青岛地铁6号线车辆制动系统设计
2021-08-30李莉
李 莉
(中车青岛四方车辆研究所有限公司 制动事业部,山东 青岛 266031)
传统城市轨道交通项目一般采用“轨旁联锁+轨旁区域控制+车载列车防护+控制中心”的架构,设备配置多,系统接口复杂,故障影响范围大,建设维护成本高,施工调试周期长,互联互通困难。青岛地铁集团有限公司联合中车青岛四方车辆研究所有限公司研究开发了一套以“车—车”通信为基础、以列车为主体和控制核心,具有列车主动进路、列车自主防护、列车自主调整以及无人驾驶(DTO)功能,并支持车辆段和正线一体化的新型列车自主运行系统(TACS)。TACS采用了车载列控子系统与列车控制管理系统(TCMS)、牵引、制动等其他控制系统深度融合的方案。其中车辆制动系统由JK02型制动控制阀、辅助控制单元、基础制动装置、防滑系统等组成,目前已完成了装车试验。
1 制动系统
青岛地铁6号线地铁列车采用4动2拖编组,如图1所示。制动系统作为TACS的重要组成部分,除了需要完成传统城市轨道交通车辆要求的常用制动、快速制动、紧急制动、停放制动等制动系统功能外,还需要完成与车辆网络控制系统融合、与ATO(列车自动驾驶系统)子系统融合的任务。其中与ATO子系统融合是要求ATO子系统集成在电子制动控制单元EBCU设备中,并能够通过EBCU实时获得车辆自身以及车辆牵引系统、制动系统等的状态,为实现ATO子系统精确控制提供更精准的技术条件。图1所示的JK02S_A型制动控制单元集成了ATO子系统[1]。
2 制动系统主要结构
青岛地铁6号线车辆制动系统主要由风源系统、制动控制系统、基础制动装置、防滑系统、空气悬挂供风装置等子系统组成。制动控制系统以转向架为单位进行制动控制,每台转向架可以单独进行常用制动控制和紧急制动控制,融合的车辆网络代替了传统的CAN 总线网络,将列车单元内的全部控制阀连接起来实现整列车的制动力分配。
2.1 风源系统
风源系统主要由无油涡旋式空气压缩机、冷却系统、前置过滤器、干燥器等组成,为制动系统等用风设备提供压缩空气。每列车有2 套风源系统,分别吊装在2辆拖车的底架上。
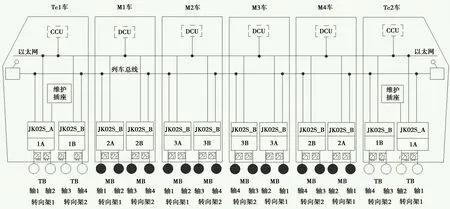
Tc1、Tc2.带司机室的拖车;M1、M2、M3.动车;CCU.中央控制单元;DCU.牵引控制单元;JK02S_A、JK02S_B.制动控制单元;TB.拖车转向架;MB.动车转向架。图1 青岛地铁6号线车辆制动控制系统组成图
2.2 制动控制系统
制动控制系统包括JK02S_A型主控制阀制动控制单元和JK02S_B型辅控制阀制动控制单元。JK02S_B型辅控制阀制动控制单元具备网络通信、制动管理、防滑控制、故障记录等功能。JK02S_A型制动控制单元除了具备JK02S_B型制动控制单元的所有功能,还具备ATO功能和制动系统维护端口。
制动控制单元内的EBCU由EB01通信板、CB01控制板、ATO控制板(JK02S_A型)组成。列车所有制动控制单元通过列车以太网实现载荷、制动百分比、电制动力实际值等信息的共享,按照整列制动力分配的制动计算独立实现本转向架的制动力计算,实现整车的电空混合制动任务。各控制单元均向TCMS传输本转向架制动单元的状态和故障信息,可以通过列车显示屏显示。
JK02S_A型主控制阀制动控制单元实现ATO功能, ATO板卡集成到此EBCU内,ATO可实时获取制动系统与牵引系统的状态信息。该设计实现了ATO与牵引、制动系统的数据实时共享,方便ATO进行实时闭环控制,有利于优化ATO对牵引、电制动及空气制动的控制。当主控制阀的ATO功能失效时,车辆另一端的JK02S_A型制动控制单元成为主控制阀,继续实现ATO功能。
