基于PLC和触摸屏的水田拖拉机多种动态参数检测系统设计
2021-08-25孙恒辉汪六三王儒敬
宿 宁,孙恒辉,2,黄 伟,2,汪六三,王儒敬
(1.中国科学院合肥物质科学研究院,安徽 合肥 230031;2.中国科学技术大学,安徽 合肥 230026)
0 引言
水田拖拉机行驶过程中的车速、姿态角、打滑率、下陷深度、驱动力矩等参数是反映拖拉机牵引性能和转向性能的重要指标[1],对这5 类参数的实时计算和监测有助于提高水田拖拉机的实时操作性、降低油耗、提高作业效率,同时也是了解拖拉机行走系轮胎或履带板与软质水田泥土之间力学作用机理的重要方式,其结果为水田动力机具的设计提供了有价值的依据[1-3]。
可编程逻辑控制器(PLC)是一种具有微处理器的用于自动化控制的数字运算控制器,主要功能包括逻辑控制、时序控制、模拟控制、多机通信等,和其他控制方式相比,PLC 控制系统具有可靠性高、抗干扰能力强、接线简单、易于功能扩展等优点[4-6];工控触摸屏是一种操作者与PLC 进行人机交互的终端工具,操作者只要用手触碰触摸屏上的图符或文字就能实现对PLC 发送指令和查询数据,摆脱了键盘和鼠标操作,大大提高了PLC 的可操作性和便捷性,使人机交互更为直接。
本文利用PLC 易于功能扩展、易通讯和工控触摸屏易于操作的优点,构建了一套多传感器输入、PLC 和触摸屏实时通讯、实时计算和存储的数据处理系统,该系统可对水田环境下拖拉机行驶过程中车速、姿态角、打滑率、下陷深度、驱动力矩5 类参数完成实时监测、后处理计算和数据存储,有利于提高拖拉机的实时操作性,并为水田动力机具的设计提供有价值的理论依据。
1 检测方法与传感器选型
1.1 总体方案设计
如图1a 所示,检测时,本装置安装在水田拖拉机的后侧,驾驶员或观测员手持移动端触摸屏。图1b 表示了该检测装置的主要组成结构和主要传感器的安装位置,其中,微型激光测距仪的轮廓示意图为虚线,表示其装在上下滑台的背面位置。

图1 检测装置实体与安装位置示意图
1.2 实际行驶速度
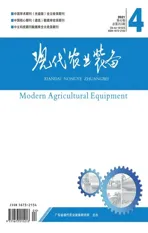
实际行驶速度通过检测挂载在拖拉机一侧或两侧的牙轮转速和牙轮尺寸来计算获取。如图2 所示,牙轮通过轴承座安装在主挂载平台上,牙轮可以沿该平台上下移动,牙轮上方安装有金属感应器。若距离金属感应器探头2 mm 的范围内存在有金属物体,其将发出脉冲信号给上位机。仔细调节金属感应器与牙轮凸起的位置,使其可以感知牙轮凸起但不能感知牙轮齿根轮面。
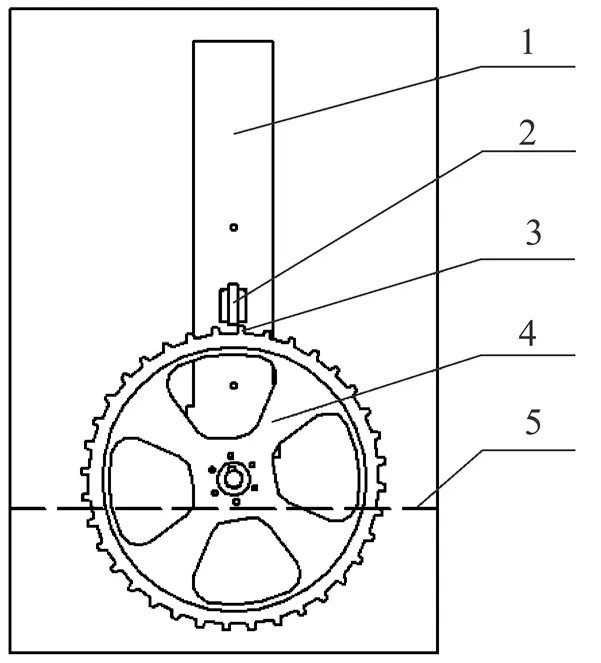
图2 利用牙轮轮面凸起检测车速示意图
牙轮表面均匀分布36 个凸起,即两个凸起的夹角为10°,表示牙轮转1 圈金属感应器将发出36 个脉冲信号。若通过上位机计时器记录下检测到两次脉冲之间的时间tm,结合牙轮齿顶圆直径Dt,则此时通过牙轮转动测得的拖拉机速度Vt计算式为

