基于VR技术的电梯电控系统装调实训装置的研究和设计
2021-08-28刘锦江
刘锦江 李 力
(湖南工业职业技术学院,湖南 长沙 410208)
1 引言
《国家职业教育改革实施方案》提出了“三教”改革的任务,其中,教法是实现“三教”改革的根本途径[1],而教学设备的革新是教法改革的重要保障。随着高层建筑越来越多,电梯的安装和使用量也急剧增加,电梯行业的蓬勃发展也造成了对相关安装、调试和维护的人员需求的增加,不少职业院校和培训机构都开设了相关的课程,其中,电梯的电控系统的安装、调试和维修维护技能的培训是必不可少的一个部分,因此,非常有必要对电梯电气控制系统的安装调试及维修维护相关技能的实训教学设备进行技术革新,以适应“三教”改革的需求。
2 系统组成
目前,职业院校或者机构的相关技能培训一般采用按一定比例缩小的机械模型和电控系统组合的方式进行,即采用模型教学,但由于技能实训教学过程中,实训设备的使用频率高,同时由于是初级学员,实训设备受损的情况十分常见,这不但增加的教学成本,也影响到了教学效率,更不利于新教法的实施[2,3]。
根据在长期实训教学过程中积累的经验,设计了一种电梯电控系统半实物仿真实训装置,装置采用虚拟现实技术,虚拟与实物相结合,电气控制柜采用真实的电梯控制系统(包括主控制器、变频器等电路结构),而电梯机械部分(包括轿厢、层门装置、井道、对重块、限速器、轨道等)则采用计算机虚拟现实技术来实现。
本装置主要用于电梯电气控制系统的安装、调试和故障检修训练,目前市场上电梯控制系统种类繁多,培训单位不可能购买到所有种类的电梯来供学员进行各类操作培训[4,5],因此本系统采用固定组件和可替换组件的结构,固定组件包括电梯控制按钮面板、曳引电机、门机电机、转速传感器、下位机、计算机主机、大屏幕显示器,可替换组件为电梯电气控制柜,若要进行某一型号的电梯电气系统的训练,只需将电梯电气控制柜替换成该型号电梯的控制柜,并在虚拟仿真系统中调用该型电梯的三维模型即可提供该型号电梯的模拟培训环境。
该装置由电梯电气控制柜、电梯控制按钮模块、电机运动模块、数据交换模块、仿真模块、显示和语音模块组成,系统构成如图1所示,装置的布置如图2所示。本装置中,电梯电气控制柜是电梯电气控制系统安装、调试、维修等技能的操作对象,因此,电梯电气控制柜采用实物形式的真实部件,电机运动模块包括曳引电机和门机电机,为降低能耗以及教学场所的噪音,均采用小功率同类型电动机替代,且在替代电机上安装有转速传感器,将电机运动信号采集至虚拟仿真环境[6]。

图1 系统组成结构图

图2 系统布置示意图
数据交换模块以单片机控制器为核心,包括数据采集和转换电路,将转速传感器测量得到的各电动机的转速数据发送至仿真模块,并将电梯三维模型中各虚拟行程开关和到位开关的状态信息通过数据交换模块反馈至电梯电气控制柜中(图3)。

图3 数据交换模块结构图
仿真模块主要由高性能计算机组成,用于运行虚拟仿真软件,显示和语音模块可由大屏幕电视机和音响设备组成,用于画面和声音的输出。
虚拟仿真软件包括虚拟驱动模块和电梯三维模型,电梯三维模型包括电梯井道、轿厢机构、虚拟电机、限速器、对重块、缓冲器、层门装置、电梯轨道、照明装置、换气装置,以及虚拟行程开关和到位开关等。在虚拟环境中,虚拟电梯具有楼层显示、运行状态显示、照明等辅助功能,界面设置有视角转换按钮,可选择显示井道、轿厢内、楼层电梯口等视角,有利于学员对整个电梯部件运行状态进行学习。
3 系统工作过程
学员的训练对象是电梯电气控制系统,教师可根据不同的培训目标设置任务,如电梯电气控制系统的安装、软硬件调试、故障检修训练,学员完成训练任务后,将电梯电气控制柜接入系统中,打开上位机中的虚拟仿真系统软件,连接下位机并调用该型电梯的三维模型,系统进入仿真运行状态(图4)。

图4 系统工作流程
如电梯电气控制柜软硬件系统都无故障,则当外呼梯按钮得到指令后,电梯控制柜的控制器通过柜内的门机变频器控制门机电机运转,转速传感器测得电机转速并通过下位机将该转速传送至上位机,虚拟仿真软件根据所得转速成比例驱动虚拟环境下的三维电梯门模型水平运动,当电梯门三维模型打开后,设立于虚拟环境中的虚拟开门到位开关将开门到位信号通过下位机反馈至电梯控制柜的控制器,控制器控制门电机停止运行。
当内呼梯按钮得到楼层指令后,电梯控制柜的控制器通过柜内的曳引变频器控制曳引电机运转,转速传感器测得电机转速并通过下位机将该转速传送至上位机,虚拟仿真软件根据所得转速成比例驱动虚拟环境下的三维电梯轿厢模型垂向运动,虚拟环境中的虚拟楼层行程开关将电梯轿厢位置信息通过下位机传递给电梯控制柜的控制器,控制器根据先前写入的控制程序调节曳引电机的运转,直到到达目的楼层。
4 实训教学设计
本装置可完成电梯电气控制系统相关技能实训,如对电梯电气控制系统的运行参数进行初始设置、调试、各工况运行试验,轿厢起动、加速、减速、平层准确度试验、开关门时间实验,同样可以完成电梯控制器程序编写、调试训练及电气控制系统常见故障排除训练等[7]。本装置的优点在于在保证电气控制系统真实的同时还能将电梯的各执行机构的运动形象化,通过虚拟场景观察到电梯的运行,这对于初学者来说是十分必要也是十分有帮助的。
在对电梯电气控制系统相关技能实训教学设备进行半实物半虚拟改进的基础上,对教学方法也进行改进,对传统的课堂模式进行突破,将课堂交还给学生,基于行动导向教学法,提出以学生自主学习为主线、教师转变为课堂主持人的实训教学方法,教学实施过程如图5所示。
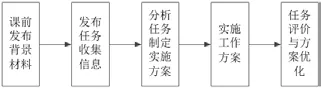
图5 教学实施过程
在教学过程中,教师不再是知识的灌输者,而是学习流程的引导者和学习过程的监督者。以电梯电气控制系统故障检修实训为例,教师在课前发布相关背景材料,学生根据背景材料对电梯电气控制系统故障检修进行初步学习,然后教师发布具体任务书,学生根据任务书完成知识和技能的准备,并通过小组讨论制定具体检修方案,教师组织学生对方案进行讨论、完善,确认可行后即实施,此过程中,教师需密切关注学生的实施进度,及时纠正错误,最后进行任务的评价和对检修方案进行回头看,提出改进,从而获得技能的提升。
5 结语
本文提出了一种兼顾教学效果和资源投入的电梯电气安装调试和故障检修的半虚拟仿真训练装置,将计算机虚拟现实技术用于实训教学中,而作为技能训练对象的电气控制柜则采用真实设备,以虚实结合的方式解决实训教学中存在的设备成本、教学场所、资源消耗等问题,为“三教”改革提供基础保障,本装置已获得国家发明专利授权(专利号:201510562575.7 )。
