智能网联汽车车载智能计算平台仿真测试评价
2021-08-26刘洋,杨宏
刘 洋,杨 宏
(中国电子技术标准化研究院,北京 100007)
0 引 言
汽车正向着电动化、智能化、网联化、共享化的“新四化”推进。随着智能化能力要求的提升,车辆需要具备高速、可靠、安全的计算能力,其本身已经逐渐变为一台新型移动智能终端。车载智能计算平台正是车辆的“大脑”,是车辆计算能力的集中体现。
面对更加复杂的功能需求,现阶段车载智能计算平台通常采取新型电子电气架构,以域控制器(Domain Control Unit, DCU)为核心,集成车辆电子控制单元(Electronic Control Unit, ECU)、车载摄像头、超声波雷达、毫米波雷达、车载通信终端(On Board Unit, OBU)等智能电子终端以及相关软件。但外部环境的复杂性、不可预知性以及系统本身的稳定性,都对车载智能计算平台的安全带来了巨大的挑战。因此在产品落地前需要对其进行大量测试,保障其在各种环境、状态及突发事件下都能够正常运行。
在实际测试中,传统的以整车功能性能验证为主的测试评价方式已越来越无法满足智能化车辆测试验证的要求。实际路测成本高昂、效率低下,仿真测试具有较大优势。一方面,仿真测试成本低,通过软件可构建复杂多样的虚拟交通场景,且具有很高的重复性和自动化程度,提高了测试效率,易于发现和定位问题;另一方面,一些实际路测中难以实现的极限工况或偶然概率事件,可以仿真模拟,极大扩展了测试的覆盖范围。此外,仿真测试可以在车辆上路前尽量减少错误,一定程度上提高了实际路测的安全性。仿真测试符合当前V型开发模式理念,使测试验证贯穿车载智能计算平台开发周期,使系统在快速开发迭代的情况下保证验证的充分性,极大提高了研发效率、降低了研发成本[1-4]。
通常,车载智能计算平台仿真测评包括3个层面:对系统算法和软件进行测试验证,即软件在环(Software in-the-Loop, SIL)仿真测试;对系统软硬件进行半实物仿真测试,即硬件在环(Hardware in-the-Loop, HIL)仿真测试;在车辆实际道路测试前,对装配了系统的整车进行仿真测试,即整车在环(Vehicle in-the-Loop, VIL)仿真测试[5-7]。
1 软件在环
软件在环可对车载智能系统算法和软件进行闭环仿真测试,覆盖底层软件算法及上层应用软件等,实现对车载智能计算平台的感知、定位、规划、控制等功能的仿真测试验证。软件在环通常采用场景模拟仿真,验证系统在特定场景下能否正确应对。对于软件在环而言,关键技术和模块主要包括场景构建和生成、传感器模拟、车辆动力学模拟、事件监测和判定。
1.1 场景构建和生成
测试场景的构建是仿真测试的重要环节,其多样性、覆盖性和典型性将极大影响测试结果。场景构建要包括道路、交通设施等在内的静态场景,以及场景的天气、光照等因素。由于仿真场景的复杂多变,人工手动建模很难满足大批量场景搭建的需求,因此通常通过高精度地图自动生成静态道路场景。
除静态道路场景模拟,更重要的是模拟复杂场景下的障碍物和交通参与者行为,实现动态场景仿真。动态场景可以描述为一个场景下各种障碍物及其组件的行为组合。根据不同类型的需求,障碍物通常可以分为静态障碍物、固定轨迹障碍物及带有限定智能行为的障碍物。
1.2 传感器模拟
传感器是车载智能计算平台中感知世界的工具,是支持智能驾驶的重要功能组件。传感器模拟能将大部分智能驾驶车端系统功能模块并入闭环,实现更完整全面的测试验证。
传感器仿真通常是对其实时数据进行模拟。主流传感器主要包含激光雷达、超声波雷达、摄像头及惯性测量单元IMU。在仿真过程中,需优化仿真器,使其能够实现实时数据输出。相较于传统仿真器仅支持离线模拟的特性,实时系统具有更高的效率和更好的用户体验,所见即所得。
1.3 车辆动力学模拟
车辆动力学仿真模拟方案在业界较为成熟,可以沿用经典的内燃机模型和轮胎模型,以API的形式提供多种车辆操控方式。
1.4 事件监测和判定
在大规模仿真测试中,使用人工监视大量车辆的行为十分困难。因此仿真测试需要具备车辆行为监测功能,自动监视目标测试系统行为是否符合预期。
在总结大量实地场景测试及仿真测试经验的基础上,可以抽象出一批通用系统测试结果判定条件,从而形成完整的行为监测功能。但由于测试系统判定条件会随着用户需求不断增加,该功能需要具有高可扩展性,同时要避免功能耦合,将每一种被抽象出来的行为监视组件作为一个独立的逻辑实体,逻辑实体之间不相关且监视条件严格正交。在这种情况下,可以提高行为监视组件添加与移除的便捷性,降低系统负担,提高需求响应速度。