式中Vt为拖拉机速度,m/s;Dt为牙轮齿顶圆直径,mm;tm为两次脉冲之间的时间,ms。
所用金属感应器型号为82.5NOF,工作电压为24 V,最大负载电流为150 mA,距离检测范围2 mm,重复精度小于3%,响应时间小于0.5 ms,工作温度-25~+70 ℃。输出方式为NPN 常开,表示常态是常开的,检测到金属物体时,黑色线输出1 个负电压信号。其接线定义图如图3 所示。

图3 金属感应器的接线定义图
1.3 理论行驶速度和打滑率
计算打滑率首先需要记录理论行驶速度,而记录理论行驶速度需要记录主动轮的转速ωr,根据文献[7]中记录的方法:在转轴同一截面的圆周面上均匀贴上M块定向反光纸,将红外光电传感器对准这一截面,轴转动过程中,当红外光照射到定向反光纸,传感器又正好接收到反射光时,传感器就输出1个脉冲,计数器进行记数。这样,轴的转速n计算式为

式中n为轴的转速,r/min;Nr为计数器每秒接收到的脉冲个数,个;M为定向反光纸个数,个。对低速大直径轴,M一般取值60,对高速小直径轴,M一般取值12。
则不计打滑的水田拖拉机理论行驶速度通过主动轮转速计算式为

式中vr为水田拖拉机理论行驶速度,m/s;ωr为水田拖拉机主动轮的转速,(°)/s;R为主动轮的半径,mm。
则按文献[8],打滑率计算式为

式中δ为打滑率;vt为水田拖拉机实际行驶速度,m/s。
所用红外光电传感器型号为TB12J-D15N1,工作电压24 V,最大负载电流200 mA,距离检测范围100 mm,重复精度小于5%,响应时间小于1 ms,工作温度-25~+60 ℃。输出方式为NPN 常开,表示常态是常开的,当检测到反光纸反射的光线时,红外光电传感器黑色线输出1 个负电压信号。其接线方式、电气参数和数据传输原理与金属感应器一致。
1.4 下陷深度
由于水田环境下大部分被水体覆盖,水面会对激光或超声波产生漫反射,因此采用激光或超声波测拖拉机车体距离水面高度的方法检测拖拉机下陷深度并不适用于水田环境。如图4 所示,本文采用测量牙轮相对主挂载平台上下滑动的距离来表示下陷深度,而不是直接测量拖拉机车体距离水面的高度。
如图4 所示,主挂载平台装有微型激光测距仪,微型激光测距仪发射出的激光照射在上下滑台的L型底边上,将L 型底边设为检测面,上下滑台相对主挂载平台上下滑动时,上下滑台的L 型底边与微型激光测距仪之间的距离随之改变,该距离反映了拖拉机车体与地面之间的距离,即拖拉机的下陷深度。

