外骨骼式下肢助行机器人结构设计及分析
2021-08-27桓茜,王伟
桓 茜,王 伟
(陕西工业职业技术学院航空工程学院,陕西咸阳712000)
0 引言
下肢外骨骼助行机器人是一种双足动力行走系统,主要服务需要医疗康复、助力行走的人群[1-3]。目前外骨骼机器人的驱动方式主要有气压驱动、液压驱动及电动机驱动3种方式。气动驱动设计简单,但驱动力较小,控制精度较差。液压驱动的结构紧凑,但驱动力矩和响应速度不够平稳。电动机驱动的安装和控制方式比较简单,主要是通过安装在人体下肢重要关节的关键自由度处来实现运动功能[4-6],但整体尺寸和质量有所增加。
文献[7]采用直流电动机和谐波减速器驱动外骨骼,电动机与外骨骼垂直布置,轴向尺寸较大,承载不平稳。文献[8]在髋关节两侧垂直布置了驱动电动机,膝关节采用四连杆机构,并依靠髋关节的惯性力作为驱动源,除了髋关节之外,其他关节自由度都是被动的。文献[9]设计了步进电动机和弹性元件驱动外骨骼,增加了机构的柔顺性,但外骨骼的驱动响应的稳定性较差。
本文设计一种伺服电动机驱动的外骨骼式下肢助行机器人的机械结构,伺服电动机通过一个锥齿轮换向装置实现与机器人腿部平行布置方式,增加了机构运动的平稳性。利用ABAQUS软件求解机器人在不同运动姿态下的应力和形变,通过机械系统动力学自动分析(automatic dynamic analysis of mechanical systems,ADAMS)软件求解各关节的运动学曲线,以为机器人机械的结构改进和控制设计提供一定的依据和支撑。
1 外骨骼式下肢助行机器人机械结构设计
1.1 外骨骼式下肢助行机器人特征
外骨骼式下肢助行机器人各段长度设计为:臀部宽327 mm,大腿长度430 mm,小腿长度372 mm,足长260 mm,足宽102 mm。设计的每个关节部位应有一定的长度可调节性[10-11],承载人体质量为50~70 kg。
从人体生物运动机理上,髋部和踝部机构需要3个方位的活动,膝部机构需要1个方位的活动[8],具体运动形式见表1。