2.3 基础制动装置
基础制动装置采用盘形制动形式,每套盘形制动装置由夹钳、轮装制动盘和闸片组成。每台转向架装有4 套夹钳,其中2 套带停放制动功能,在转向架上呈对角线布置。基础制动装置由制动控制系统控制,产生符合制动指令要求的制动力。
2.4 防滑系统
防滑系统由防滑控制板、防滑阀、测速齿轮及速度传感器等组成,能在充分利用轮轨黏着的前提下有效地防止车轮滑行擦伤。防滑控制板和防滑阀集成在制动控制单元中,防滑控制计算、滑行判断、防滑动作的执行由制动控制单元完成,采用轴控防滑方式。
2.5 空气悬挂供风装置
空气悬挂供风装置包括安装在制动控制单元中的溢流阀和减压阀,还包括安装在转向架上的高度控制阀和差压阀,每台转向架上分左右装有2个高度控制阀和1个差压阀。
3 制动系统主要功能
TCMS将制动指令信号通过以太网发送给各制动控制单元。列车网络正常时,制动系统优先使用网络传送的制动指令;当网络故障时,制动系统根据列车硬线信号根据当前载荷条件施加相应的常用制动;当紧急制动时,各个制动控制单元根据自己的载荷,施加紧急制动。
3.1 常用制动管理
常用制动采用电空混合制动,优先使用电制动,电制动力不足或者失效时,由空气制动补足或者替代,电制动与空气制动实时连续协调配合。
制动控制系统根据空气弹簧提供的载荷压力,在常用制动时对制动力进行计算,制动控制系统将载荷压力值传输至TCMS。各制动控制单元共享列车载荷信息,并且提供给牵引控制系统,牵引控制系统根据制动百分比信息和列车载荷信息计算并施加电制动力,同时将实际电制动力反馈给各制动控制单元。制动控制单元将实际电制动力与列车所需制动力进行比较,如果电制动力能够满足列车制动需求,动车和拖车均不施加空气制动;如果电制动力无法满足列车的制动需求,不足部分用拖车优先原则补充空气制动[2]。
3.2 保持制动施加与缓解功能
保持制动的施加与缓解一方面影响车辆的安全停车,另一方面,在自动驾驶时,对精确停车有很大影响。非自动驾驶模式下,车速小于1 km/h时,制动系统自动施加保持制动。自动驾驶模式下的保持制动施加由信号系统控制,制动系统接收到ATP(列车自动防护系统)发送的“保持制动施加由信号控制”及“保持制动施加”这2个信号后,施加保持制动。基于ATO融合于EBCU的新设计,自动驾驶模式下可以更加快捷准确地实现保持制动完全由信号系统根据站点信息进行控制,进而实现精准安全停车。
网络正常并且处于牵引状态时,TCMS会发出保持制动缓解信号。网络故障牵引状态下,制动系统自行进行车速与指令判断,实施保持制动缓解。
3.3 紧急制动功能
紧急制动采用“得电缓解”方式,贯穿整个列车的连续电源线控制制动系统的缓解,此线路一旦断开,列车编组中的所有车辆会实施紧急制动,全部制动力由空气制动独立承担。列车中各制动控制单元实时采集紧急列车线的状态,并且发送给TCMS。当紧急制动指令发出时,立刻施加紧急制动,此时电制动被自动切除。一旦施加紧急制动,列车停车前不能缓解。
3.4 防滑控制管理
动车的防滑功能由电制动和空气制动共同完成,电制动与空气制动的防滑控制系统独立工作。牵引控制单元DCU 完成电制动防滑的控制,电空混合制动时一旦出现滑行,首先由DCU进行电制动的防滑控制,同时把电制动滑行信号传给制动控制单元,此时空气制动不因电制动力的减小而进一步补充。如果DCU 防滑控制超过某一设定时间仍然滑行,则切除滑行车的电制动,由空气制动的防滑控制来实施防滑功能。
