双足自主寻迹行走机器人设计
2021-08-26周书兴王星海
周书兴 王星海


摘 要:双足行走机器人具有12个自由度,包括10个扭矩1.5 N·m的总线舵机和2个扭矩0.15 N·m的普通PWN(脉冲宽度调制)小舵机,10个总线舵机构成机器人的腿部,2个小舵机构成腰部和头部。总线舵机之间用硬铝金属U形件和多功能连接件,用防松螺丝套件连接。脚底由透明亚克力板构成,底部粘接带颗粒软橡胶皮,提高机器人与地面之间的摩擦来防滑。本设计采用STM32f103RCT6单片机作为双足行走机器人的控制核心,通过嵌入式程序开发,使用线性CCD(电荷耦合器件)让机器人自主寻线,并采用STC8A8K单片机对线性CCD进行控制,在OLED显示屏上显示CCD采集的电压值,从而实现对机器人行走路径的精准控制。
关键词:STM32F103RCT6;线性CCD;STC8A8K;仿人机器人
中图分类号:TP242 文献标识码:A 文章编号:1003-5168(2021)09-0069-03
Abstract: The biped robot has 12 degrees of freedom, including 10 bus servos with a torque of 1.5 N·m and 2 ordinary pwm (Pulse Width Modulation) small servos with a torque of 0.15 N·m, and 10 bus servos form the legs of the robot, and 2 small servos form the waist and head. Duralumin metal U-shaped pieces and multi-function connectors are used between the bus servos, and they are connected with anti-loosening screw kits. The sole of the foot is composed of a transparent acrylic plate, and the bottom is glued with a granular soft rubber skin to improve the friction between the robot and the ground to prevent slippage. This design uses the stm32f103rct6 microcontroller as the control core of the biped walking robot, through embedded program development, linear CCD (Charge Coupled Device) is used to allow the robot to find the line autonomously, and the STC8a8k microcontroller is used to control the linear CCD, and the voltage value collected by the CCD is displayed on the OLED display screen, thereby realizing the accuracy of the robot's walking path control.
Keywords: stm32f103rct6;linear CCD;stc8a8k;humanoid robot
當前,双足行走步态规划、步法交换稳定控制和行走轨迹识别等是双足自主寻迹行走机器人研究的焦点,而仿人机器人控制系统设计的合理性将直接决定机器人本体最终的行走表现。同时,仿人行走机器人的运动机械结构设计合理,会降低运动控制的难度。仿人行走机器人的行走运动要求实现多关节的协同控制,确保重心稳定,这对仿人双足行走机器人的硬件尺寸和关节质量都有一定的限制性要求。
1 系统整体设计
双足自主寻迹行走机器人主要由机械结构和控制系统两部分组成。机械结构是机器人的整体骨架,本研究设计并制作了指定自主行走、寻迹、前进、后退、转弯等动作的双足自主寻迹行走机器人,根据预先设计的动作功能,绘制三维结构模型,然后进行结构分析、力学计算、运动仿真和加工装配工艺优化,确保在程序控制下实现其功能[1]。控制系统可以应用于机器人的行走步态规划、行走速度控制和路径识别转向等,控制系统的先进性程度与其功能的实现程度密切相关。控制系统是机器人的核心部分,人们要确保其工作性能稳定,保证控制精度可靠。
本研究设计的控制系统采用线性CCD采集的数据判断转弯,对采集的数据进行二值化处理,然后反馈给STC8A8K单片机,STC8A8K单片机将二值化处理后的数据转换成电压信号,再通过ADC(模拟数字转换器)规则通道传输给STM32F103RCT6单片机进行舵机的转弯控制。控制系统原理如图1所示。
2 机械结构设计
