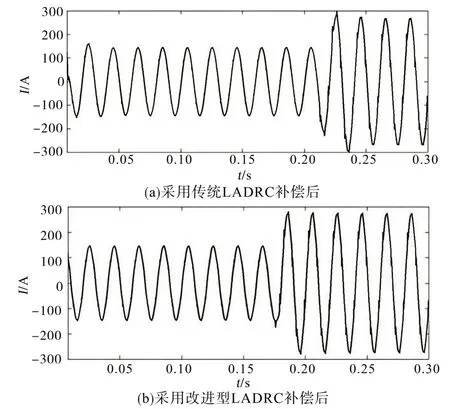
图15 采用不同控制器补偿后A相网侧电流Fig.15 Phase A grid side current after compensation with different controllers
5 结论
为提高三相三线制SAPF 的动态跟踪速度和抗扰动能力,本文提出了一种基于误差控制原理的改进型LADRC,即通过引入新的误差e∗去调节与x2之间的变化。且在系统稳定的前提下,将该改进型LADRC 应用于三线三相制SAPF 的电流内环和电压外环双闭环控制,并在频域中分析了其抗扰特性。最后通过仿真验证了SAPF 在改进型LADRC 的控制下其直流侧电压可以无振荡地达到稳态值,同时系统跟踪指令电流信号的速度快,且相对于传统的LADRC 具有更强的抗扰动能力。该控制器更适合于SAPF 的控制,具有良好的工程应用价值。