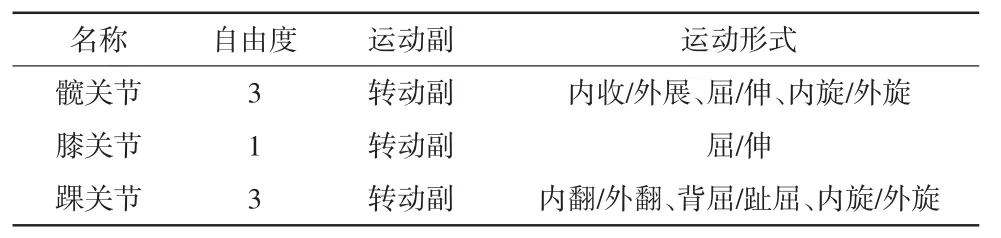
表1 下肢各关节的运动形式
1.2 外骨骼式下肢助行机器人样机结构设计
伺服电动机驱动的外骨骼式下肢助行机器人结构如图1所示,其中膝部构件仅有一个屈/伸运动形式,髋部构件包含髋关节的3个运动形式。为了满足助行机器人安装和驱动的稳定性,只分别在髋部构件和膝部构件处安装一个伺服电动机,踝部构件的运动依赖人体行走的惯性。为满足不同患者身高的要求,将大腿和小腿构件设计为长度可调节(5~10 cm)的刚性杆件。
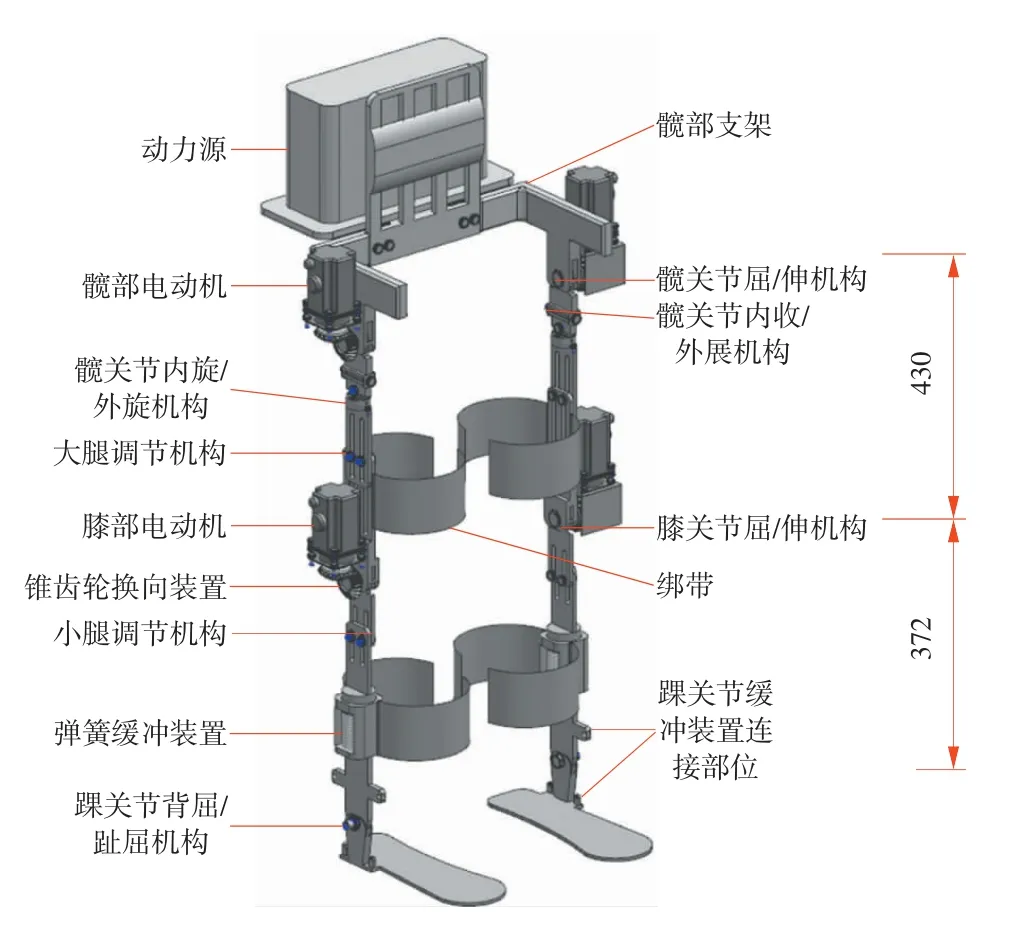
图1 外骨骼式下肢助行机器人系统结构图(单位:mm)
如图2所示,在膝关节(髋关节)处利用直角锥齿轮换向装置使驱动电动机与大小腿构件实现平行布置方式。此外,为了减小地面对人体和外骨骼的刚性冲击,在小腿处设计有弹簧缓冲装置,以达到减震的效果。
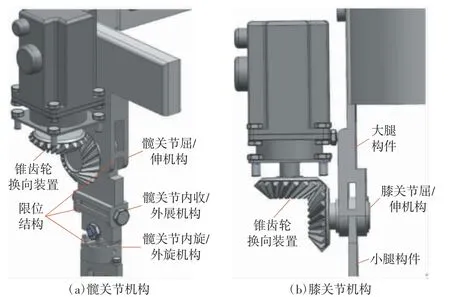
图2 锥齿轮换向装置
2 外骨骼式下肢助行机器人的结构静力学分析
在一个完整的运动周期内,选取其中4个不同的关键步态对下肢构件进行应力与形变分析,不同步态模式(gait model,GM)下的关节角度见表2。
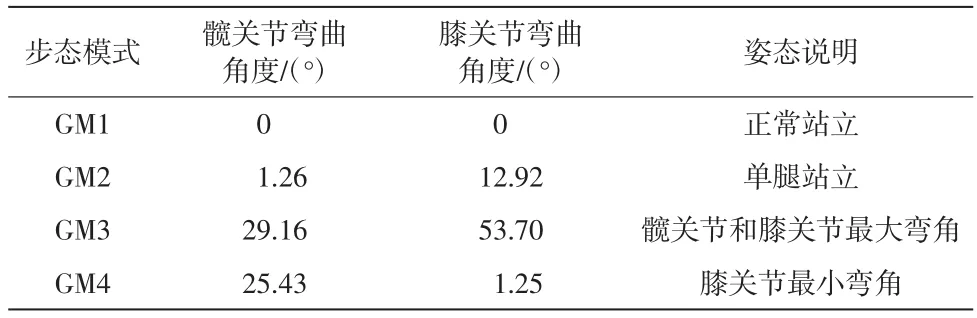
表2 不同步态模式的关节角度
由于外骨骼式下肢助行机器人的机械结构主要是髋部和膝部承载受力,在静力学分析时将影响较小的双足省掉,将支架和驱动机构简化为各段的载荷,基于ABAQUS软件对下肢助行机器人进行静力学分析,具体设置内容如下:
(1)截面属性:各构件采用高强度不锈钢材料,其密度为7.9 kg/cm3,弹性模量为206 GPa,泊松比为0.33,弯曲强度为207 MPa。
(2)边界条件:膝部构件之间定义为表面-表面接触,其他定义为绑定约束;膝部连接处设置1个自由度,其余连接处为固定支撑[12-13]。