图4 下陷深度检测面设置示意图
通过将本检测装置的L 型底边设为检测面,而不是采用将微型激光测距仪发射出的激光直接照射在水面上的方法测量水田拖拉机的下陷深度,避免了水面波动对激光的散射作用,有助于提高检测的可靠性和准确性。
所用激光测距仪型号为CCF-LAS2S-4M,工作电压24 V,最大负载电流80 mA,有效检测范围40~1 000 mm,重复精度小于1 mm,响应时间小于30 ms,工作温度-10~+85 ℃。输出方式为标准Modbus RTU 通讯协议。
1.5 姿态角
水田拖拉机车体相对地面的三维姿态角选用MEMS 陀螺仪来获取,MEMS 陀螺仪是一种高性价比的组合导航产品,其由惯性测量单元(IMU)、磁传感器等模块构成。产品内部嵌入扩展卡尔曼滤波算法,提供动态、静态环境下实时、高精度的横滚角、俯仰角和航向角;具有很强的抗震动、抗短时外部磁场干扰、高带宽等特性。相对于传统的组合导航系统,MEMS 陀螺仪尺寸小、质量轻、功耗低,通过产品内部各传感器模块的相互作用提高了产品的精度和可靠性。
MEMS 陀螺仪的型号为SC-INS-100S,工作电压5 V,最大负载电流100 mA,角度检测范围±180°,重复精度小于0.1°,数据输出速率10 Hz,工作温度-25~+60 ℃。通讯接口为485 串口,115 200 bps,8 位数据位,1 位停止位,无校验。
MEMS 陀螺仪中IMU 模块的通信模式为:IMU模块上电启动准备完成后,等待START 报文才可以开始按固定频率自动发送数据包,收到STOP 报文后停止发送数据包(不影响IMU 内部计算过程)。数据包报文发送频率可配置(10~100 Hz),默认100 Hz。
其数据报文格式为:除A3 帧所有数据、惯导的经度、纬度是无符号数外,其余所有数据均为补码,接收到的数据除以系数即为真实数据。
1.6 驱动力矩/扭矩
拖拉机主驱动轴上的驱动力矩/扭矩是利用贴在主轴上的应力应变片和应变电测技术测量,并通过无线网卡发送至数据处理模块PLC。
如图5 所示,在轴表面贴上与轴线成45°及135°的电阻应变片,以提高测量的灵敏度。当轴在扭矩作用下发生变形时,即可测得扭矩引起的应变,经过A/D 转换和换算得到扭矩值[7]。对信号进行调解、还原处理后,以电压的形式输出所检测的扭矩值大小,输出范围为0~10 V。输出电压Vout 的大小与被测轴的扭矩大小成正比,满足关系式(5):

图5 贴片式驱动力矩/扭矩测量结构示意图

式中MFS为满量程扭矩,N · m;VFS为满量程电压,V;E为轴材料的弹性模量,N/mm2;di为轴内径,mm;do为轴外径,mm;VEXC为电桥励磁电压,V;kGF为应变片灵敏系数;N为电桥桥臂数,取N=4;µ为轴材料的泊松比;GXMT为发射机的放大倍数。
所用驱动力矩/扭矩传感器的型号为TQ201H,工作电压为12 V,最大负载电流为30 mA,应力检测范围为±3 000 με,重复精度小于0.1%或±2 µε,数据输出速率为260 Hz,工作温度-40~+85 ℃。输出方式为标准Modbus RTU 通讯协议。
所用驱动力矩/扭矩传感器包括应变采集模块和无线网关传输模块,无线网关传输模块BS903 有8个采集通道,这里只使用1 个通道,用于采集驱动力矩/扭矩传感器应变采集模块的应变片受扭矩后输出的电压,实现AD 转换。应变采集模块有效A/D分辨率为24 bit,同步精度为1 ms。
所采用的应变片和无线网关的方法检测拖拉机主驱动轴上的驱动力矩/扭矩,是一种使用方便、适合测量各种轴径的轴的检测方法,克服了传统扭矩测量中旋转体上电信号不易传递,一种轴径就要一种集流环且集流环加工难度高等缺点。结合应力应变电测技术,使用极小的电阻应变片,即可测量出水田拖拉机在行驶过程中各种速度下驱动主轴的扭矩值。
2 检测系统电气部分构建
2.1 PLC选型
台达AS228T 型PLC 具有可靠性高,抗干扰能力强,易于扩展、寄存器和计数器数量巨大等特点,适合应用于构建本文提出的水田拖拉机行驶过程中动态参数检测装置的电气系统[8-10]。
2.2 PLC系统架构
本系统中,要检测的水田拖拉机参数为车速、姿态角、打滑率、下陷深度、驱动力矩,其中开关型信号2 组,485 类信号3 组。
PLC 的任务即为接受2 组开关信号,按公式(1)—(5)计算车速、打滑率,以及按485 协议,读取姿态角、下陷深度和驱动力矩的检测值;实现数据的实时采集和处理,上传数据到触摸屏存储和便于用户查看。
本检测系统采用开环控制的方式读取各传感器采集的数据,采用开环控制方式最大的优点是无反馈环节,即输出量C(s)受控于输入量R(s),且不能对控制量反施影响。本检测系统的PLC 控制系统硬件组成如图6 所示。
图6 检测装置PLC 控制系统硬件组成
2.3 PLC程序设计
系统程序采用ispsoft-DELTA IA-PLC 语言进行编写[9-11]。在梯形图程序中通过PLC 功能函数采集和存储2 组开关型信号和3 组485 类信号,实现多路检测信号的自动采集、转换、计算和存储,PLC控制的技术特点保证了测量系统的可控制性能、抗干扰能力及自动化程度等。
根据检测内容的需求和系统工作运行的要求,控制PLC 程序系统采用模块化设计思想,将检测过程中的采集牙轮转速计算实际车速、采集主轴转速理论车速、计算打滑率、采集下陷深度、采集三维姿态角、采集主轴输出的驱动力矩/扭矩的各功能模块作为独立的子程序模块,供主程序进行统一调用,以提高系统的反应速度,亦有利于后期程序升级与维护。软件设计流程如图7 所示。
如图7 所示,采集牙轮转速、计算实际车速的子程序实现了第1 组开关型信号的自动采集、转换、计算和存储的功能。

