基于北斗通信的水环境监测系统设计
2021-08-30杨泽明刘红旺
杨泽明,刘红旺
(天津水科机电有限公司,天津 301900)
水资源对于人类的生产生活有举足轻重的地位,人类日常生活用水、农业灌溉用水及生产用水等都离不开水资源,展开水环境的检测对水资源的科学配置、合理调度、预警评价有着重大的意义[1]。然而,一些水环境往往地处偏远地区,传统的水资源环境的检测多采用人工抽检的方式,即人工采集水资源样本后在实验室进行检测,此方式成本高,费时费力,且不能做到对水库环境的实时监测,已不能满足目前信息化、智能化的要求。随着人们生活水平的提高,对水质的要求也越来越高。
针对以上问题,同时支持国家智能水网的推广和建设,解决偏远地区、无人区水环境检监测和监测数据的实时传输问题和供电问题,开发一套应用于水环境的基于北斗通信的水环境监测系统,该装置采集所处水资源的环境信息(气象、水文、水质等),可将水环境的各类信息上传到对应的数据后台。
1 系统总体概述
该系统主要有3个部分,分别是:水环境监测传感器部分、数据传输及后台部分、电源储能部分。系统结构见图1所示。
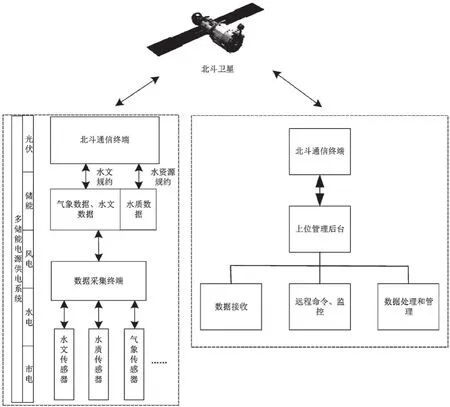
图1 系统结构图
(1)水环境监测传感器部分。运用环境传感器,系统可将当地的气象(温度、风力、风速、风向、蒸发量、降水量、太阳辐射强度)、水文(水位、流速,流量)、水质(总磷、总氮、常规5项,叶绿素、藻类)共19项数据按要求实现自动监测、存储和上传。环境监测传感器系统可以收集装置所处水环境的环境变化以及水资源指标情况。
(2)数据传输及后台部分。负责将传感器收到的环境信息,进行接收、处理并按照MODBUS-RTU标准协议将采集到的数据通过北斗传输给上位数据平台,是整个系统的控制核心。
(3)电源储能部分。本水环境监测装置必须按要求在全天候条件下,长期不间断地工作,所有的设计都应考虑到高可靠性工作的要求。除了设备本身等因素外,可靠的电源是其正常工作的必要条件[2]。
用太阳能电池板浮充蓄电池的供电方式能很好地应用于此采集终端,并根据当时的太阳能辐射数据和耗电,设计计算应配置的蓄电池容量和太阳能电池功率。设计结果应加上较大的安全系数,才能充分保证包括最长可能连阴雨天的长期供电。大量采用单晶硅太阳能电池板,工作稳定可靠。
2 北斗通信
(1)“北斗卫星”系统是我国自行研制、具有完全自主知识产权的区域性卫星导航系统。该系统主要由空间卫星、地面中心站和用户终端3部分组成,具有双向通信、快速定位和精密授时三大功能。覆盖范围包括了中国全境及亚洲大部分地区,具体为5°~55°N、70°~145°E。
(2)北斗卫星通信系统具有短报文收发功能,无需人值守的特点。用户通过短报文可以实现无人值守的水文观测站点的数据传输。
(3)北斗卫星具有高精度、稳定、抗干扰的特性,能有效保证各水文气象站点数据传输的稳定性。
北斗短报文通信模块如图2所示。