(3)定义载荷:髋关节和膝关节的驱动分别等效为60和35 N的重力。假定人体质量为71 kg,大腿的相对质量为14.19%(99.6 N),小腿的相对质量为3.67%(25.6 N),足部的相对质量为1.48%(10.36 N),其余体段的相对质量为27.04%(564.62 N)。
在ABAQUS软件中,在下肢助行机器人的各承载点处建立参考点,并将参考点与各承载表面耦合分布,将人体各体段的质量分别加载到相应位置。对其中一侧机构进行分析,图3为不同步态模式下的分析结果。
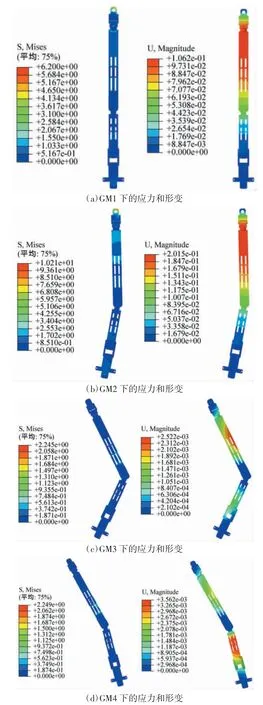
图3 不同步态模式下的应力(左)和形变(右)
由图3可知,在4个不同的步态模式下,支撑相(GM1和GM2)的应力和形变大于摆动相(GM3和GM4)。在支撑相中,助行机器人承受人体全部质量,其最大形变和应力分别为0.20 mm和10.21 MPa,形变区域主要分布在膝关节处,最大形变出现在髋关节处。在摆动相中,当髋关节和膝关节具有最大弯曲角度时,其最大形变和应力分别为0.002 5 mm和2.25 MPa;当膝关节具有最小弯曲角度时,其最大形变和应力分别为0.003 5 mm和2.25 MPa。
3 外骨骼式下肢助行机器人的运动学分析
在图1所示的外骨骼式下肢助行机器人的机械结构中,将O0X0Y0Z0坐标系建立在其背带架的中心位置(即人体臀部中心)。以单侧机构为对象,简化为6杆机构,对应的D-H模型如图4所示。
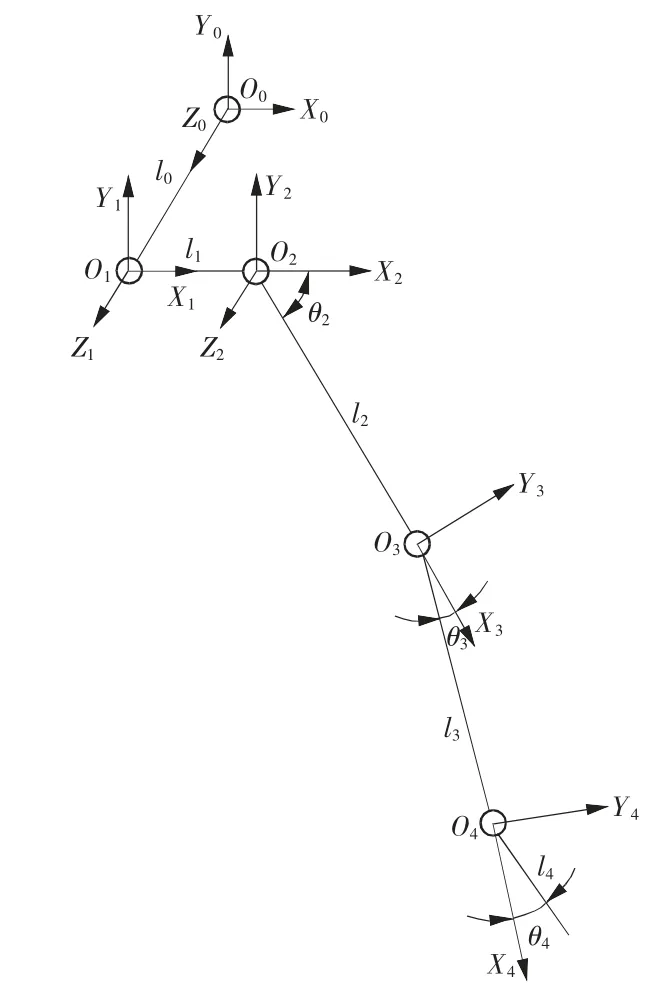
图4 D-H模型
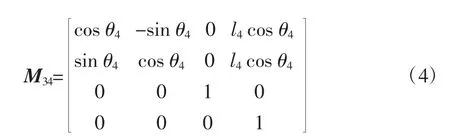
相邻杆件的位姿矩阵分别如下:

同理可得[9],髋关节、膝关节和踝关节相对于坐标系O0X0Y0Z0的齐次坐标方程为
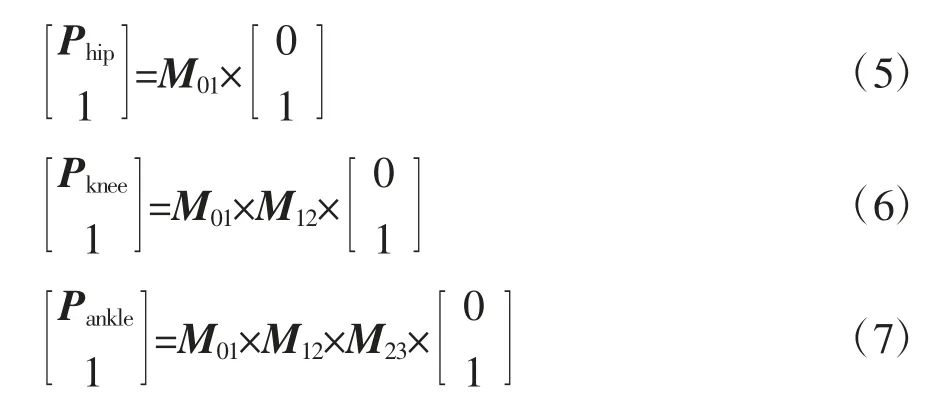
式中,Phip为髋关节的坐标方程;Pknee为膝关节的坐标方程;Pankle为踝关节的坐标方程。