图7 PLC 控制软件流程图
实现第1 组开关型信号的自动采集、转换和存储的子程序同样也适用于测主轴转速的红外光电传感器开关型信号自动采集、转换和存储功能的实现。按两组开关型信号采集、转换、计算得到的实际车速和主轴转速的数据后,按公式(1)—(4)编写的子程序即可计算打滑率。
采集MEMS 陀螺仪测量的水田拖拉机车体相对地面三维姿态角的子程序,实现了第1 组基于485协议检测量的自动采集、转换、计算和存储的功能。水田拖拉机车体相对地面的三维姿态角包括翻滚角、俯仰角、偏航角。
采集激光测距仪测量的牙轮相对主挂载平台上下滑动的距离以表示水田拖拉机车体相对地面的下陷深度的子程序,实现了第2 组基于485 协议检测量的自动采集、转换、计算和存储的功能。
采集应变片和无线网关输出的数据以计算水田拖拉机驱动主轴驱动力矩/扭矩的子程序,实现了第3 组基于485 协议检测量的自动采集、转换、计算和存储的功能。
3 触摸屏选型与界面设计
触摸屏是一种提供操作者与自动化设备沟通的数字产品。人机界面提供多样化的通讯端口方便与各式各样的设备进行通讯,触碰式面板可让操作者直观地进行参数设定和按键操作,液晶屏幕则可呈现机台设备或各传感器的各项监控数据。此外弹性的编辑软件可让设计人员依照不同应用的需求情境,编辑所需要的呈现画面。
触摸屏选用台达DOP 110ws 型触摸屏,3 组独立串口,支持与3 种不同协议的控制器同时通讯,可实现一机多屏,搭载Cortex A8 800MHz CPU 和256 MB 内存,运行快速。触摸屏与PLC 通过串行网线进行通讯,传输速率为19.2 Kbit/s。触摸屏显示界面主页面如图8 所示。

图8 触摸屏显示界面示意图
本检测系统的监控被控量有水田拖拉机行驶过程中的实际车速、理论车速、打滑率、下陷深度、三维姿态角、驱动力矩/ 扭矩。所有监控量的实时数据都在触摸屏上实时显示,点击下方的按钮,即可进入相应检测量测量值的实时曲线显示界面。
4 系统调试与试验测试
搭载试验平台,测试本文设计的基于PLC 和触摸屏的多路传感器信号采集、处理和存储系统,在水田环境下拖拉机行驶过程中,所检测和计算的车速、姿态角、打滑率、下陷深度、驱动力矩5 类参数分别如图9—图13 所示,并进行存储。采样时间设置为0.1 s。

图9 理论与实际行驶速度检测值触摸屏显示示意图

图10 姿态角检测值触摸屏显示示意图

图11 打滑率计算值触摸屏显示示意图

图12 下陷深度检测值触摸屏显示示意图

图13 驱动力矩检测值触摸屏显示示意图
由图9—图13 可见,本文设计的系统具有较好的数据采集、通讯、处理、显示和存储的能力。
5 结语
本文基于PLC 和触摸屏优点设计的多传感器数据采集、计算、显示和存储的数据采集处理系统,可满足实时检测水田拖拉机在行驶过程中多种运动参数的要求。根据检测方案选择各种功能的传感器,包括2 组开关信号和3 组485 信号,采用ispsoft-DELTA IA-PLC 语言编写的系统程序梯形图,可以和传感器可靠、高效率地进行通讯,读取各传感器发送的数据。采集和计算所得的数据显示在触摸屏上,同时完成存储功能,方便用户实时观察和线下读取。系统试验和调试结果表明,本系统结构简单,运行稳定可靠,大幅度降低了检测过程中所需的时间和人力,有利于提高拖拉机的实时操作性,并为水田动力机具的设计提供有价值的理论依据。