图2 北斗短报文通信模块(又称:北斗数传蘑菇头)
北斗短报文通信是“北斗卫星导航系统”的一大特色,即可为用户机与用户机、用户机与地面中心站之间提供每次最多120个汉字或1 680 bit的短报文通信服务[3]。每个用户机都有唯一的一个ID 号,并采用1户1密的加密方式,通信均需经过地面中心站转发。其流程是:
(1)短报文发送方首先将包含接收方ID 号和通信内容的通信申请信号加密后通过卫星转发入站;
(2)地面中心站接收到通信申请信号后,经脱密和再加密后加入持续广播的出站广播电文中,经卫星广播给用户;
(3)接收方用户机接收出站信号,解调解密出站电文,完成一次通信。与定位功能相似,短报文通信的传输时延约0.5 s,通信的最高频度也是1 s/次。一般普通民用北斗数据模块通信的频率为1 min/次。
3 系统设计
3.1 硬件系统(下位采集装置)设计
各类环境传感器(水文、气象、地质等传感器)受单片机指令控制,采集相应的数据上传至单片机,本系统硬件选用的核心控制器为STM32F103ZET6单片机,内核为ARM 32位的Cortex-M3,最高72 MHz工作频率,在存储器的零等待周期访问时可达 1.25 DMips/MHZ(DhrystONe2.1),拥有多达 9 个通信接口,2个I2C接口(支持SMBus/PMBus),3个USART接口(支持ISO7816接口,LIN,IrDA接口和调制解调控制),2个 SPI接口 (18 Mb/s),CAN 接口(2.0B主动),USB 2.0全速接口[4]。硬件系统连接图如图3所示。

图3 硬件系统连接图
各类传感器通过RS485接口与核心控制器串口1(USART1)进行连接,基于Modbus-RTU协议进行通信[5]。在一个扫描周期,控制器逐一完成对传感器的数值获取以及传感器工作状态核查。核心控制器串口2(USART2)通过RS485接口与北斗短报文通信模块相连,将传感器采集到的数据经北斗模块以北斗短报文的方式上传至上位软件,上位软件对采集到的数据进行汇总和处理。
3.2 多电源供电部分设计
下位采集装置要求有可靠的供电系统,不能断电,在全天候条件保证终端设备的用电。由于地形条件限制,用交流供电会有困难。而且目前野外的交流供电仍不稳定可靠,电压变化大,停电较多,如作为电源,还需考虑交流电源的抗干扰、防雷问题。因此,终端基本交流电源作为备选项(留有接入口)。采用太阳能电池板浮充的蓄电池供电系统,终端的设备少,又都是低功耗的,用电量很小,很适合用直流电源这样的供电方式[6]。
本系统采取蓄电池组供电、太阳能电池板浮充方式,这是应用最普遍的工作方式,由可充电电池组、太阳能电池板、充电控制器组成,图4为太阳能充电供电示意图。以太阳能电池板作为充电电源,不受人为因素和外界干扰,遭受雷击的可能性很小,没有运行成本,基本不需要维护,能够长期自动维持测站的供电。绝大部分水文数据采集终端的供电采用这种方式,应用效果良好。

