基于多尺度网络的绝缘子自曝状态智能认知方法研究*
2021-08-29吴立刚范叶平杨德胜
万 涛 ,吴立刚 ,陆 烨 ,王 浩 ,张 潇 ,范叶平 ,杨德胜
(1.国网信息通信产业集团安徽继远软件有限公司,安徽 合肥 230088;2.国网江苏省电力公司徐州供电分公司,江苏 徐州 221005)
0 引言
绝缘子作为输电电路中的重要器件,被安装在非等电位或导体与接地器件之间,其自爆与否会严重影响输电线路的安全[1-3]。现代输电线路运维检修机制通常基于直升机或无人机按照预定轨迹拍摄的视频,由人对每帧图像进行自爆绝缘子位置辨识。然而,人的主观因素,以及运维成本和复杂环境的客观因素,使得现代输电线路运维检修模式费时耗力。因此,亟待研究绝缘子自曝状态的智能认知方法。
目前学术界对绝缘子自爆状态的识别进行了大量研究[4-5]。然而,识别方法多基于理想条件,面对复杂野外图像时难以获取绝缘子状态的自曝特征,识别性能难以满足实际需求[6-8]。
人工巡检从人工智能[9-10]角度可归结为:人根据丰富的历史经验评判当前绝缘子状态。然而,这种主观估量模式易受不同人员经验、不确定干扰等因素影响,鲁棒性差。传统认知系统具有开环属性,针对输入的不确定对象,其恒定的特征提取和分类准则输出不确定的决策,无法模仿人类思维模式。随着神经网络算法的改进,深度学习受到了广泛关注[11-12]。ResNet 作为一个流行的网络结构,将原始输入信息直接传输到后续层,在生成泛化特征的同时,加快超深层网络的训练,然而,ResNet依然属于开环认知系统。
不同规模的网络提取不同尺度的特征融合后将改善整个网络性能[13]。然而,当前的深度学习缺乏有效的方法提取多尺度特征提高图像的语义理解。因此,为了应对如上挑战,本文给出了一种基于多尺度卷积网络的绝缘子状态反馈认知方法。首先,面向定位归一化预处理后的绝缘子图像,基于ResNet-18 增加不同结构的网络分支提高网络适应不同分辨率的能力,同时在网络末端,融合多尺度信息。其次,在面对绝缘子状态的多个尺度特征时,为了避免softmax 逼近能力不足,随机配置网络(Stochastic Configuration Networks,SCN)[14]可构建泛化的自曝状态分类认知准则。最后,为了评测自曝状态分类认知结果的可信度,基于定义的误差指标自调节多尺度网络架构,重构不确定认知结果约束下的特征向量和分类认知准则,以进行自曝状态再认知。实验结果显示,本文提出的智能认知方法与其他方法相比,增强了模型的泛化能力和认知精度。
1 基于多尺度神经网络的绝缘子自曝状态智能认知模型
本文提出的基于多尺度网络的绝缘子自曝状态智能认知方法的结构图如图1 所示。

图1 基于多尺度网络的绝缘子自曝状态智能认知模型
训练层基于ResNet-18的网络结构,通过添加不同分辨率的分支和网络末端的多尺度特征提取,构建多尺度结构卷积模型。并基于反馈层评测指标下达的网络深度,增加卷积层建立更深层次特征空间的数据结构。测试绝缘子图像亦可获取特定深度条件下的自曝状态认知结果。
反馈层仿人思维交互模式,通过定义误差指标实时评测认知结果的可信度,若不满足阈值指标,则自寻优调节网络深度,构建可信度不足测试样本的优化特征和分类认知准则,再认知自曝状态。
2 图像预处理
2.1 图像旋转
航拍中会时常遭遇气流,或由于轨迹变化位于不同方位。为了增强模型的鲁棒性,首先对训练集的图像进行±5°、±10°和镜像旋转,扩充样本集合,如图2 所示。
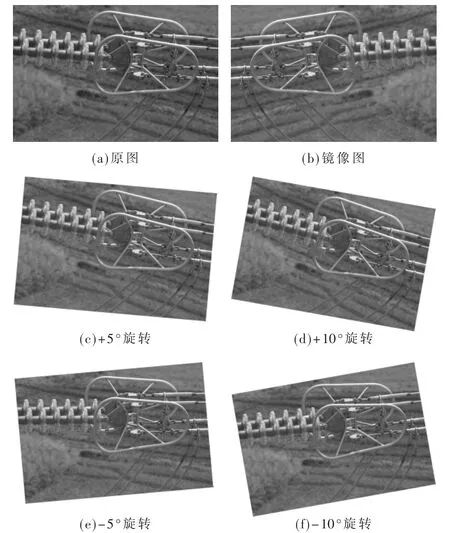
图2 图像预处理
2.2 绝缘子串定位
在航拍的线路巡检图像中绝缘子具有多种位姿,因此需要首先对其进行定位。图3 给出了采用YOLO 目标检测的定位效果。