2 硬件在环
硬件在环是通过实时处理器运行仿真模型来模拟受控对象,可以同时支持硬件、底层软件和应用层软件的仿真测试。对域控制器的仿真测试是该环节的关键。
从安全性、可行性和成本合理性三方面考虑,硬件在环已成为自动驾驶整车开发流程中非常重要的一环,在检验检测中也将发挥重要作用。
硬件在环主要内容:仿真系统将真实或虚拟的传感数字信号输入到域控制器中;域控制器进行规划和控制计算,输出线控信号;仿真系统接收线控信号后更新虚拟车辆状态和仿真结果,并将仿真结果反馈至域控制器。硬件在环整体框架如图1所示。
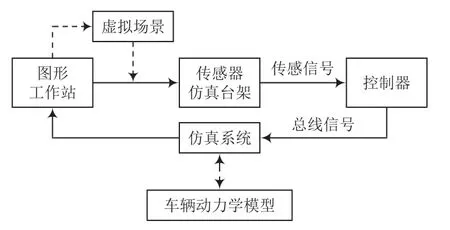
图1 硬件在环整体框架
硬件在环关键技术是对传感器的仿真。现今多传感器融合是车载智能计算平台主流方案之一,既可以是同类型多个传感器融合,也可以是不同类型的传感器融合。
(1)摄像头仿真。摄像头仿真通常有2种实现方式,一是利用真实视频在视频暗箱中播放给真实摄像头;二是通过摄像头射频注入模块(CSM)直接将交通场景图像信息传输给图像处理单元,代替真实摄像头检测交通场景。
(2)毫米波雷达仿真。毫米波雷达仿真主要通过空馈方式把接收的射频信号进行下变频处理后传递给厘米波分系统,按照系统注入的目标参数实时进行距离模拟、速度模拟和RCS模拟,并把模拟信号传递给毫米波分系统的上变频模块。经上变频后,实时生成相应的目标仿真回波,再发送给车用毫米波雷达。
(3)超声波雷达仿真。采用超声波回波模拟设备(超声波测试盒),将真实超声波传感器与声音换能器布置在其中。障碍物的距离信息由仿真软件发送到声音换能器,声音换能器形成的超声波由超声波传感器传递到控制单元。
(4)激光雷达仿真。由于很难实现对真实激光雷达环境的仿真,因此通常在交通仿真场景中设定理想激光雷达,并设置真实参数,配置交通仿真场景中静态和动态交通参与者表面的吸收率和反射率,同时配置交通仿真环境中的环境数据,使得理想激光雷达输出更贴合在真实交通环境中检测到的点云数据。
此外,由于车辆网联化程度的加深,对于V2X信号的仿真也成为重要的技术分支。
3 整车在环
整车在环目前主要应用于驾驶辅助系统ADAS复杂功能测试验证。其诞生是为了整合虚拟仿真技术与常规道路试验,以实现克服已知传统实车道路测试的局限。整车在环测试中,一辆真车将被“嵌入”至一个虚拟交通环境中(包含交通场景、交通标志、道路等)。
与实际路测相比,整车在环极大节约了成本,降低了测试风险,增强了测试的复现性,在硬件在环基础上提高了被测控制器测试结果的精确度,弥补了实际路测与硬件在环测试之间的差距。此外,整车在环还可复用软件在环和硬件在环测试的测试场景。
整车在环主要内容:仿真系统构建虚拟环境,输入真实车辆智能计算平台;车辆探测到虚拟障碍物后将相关信息传递给控制器;控制器进行分析决策后制定控制策略,实现车辆转向、制动等操作。
整车在环测试系统主要分为2部分:实物部分和仿真部分。其中虚拟仿真设备包含上位机、实时仿真器等;实物部分包含被测车辆的摄像头、超声波传感器、毫米波雷达等传感器和驾驶操作的接口适配单元。
就场地而言,整车在环可以分为2类:封闭试验场整车在环和暗室转鼓整车在环。封闭试验场可实现测试车辆横、纵向极限场景测试,但在做高速试验时对场地尺寸要求较大,因此封闭试验场整车在环主要用于中低速极限场景测试;高速纵向极限场景可在暗室转鼓整车在环中实现。此外,暗室转鼓整车在环仿真测试可以模拟交通极端拥堵条件下高密度V2X通信环境、城市峡谷等通信信号多径传输环境、高速条件下通信信号的多普勒频移等特殊的极限通信环境。这些场景几乎不可能在室外进行模拟,一方面,大部分智能网联汽车相关试验频率均受国家无线电频谱管理部门的管控,禁止随意向自由空间发射;另一方面,向自由空间泄漏的电磁波会对实际电磁环境产生污染,影响正常工作的设备的使用安全。
4 结 语
在智能网联车辆算法研发、系统测试和安全验证3个测试阶段中,仿真已成为必不可少的手段,这已是国内外业界的共识。目前,国内外也在陆续开展利用仿真方式进行车辆检验检测的试验,并已开展标准法规的预研工作。除仿真手段的革新外,场景数据库的设计也是仿真测试的重中之重。传统基于路测数据、现有事故数据库和人工创建的有限场景测试方式已远远不能满足使用要求,如何创建一个具有高度覆盖率的场景数据库、快速产生大量适用性强的新场景将是一个持续的课题。