图4 太阳能充电供电示意图
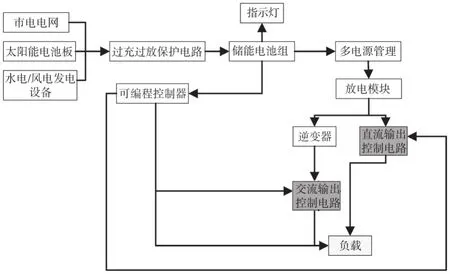
图5 多电源供电部分设计图
太阳能电池板浮充蓄电池的供电方式应用于此采集终端,根据当时的太阳能辐射数据和耗电,设计计算应配置的蓄电池容量和太阳能电池板功率[7]。设计结果应加上较大的安全系数,以便充分保证包括最长可能连阴雨天的长期供电。
3.3 通信模块设计
实时通信模块使用的是北斗卫星导航系统。采用北斗卫星系统,再结合设计的上位软件、数据传输和报文通信协议等技术[8],能保证数据安全可靠和有效实时地传输。浮标平台系统采用的是嵌入式北斗终端机,具有体积小和功耗低等优点,非常适合应用于环境监测系统。
远程上位机与水环境监测装置的通信,采用上位机用北斗通信终端与检测装置点对点连接,实现对监测装置的遥测遥控;其中通信过程中发送和接收数据的流程见图6和图7所示。
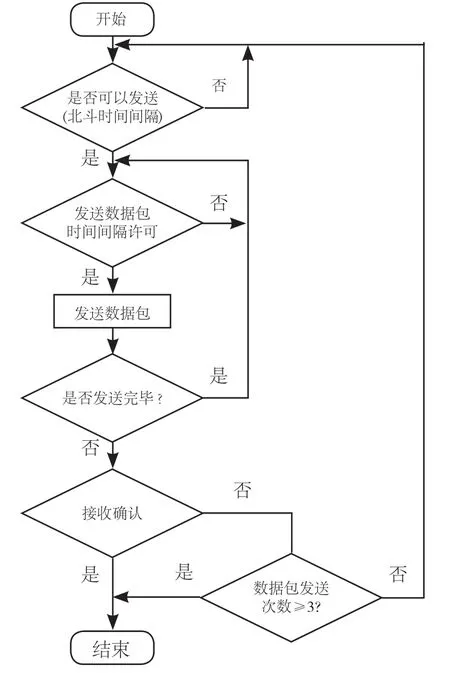
图6 发送流程图
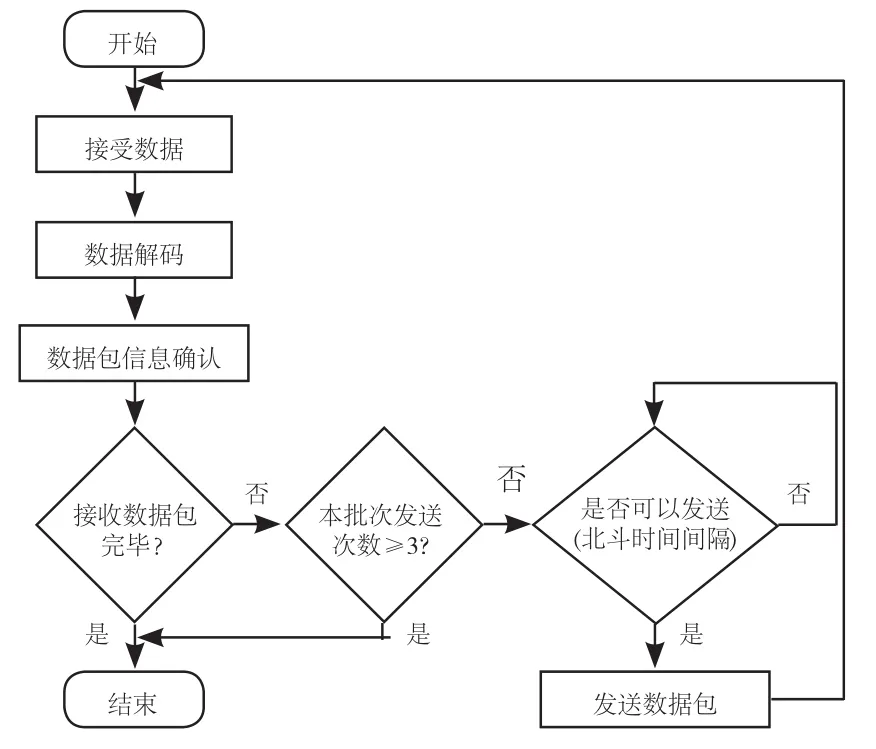
图7 接收流程图
3.4 软件系统(上位)设计
上位软件的功能主要包括: 发送指令、接收数据、审核数据、存储数据、显示实时数据、查询历史数据、管理系统、监控系统等,见图8所示。