图3 基于YOLO 算法的航拍绝缘子定位
2.3 绝缘子图像归一化
选取定位分割后的绝缘子串图像的较短边,将其定为299,较长边随较短边等比例归一化,归一化的绝缘子图像大小设定为299×299。
3 多分辨率多尺度架构ResNet 网络
本文构建了如图4 所示的多分辨率多尺度结构的ResNet 网络(Multi-Resolution And Multi-Scale ResNet,MRMSRN)。

图4 多分辨率多尺度架构ResNet 网络流程图
3.1 多分支网络架构
每个输出通道对应一个滤波器,共享参数的相同滤波器仅能提取一种类型特征送至输出通道。卷积层增加输出通道数量的代价是计算量剧增和过度拟合。在本研究中,借鉴NIN[15]的思想,将非对称稀疏连接架构添加至ResNet的结构中,获取不同分辨率下的深度特征信息。
3.2 多尺度特征融合
原始ResNet 网络基于单尺度决策层描述获取识别结果。然而,单一尺度无法确保认知所需的充分信息量。因此,针对上述多分支网络中提取的大小为7×7的特征图输出,首先将其合并为8M×7×7的特征图集合,然后采用7×7 和4×4的平均池化转换为两个不同尺度的特征向量,最终连接构建为40M的全连接特征向量,输入后续模式分类器在多尺度条件下寻求绝缘子图像状态的最佳决策。
3.3 随机配置网络
近年来随着随机算法的涌现,多层感知机的构建过程首先是预设一个参数区间,在此区间内以平均概率的方式生成感知机中输入层和隐含层所需的随机权参数,采用最小二乘法计算伪逆的方式求取隐含层和输出层之间的权值。
设Fc={Fc1,Fc2,…,FcZ}是具有多分辨率多尺度的全连接特征向量,Z 是样本个数。SCN 可等效为如下网络:

其 中,β=[β1,β2,…,βL]是输出 层的权 值;φj和bj是在预设区间内随机赋值的输入权值和隐含偏移;φj,bj∈[-λ,λ],k(·)是sigmoid 函数;L 是隐含层节点个数。
3.4 深层神经网络参数调节
深层神经网络需要迭代参数,优化策略如下:
(1)前向传播中,基于MRMSRN 模型,面向输入绝缘子图像集,提取多分辨率多尺度特征。基于式(1)逐渐增加SCN的隐含层节点数,直至满足最大个数或误差域值约束,获取绝缘子自曝状态的认知结果;
(2)若误差域值未满足,且隐含层节点数已满足约束,则基于SCN的输出误差反向更新MRMSRN的参数;
(3)交替重复步骤(1)和(2),直至误差不再改变,输出最终认知结果。
4 绝缘子自曝状态智能认知机制
在获取测试绝缘子图像的自曝状态认知结果后,需要构建性能指标实时评测绝缘子状态不确定认知结果的可信度,为多分辨率多尺度特征空间的自寻优调节和分类认知准则重构提供依据,仿人进行自曝状态再认知。
4.1 认知结果的误差指标
在第ω 次认知中,面对测试绝缘子图像集U,Ui∈U,i∈[1,Z],网络深度N 所生成的全连接特征向量Fci,N,ω的不确定自曝状态认知结果为Ti,N,ω∈[1,nc],其中nc为自曝状 态类别标签。潜在语 义分析 可以抽 象Fci,N,ω至压缩语义向量fci,N,ω=[fci,N,ω,1,…,fci,N,ω,s],s=40M。设 与fci,N,ω具有相同类别训练集的语义向量矩阵为fcTi,N,ω,则同类别 误差矩 阵Di,N,ω定义为:

其中,Zi,N,ω表示与Ui具有一致状态的训练样本个数。同理可定义不同类别误差矩阵,则Ui的认知结果误差定义如下:

其中,熵值越大表示认知结果可信度越低,需要增加网络深度以再认知状态,反之亦然。
4.2 基于不确定认知结果误差熵的状态反馈调节机制
为了模仿人类反复推敲比对信息交互认知模式,借鉴马尔科夫决策过程[16]可定义性能指标J:

其 中,Ri,N,ω/dω表示测试图像在第ω 次反馈认知过程中基于深度N的得分,d(d<1)是代价因子。特别地,表示初始卷积深度的得分。
5 实验结果
5.1 实验数据
从无人机的巡检航拍中选取包含绝缘子的7 000 幅图像,训练集与测试集的比例为8:2,每幅图像的尺寸为4 288×2 848。MRMSRN 中卷积深度的最大值Nmax=6,M=32,训练数据重复的轮数为100。SCN 中φj和bj的取值范围λ 为{0.5,1,5,10,30,50,100},,L的最大值设为1 000。由于SCN的参数设定具有随机性,采用运行10 次取最优结果的方式获取最佳参数组合。
5.2 实验结果分析
当网络深度N=1 时,图5 给出了SCN 中采用不同隐含层节点个数L 条件下,训练绝缘子图像的自曝状态识别精度曲线。随着L 个数的递增,自曝状态的识别精度奕随之增加;当L 超过20 后,识别精度呈现稳定收敛,这一情形表明由于在SCN 中不同参数的随机基函数引入,使得输入多分辨率多尺度特征与输出自曝状态之间建立了有明确映射关系的非线性关系。

图5 不同L的SCN 检测精度比较
如图6 所示,不同的网络深度条件下,随着L 个数的增加,检测精度均呈现单调递增快速收敛趋势。此外,网络深度的增大使得绝缘子状态的检测精度先递增后稍微降低。当网络达到一定深度时,可能会引入冗余信息致使性能饱和下降。初始网络深度为ResNet-18 时,即无反馈认知系统,此时约有90%的正确输出,剩余10%的测试样本,通过反馈调节机制重构SCN 后,约2%的样本正确输出。

图6 不同网络深度条件下的自曝状态识别精度曲线
本文算法与其他算法的检测结果进行了比较,包括带反馈环节的ResNet-42、ResNet-18 和标准ResNet-18,以及Inception-v3 和VGG 16。表1 给出了500 次实验的平均检测精度和每幅图像的平均测试时间,所给出的实验数据形式均采用均值±标准差。从表1 可以明显看出,本文方法的平均检测精度为92.86%,较基于反馈架构的其他模型提高了2%~3%,较基于无反馈架构的其他模型提高了5%~13%。

表1 不同深度学习模型的识别精度和训练时间比较
此外,为了表征SCN 对输入输出之间非线性关系的万局逼近能力,本文以相同的绝缘子图像作为输入,特征提取方法一致,分别采用softmax、RVFL、SVM 和KNN 模式分类器对自曝状态进行识别。从表2 可以看出,SCN较其他分类器具有更好的性能。主要原因是SCN在确保学习模型万局逼近能力的约束条件下,生成新的随机基函数,使得随机参数设置方法与建模数据关联。

表2 不同模式分类器的识别精度和测试时间比较
6 结论
本文探讨了一种基于多尺度卷积神经网络的绝缘子状态反馈认知方法的可行性和有效性。首先,基于改进的ResNet 提取绝缘子图像多分辨率多尺度特征。然后,基于结构自生成的SCN 模式分类器,在输入特征与输出自曝状态之间建立强泛化的非线性映射关系。最后,仿人思维模式构造误差指标,评测自曝状态认知结果的可信度,构建调节机制更新特征空间并重构分类准则,反馈再认知绝缘子状态。实验结果表明了本文方法的可行性和有效性。
航拍的图像中可能存在大量未知噪声,为了增强绝缘子自曝状态的检测精度,图像去噪将是下一步的研究重点。