利用ADAMS软件对助行机器人机械结构进行仿真研究。为了便于分析,将助行机器人的驱动电动机、换向装置和弹簧缓冲装置简化掉;各关节设置为旋转约束,髋部支架设置为移动约束;各关节的驱动函数分别为AKISPL(time,0,SPLINE_1,0)*1d等[14]。
在一个步态周期内(1.5 s)各关节的角度和位移变化曲线如图5、6所示。

图5 各关节的角度变化曲线
从图5可看出下肢助行机器人运动连续,左腿和右腿为反对称变化,下肢助行机器人与人体关节角度变化一致,符合人体步态特征。
以左腿结构处于竖直状态为例,由公式(5)~(7)可得
由于髋关节处的坐标系相对于参考点是固定不变的,故图6中髋关节在水平和竖直方向上的位移变化为固定值,分别为100和65 mm。在D-H理论分析中,未考虑髋关节及其支架实际装配的尺寸,故Phip在Y方向的值为0。
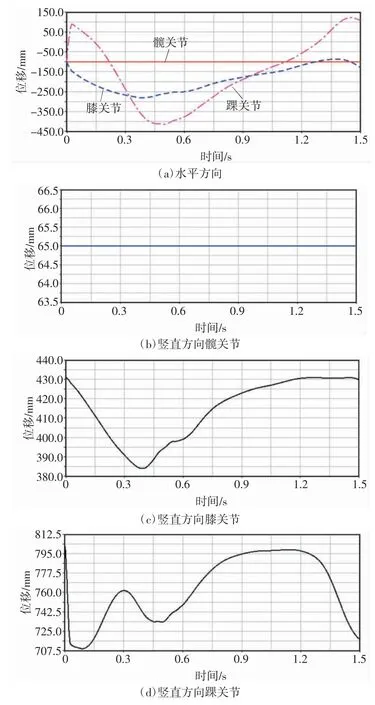
图6 各关节的位移变化曲线
如图6所示,在1.26 s时刻,大腿处于竖直状态,膝关节最大位移值为430 mm,踝关节最大位移值为802 mm(大腿和小腿均处于竖直状态),则对应的小腿杆件长372 mm,这与理论分析一致。在0.38 s时刻,大腿处于最高状态,膝关节水平方向最大位移值为279 mm;在0.49 s时刻,踝关节水平方向最大位移值为412 mm。
4 结语
本文设计了一款伺服电动机驱动的外骨骼式下肢助行机器人,利用ABAQUS软件分析了4种关键步态下膝关节的应力和形变,显示应力区域主要在膝关节处,所设计机器人结构符合静力学要求。利用ADAMS软件分析了助行机器人的位置变化曲线,仿真结果与D-H模型计算结果一致,符合人体下肢运动特征,能够为助行机器人的机械结构优化和控制设计提供一定的依据和参考。但在应力和形变分析中还需进一步改进,由于助行机器人的运动状态是复杂变化的,存在惯性力和冲击力的影响,需进一步结合非线性动力学分析应力和形变随时间的动态变化。