图8 上位软件主要功能
本项目所设计的软件结构能够为管理员提供环境信息实时监测与预警、历史数据查询等主要功能。利用VB编程软件进行上位软件编程,MySQL作为数据库,PHP作为服务器脚本解释器搭建后台数据库。在历史数据查询功能中,管理员不仅可以查询环境的历史数据,还可以查询环境参数的同比和环比变化,以使得测量结果可以完整反映变化趋势,帮助用户对水位情况进行分析[9]。
软件系统最重要的2个功能是数据通信和数据存储。数据通信主要完成水环境监测装置发送指令和读取回传数据。数据存储主要完成将回传的水环境数据存入本地数据库。所以,软件系统具有通信和数据库2个接口[10]。除了上述2个主要功能,软件系统设计还具有数据转换及管理和监控系统等功能。数据转换是采用相应的标准对采集的原始数据进行换算,从而获取所需数据结果。系统管理和监控是集中管控和配置整套系统内的所有检测装置,以及对系统运行状态进行监控。本软件留有4G通信接口,可进一步进行开发[11]。软件总体结构图如图9所示,软件系统主界面如图10所示。

图9 软件总体结构图
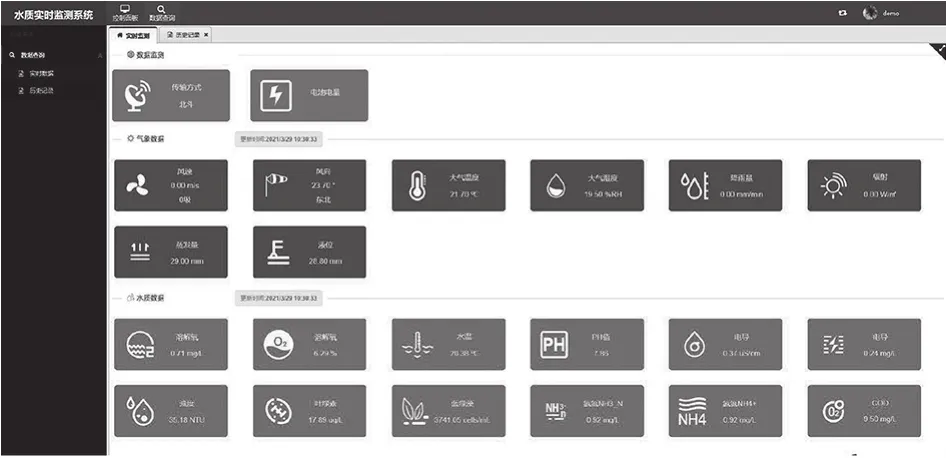
图10 基于北斗通讯的水环境监测系统
4 测试
4.1 雨量数据采集测试
降雨量采集测试采用翻斗式雨量筒[12]。降雨量筒的上盖打开,可看见内部翻斗和与之相连的压力传感器,将雨量筒与上位机连接,轻触翻斗雨量平衡装置使之倾斜来模拟下雨采集雨量,同时用上位机软件对雨量筒进行雨量问询,可以看到上位机软件中有雨量显示,证明此系统可实现预期功能[13]。

图11 翻斗式雨量筒

图12 雨量筒内
图13 软件采集雨量数据
4.2 系统联调测试
按照系统实际使用方式,将整个系统各个部分连接起来。硬件采集系统部分除了没有将太阳能电池板放入标体外,其他均按照整个系统实际使用方式连接,北斗通信蘑菇头伸出实验室窗外接收卫星信号。水环境监测装置放入湖中。本次试验连续运行了30 d,系统设置每3 min自动采集所有传感器数据一次,并通过北斗通信终端传输进行入库,最后通过检验数据库入库的采集数据得到的结果如下:30 d入库数据中,共有5 000多条记录,根据入库数据的采集时间,只发现丢失了3条记录,同时观察入库的采集数据,发现没有奇异的数据点。采集装置和北斗通信终端打捞后检测无故障。
5 结语
文章研究的基于北斗通信的水环境监测系统,为水环境数据传输提供了一种科学、有效的传输方案,同时可以很好地解决偏远地区信号覆盖少、人工采集数据不方便等问题。监测站可实时获取监测装置传回的监测数据,对数据进行处理后提供给数据库和有关应用系统的接口,为水环境观测和相关技术装备的研制提供了有效的科学数据和有力支持。同时伴随着北斗卫星通信技术的快速发展,它在水文气象观测、海域环境监测中的应用有更加广阔的发展前景。