双足行走机器人的机械结构设计首先要考虑机器人的关节自由度数量,完成预先设想的动作功能[2],再考虑各个部件与舵机、接口、电池和控制板的连接尺寸设计。双足行走机器人可以实现类人的行走动作,并要求行走稳定和运动灵活,因此,行走机器人关节自由度数量的选择、各部分结构的自由度分配等影响双足行走机器人的功能实现。自由度越多,机械结构及控制系统越复杂,可实现的功能就越多。
通过分析机器人的行走过程可以看出,机器人向前迈步时,踝关节处必须配置偏转自由度和弯曲自由度各1个,支撑小腿;髋关节必须配置俯仰自由度和弯曲自由度各1个,支撑上躯体,实现移动双腿和转移身体重心等动作;膝关节处配置1个俯仰自由度,调整摆动小腿的着地高度;单腿设计5个自由度,步行运动中要求结构对称,双腿有10个自由度,前进与后退时,保证步行中落足平稳。
选材方面,双足行走机器人选用铝合金U形件,作为舵机固定和连接件。脚底采用透明亚克力板构成,并在底部粘接带颗粒软橡胶皮,提高机器人与地面之间的摩擦来防滑。多处金属零件进行自主设计、切割、加工和打磨,完善机器人整体结构,并且使用弹簧垫圈进行防松,使机器人更加牢固稳定。双足行走机器人的下肢结构如图2所示。
3 系统开发与控制程序
3.1 线性CCD
线性CCD的控制原理是在光能的作用下,感光阵列光电二极管产生光有源积分电流,积分电容再将存储的积分电流转化为电荷。电荷越多,光线越强,像素点灰度越低,显示白电平。线性CCD工作过程示意如图3所示。
3.2 舵机
本设计选用总线舵机,可以减少对单片机IO口的使用,防止单片机上线多且凌乱的情况[3]。机器人的整体结构采用质量比较轻硬的铝金属,经过力学计算,结合可选用舵机的扭矩参数,本设计选择15 kg的ZX361D舵机。
3.3 控制器
STM32F103RCT6单片机作为机器人整体运动的控制中枢,其程序已实现模块化,使用PWM模拟输出、USART(通用同步异步收发器)串口通信、ADC信号采集等,硬件相对简单,运行速度快,功耗低。
3.4 电源
本设计采用4节可拆卸3.7 V、2 000 mA的18650锂电池,其中3节作为总线舵机的动力来源,1节用于线性CCD等控制芯片供电,并且采用多个稳压模块进行稳压,分别将总线舵机电压稳定在7.5 V左右、线性CCD等控制芯片电压稳定在5.0 V左右,为了避免信号干扰,小舵机也单独使用5.0 V稳压。
3.5 控制程序
本研究通过线性CCD采集黑线的黑白电压值,并进行二值化处理,再对黑线的位置做电压差值处理,并发送给主控芯片,之后由主控芯片识别电压值的大小,使得机器人执行直走、左转或右转等命令[4-6],其间对总线舵机通信板发出串口通信命令,对PWM小舵机发出对应占空比的控制命令,以达到总线舵机直走、左转或右转的目的,而且PWM小舵机跟随其摆动。
3.6 程序调试
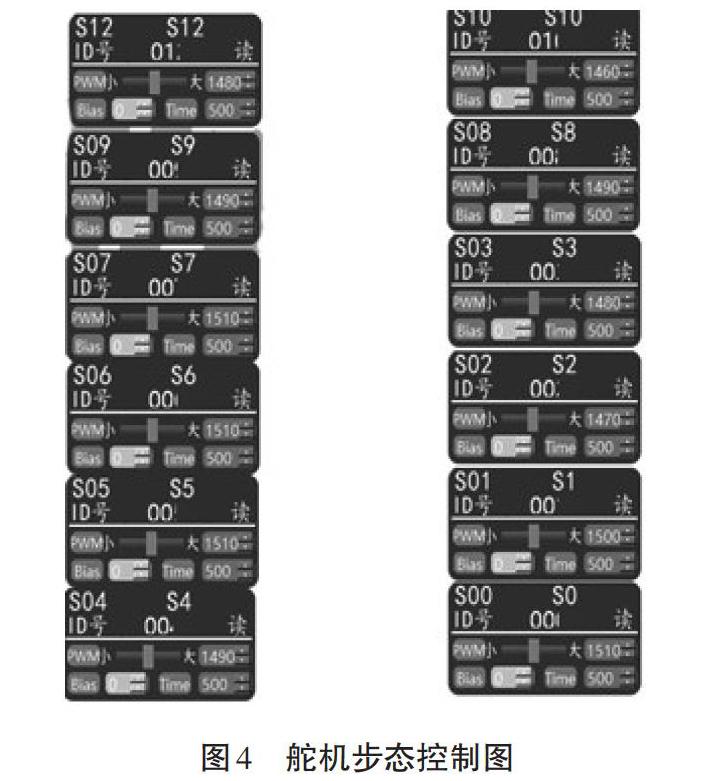
本设计通过计算机上位机连接总线舵机通信板对总线舵机(机器人腿部)进行角度、速度及步骤调试,再通过KEIL5调试把由上位机调出来的各组数据写入STM32F103RCT6芯片,最后由芯片控制机器人腿部(总线舵机)行走。其中,调试过程涉及抬腿、转移重心、转向等步骤。舵机步态控制图如图4所示。
在调试过程中,若出现机器人走路晃动、稳定性不好等问题,则要注意以下两个原因:一是机器人高度过大,导致重心比较高,平衡性不好,造成行走不稳定;二是步态设计不合理,在动作上,5个舵机要同时配合,每個舵机的角度和速度要做到协调。
4 结论
本次设计的双足行走机器人采用控制舵机转动角度的方式来控制行走,同时采用线性CCD采集数据进行处理,控制机器人寻线、转弯。线性CCD采集的数据比红外传感器采集的多,而且能实时对黑线的位置进行精准检测。为了防止丢线跑歪,本研究自行设计了一套防止丢线的算法,使机器人寻线更加稳定。笔者在调试时发现了转移重心的小诀窍,通过对人体运动学的深入研究,每踏出下一步,即将到达地面的瞬间,改变腿和脚踝的角度,完成重心脚转移,其间巧妙利用踏步的冲击力转移重心,既减缓了冲击力,又能快速地转移重心进行下一步,使机器人的行走稳定、快速。在组装或调试的过程中,在组装舵机时,人们一定要注意舵机的对称度误差,不然容易造成机器人腿长脚短;前期设计仿人机器人机械结构时,要注意仿人形对称结构,合理控制各关节结构的刚度和力矩。仿人机器人的关节都采用舵机控制,导致转换重心时身体会大幅度晃动,设计时可以考虑加上陀螺仪来控制身体的重心,使机器人的行走过程更加平稳。
参考文献:
[1]宫赤坤,菅坤杰,温新,等.双足机器人的设计与实现[J].现代制造工程,2014(12):41-45.
[2]刘述亮.双足直立行走机器人步态规划及其控制研究[D].成都:电子科技大学,2017:16.
[3]杨萍,樊迪.小型双足机器人步态规划研究[J].机械制造,2015(613):39-42.
[4]浙江大学工业控制技术国家重点实验室机器人团队.爬行与行走机器人及移动机器支撑技术[J].国际学术动态,2016(4):18-19.
[5]彼得·哈林顿.机器学习实战[M].北京:人民邮电出版社,2017:61-62.
[6]李艳生,孙汉旭.小型球形水底观测机器人设计分析与实现[J].机械工程学报,2020(13):103-109.