拖车的防滑功能由空气制动独立完成。防滑系统根据速度差或减速度判定滑行程度的大小,通过防滑阀控制制动缸进行保压/排气/充气,以维持/减小/增加作用于该轴上的制动力,避免车轮出现滑行[3]。
3.5 与ATO的融合功能
制动系统实现了ATO 与BCU 的深度融合,将ATO 功能集成至车辆制动系统EBCU 中。ATO通过与制动系统的直接通信,获取列车载重信息、牵引系统状态、制动系统状态,根据计算的列车速度,生成ATO 曲线,并据此控制列车运行。从而避免了因多节点设备中部分故障导致的制动力不足(包括电制动力、空气制动力),以及因轨道湿滑引起的列车滑行等情况下外部设备给ATO 控制带来的不利影响。同时,ATO 可根据当前整车的载荷、制动力需求、电制动能力等信息,更加合理地分配电制动与空气制动,充分利用制动级位,尽可能保证列车高速段不使用空气制动,实现真正的绿色停车。与此同时,ATO 与制动功能的融合实现了信号系统与制动、牵引系统的信息共享,信号系统将轮径校准应答器信息发送给制动系统,制动系统利用此信息可以更加准确地实现轮径校核,该功能有助于更精准地进行制动管理和防滑控制。
4 创新项点
青岛地铁6号线采用列车自主运行系统(TACS),与传统城市轨道交通项目相比具有多个创新点。例如:以列车之间数据通信为基础,以车载控制为核心;车载控制系统深度融合;智能化驾驶控制;车辆段设备与行车控制等。制动系统与之相适应,做出了一些创新设计。
4.1 网络升级
网络拓扑结构与传统架控制动系统不同,如图2所示,传统模式的制动控制系统组建独立的CAN网络进行制动计算,实现制动力分配;而TACS利用整车的以太网资源组建制动网,制动系统作为节点加入整车的以太网。该设计一方面提高了信息的传递速度,同时可以大幅增加传递的信息量,实现了TACS要求的融合设计。
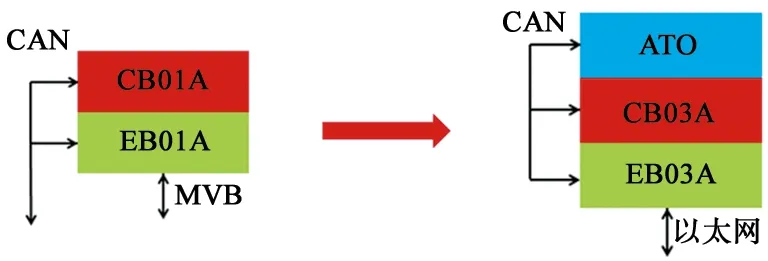
图2 制动控制系统网络升级示意图
4.2 ATO功能
传统城市轨道交通的ATO是一个相对独立的设备,TACS实现了制动系统融合ATO的功能。基于ATO与制动系统共享相同的速度信号源,并且可以直接共享信号系统的控车信号,制动系统可以获取更多的制动性能数据,所以使制动系统减少了惰行时间,提高了行车效率,另一方面控车也更加精确。
ATO融合使制动系统增加了跳跃模式,制动系统收到跳跃模式指令会自动施加最大常用制动20%的保持制动力,可以配合ATO实现车辆站停调节。增加的另一个模式是自动洗车模式,在该模式下,ATP向TCMS发送自动洗车标志与洗车牵引/制动命令,由TCMS统一向牵引/制动系统发送指令。接近洗车终点时,由TCMS转发信号系统的洗车制动命令,制动系统施加最大常用制动实现停车,完成自动洗车。
4.3 轮径校准升级
列车出库,通过轮径校正区域时,制动控制系统开始进行轮径校准(图3)。制动控制系统接收到轮径校准应答器1的信号后,对基准轴速度传感器的脉冲信号开始计数,接收到轮径校准应答器2的信号后,停止对基准轴速度传感器的脉冲信号计数。经过轮径校准区域脉冲计数为N,速度齿盘齿数为n,轮径校准区域两个轮径校准应答器之间的距离为S,则基准轴轮径值D为:D=S×n/(N×π)。由此可以实现自动轮径较准。

图3 轮径校准示意图
5 结束语
该项目的实施有利于提高城轨制动产品的设计水平,丰富城轨车辆架控制动系统产品的多样性,提升制动系统国产化的竞争力。目前该制动系统已完成所有的例行试验和型式试验,并且完成了装车前的各项调试,均满足装车要求。青岛地铁6号线作为列车自主运行系统(TACS)的示范工程,制动系统有大幅创新改进,制动控制能力更为精准,车辆运行更加安全、可靠。
