一种基于预估算法的电磁阀电流闭环控制及仿真
2021-08-28王建军
王建军,杨 佳,李 睿
(陕西法士特汽车传动工程研究院智能传动研究所,陕西 西安 710077)
引言
现代汽车电控中,各种气动元件种类繁多,需要用电磁阀对气动元件进行控制,电磁阀的控制效果直接影响了气动元件的执行效果,从而影响汽车的使用效果。
本文提出了一种基于预估算法的电磁阀电流闭环PID 控制方法,通过软件和硬件相结合,优化了传统电磁阀电流闭环PID 控制,可以有效提高系统动态响应并且自动适应控制对象本身电参数的变化。
1 传统电磁阀电流闭环PID 控制分析
1.1 传统电磁阀电流闭环PID 控制结构
传统电磁阀电流PID 闭环控制结构如图1 所示。PID 控制器以输入的目标控制电流数值和实际电流反馈值的误差为输入,通过PID 算法计算输出控制所需的PWM 占空比,再通过硬件驱动电路去驱动电磁比例阀。
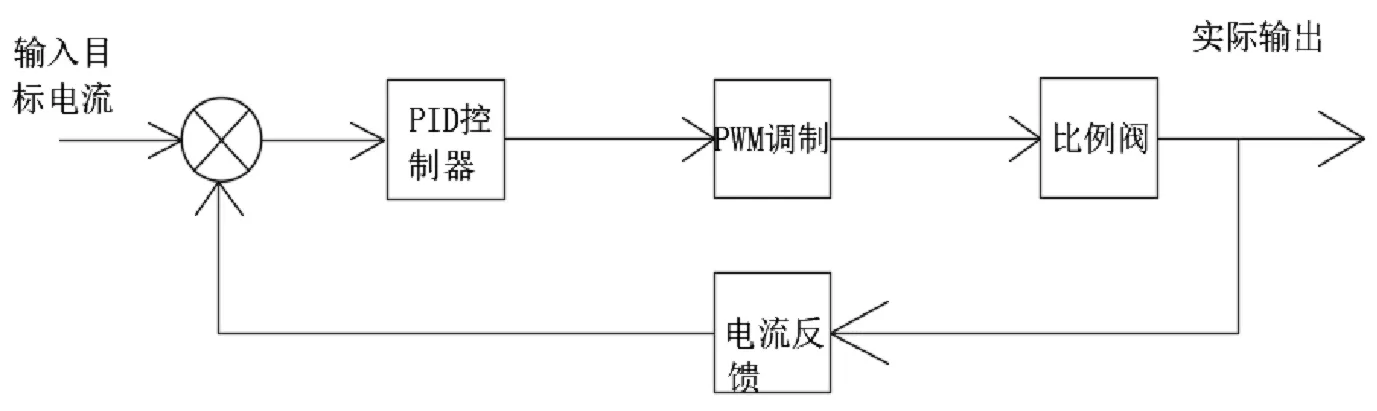
图1 电磁阀电流PID 闭环控制结构
1.2 传统电磁阀电流闭环PID 控制分析
传统电磁阀电流闭环控制在车辆控制应用中存在局限性。
首先,电流PID 闭环控制过程中,实际电流响应如图2所示,系统存在t0~t1 振荡收敛过程,这个收敛过程是PID控制无法回避的[1]。

图2 PID 闭环响应
其次,在汽车行业,由于车辆数量多,电磁阀控制对象自身参数的离散性比较大,参数的离散性足以影响控制效果。
再次,车辆上的电磁阀属于一个时变系统,阀的直流内阻会随着环境温度的变化而变化,这些变化将直接影响控制动态响应。
2 基于预估算法电磁阀电流闭环控制
2.1 系统原理
如图3 所示。在线监控部分为硬件电路实现,完成电磁阀直流内阻采样。PID 估算部分为软件实现,根据在线测试的电磁阀直流内阻,结合控制目标和其他电参数,完成对PID初始输出的预估计算,避免直接使用PID 控制引起系统的振荡和收敛,影响系统动态响应。

图3 基于预估算法电磁阀变流闭环控制结构
2.2 硬件设计原理
硬件设计如图4 所示。电磁阀由电阻R14、电感L1 串联等效。电阻R14、R7、R8、R17 组成电桥,对电磁阀内阻进行测量。U4 和U5 组成隔离运放,对采集信号进行放大和滤波。U2 为电源隔离模块,为在线测试电路部分提供一个与控制系统完全隔离的电源。Q1 三极管,Q2 功率MOS 管,与电阻R1、R2、R11、R6 电阻网络组成比例阀的PWM 驱动电路,完成电磁阀的PWM 调制驱动。U3 为电磁阀实际电流采集芯片。U1 为MCU,MCU 完成预估算法和PID 控制算法,完成对电磁阀的控制。
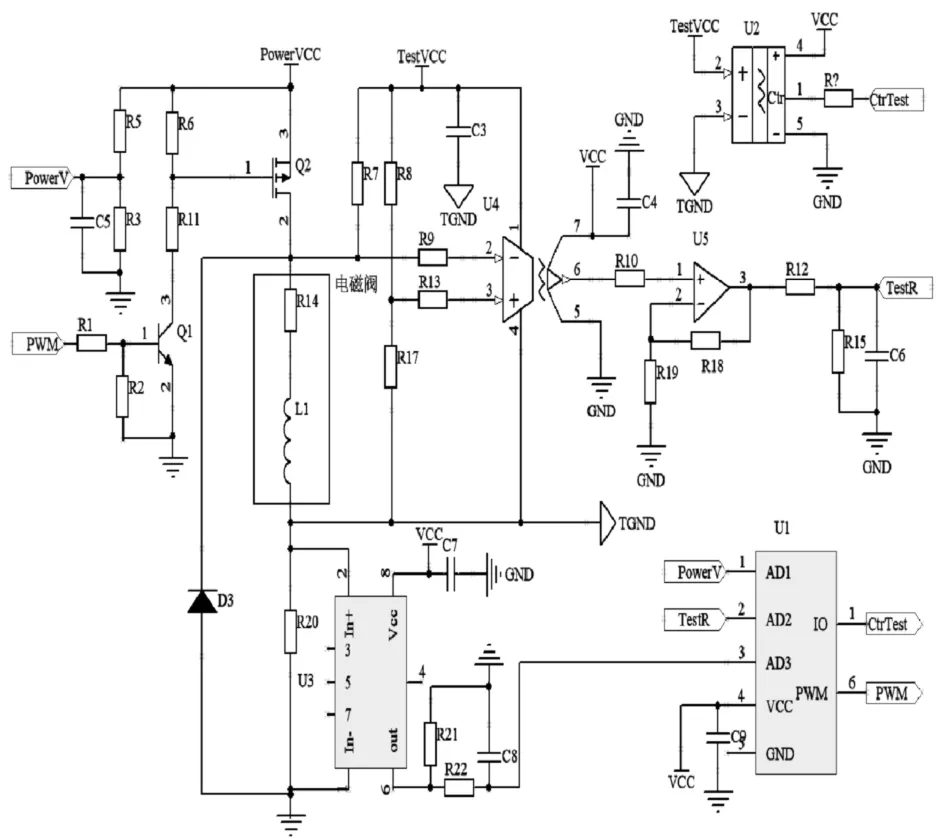
图4 硬件电路原理
2.3 软件设计
软件算法流程如图5 所示,软件实时监控控制目标的更新输出,如果没更新则维持上一状态输出,如果有更新则只能在线监控模块电路,完成电磁阀直流内阻在线测量。根据电磁阀直流内阻,结合控制目标和控制环境参数,完成对PID初始输出的估算计算。

图5 软件结构流程图
2.4 仿真验证
2.4.1 仿真模型搭建
使用Matlab 平下的Simulink 和Simscape 工具箱联合完成仿真。如图6 所示,以法士特液力缓速器所使用的电磁阀为对象,由电阻R2(24 欧)和电感L2(20 mH)串联等效,D1 为续流二极管,DC24V 为电源,Current Sensor 为电流采样,三极管Q1 和电阻R1 完成对电磁阀的PWM 驱动,Controlled PWM 为PWM 发生器,根据输入的占空比输出对应的PWM,PWM 的频率选2 kHz,Discrete PID Controller 为PID 控制器[2]。

图6 仿真模型
仿真模型中,Discrete PID Controller 控制器控制逻辑如图7 所示。常数TargetCurrent 模块仿真目标控制电流,常数CalPWM 仿真预估模块计算的给PID 控制器初始化的起始占空比。PWMout 端口输出该模型计算出来驱动电磁阀所需的PWM 占空比。

图7 PID 控制模型
2.4.2 传统电磁阀电流闭环PID 控制仿真
以目标控制电流800 mA 为控制目标,选PWM 的基础频率为2 000 Hz,分别以施加大激励和不施加大激励的传统方式进行仿真,结果如图8 所示。

图8 电磁阀标准PID 电流闭环仿真结果
从仿真结果可以看出,传统电磁阀PID 电流闭环控制系统在0.015 s 左右基本达到了目标稳态电流,系统动态响应效果差。
2.4.3 基于预估算法电磁阀电流闭环PID 控制仿真
以同样控制对象和仿真条件进行仿真,结果如图9 所示。

图9 基于预估算法的电磁阀PID 电流闭环仿真结果
从仿真结果可以看出,基于预估算法的电磁阀电流PID控制方法,在PID 开始控制之前,由于估算出了相对准确的PID 初始输出数值,使得PID 控制器能在与控制目标相对接近的位置进行控制,从而可以大大减少系统的振荡调节时间,提高了系统的动态响应。
3 结论
本文通过以上对传统电磁阀电流PID 控制和基于预估算法的电磁阀电流闭环控制方法的分析对比和仿真可以看出,本文所提出的这种电磁阀电流闭环控制方法可以大大提高系统的动态响应,通过仿真可以看出,在同样条件下,可以比传统的电磁阀电流闭环控制算法的动态响应时间提高一个数量级,对系统的动态响应改善很大。
