水稻插秧机调平装置电控系统设计
2021-08-25张英祥李军伟倪云龙柳晓东
张英祥,李军伟,王 进,倪云龙,柳晓东
(1.山东理工大学交通与车辆工程学院,山东 淄博 255049;2.雷沃重工股份有限公司,山东 潍坊 261206)
0 引言
在水稻机械化种植技术中,水稻插秧机种植技术占有重要地位,秧苗的栽插深度是评价插秧机插秧质量的重要指标之一,直接决定着秧苗成活率以及返青的一致性。21 世纪以来,随着国内乘坐式高速插秧机的推广,为解决插植作业过程中左右两侧秧苗插入深度差距较大这一现象,有关科研人员开始重视对调平控制系统的研究和应用[1-6]。
国外对于插秧机调平控制系统的研究起步较早,随着技术的发展调平系统的控制精度和稳定性基本趋于成熟[6,7]。国内对插秧机调平控制系统的研究相对较少[8],贾全[9]研制了水稻插秧机仿形系统,不仅实现了行走方向上的仿形,而且还实现了横向仿形,但是由于采用了大量液压控制元件导致系统复杂且维修困难。吴海东[10]设计了高速插秧机插植部水平智能控制系统,利用单片机发出指令控制继电器的开闭,来控制电机的转向达到调平的效果,因其使用继电器控制,所以无法对电机实现变速控制。因此,设计一款采用小型直流电机为执行装置且能够实现变速控制的调平控制系统具有十分重要的意义。本文在前者研究的基础上,利用倾角传感器把倾斜角度实时的反馈给调平控制器,调平控制器将输入的倾斜角度同标定的基准角度进行分析比较,通过PID 控制器计算得出不同占空比的PWM 信号输出来控制电机转速和方向,保持插植部在预期状态作业,以期实现插植部的快速精准调平。
1 调平控制系统结构与原理
1.1 调平系统结构
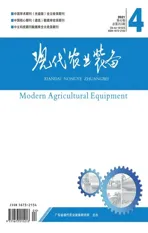
插秧机插值部结构如图1 所示,由秧台支架、浮舟、秧台、倾角传感器、弹簧、钢丝绳、直流电机、调平拉杆等部分构成,秧台支架和浮舟用于承载秧台和秧台上秧苗,插植过程中秧爪抓取秧苗后插入水田内,倾角传感器实时反馈插植部当前倾斜状态,弹簧、钢丝绳连接直流电机和调平拉杆,直流电机为调平过程中提供动力。调平系统由信号采集模块、信息处理模块和系统执行模块构成。调平系统的硬件结构原理如图2 所示,信号采集模块由倾角传感器、角度微调旋钮和A/D 转换电路等部分构成,该模块及时准确的将所采集到的数据传输给信息处理模块;信息处理模块由调平控制器构成,是整个调平系统的核心,负责处理信号采集模块采集来的数据和对系统执行模块作出决策;系统执行模块是安装在秧台支架上的可调速直流电机。
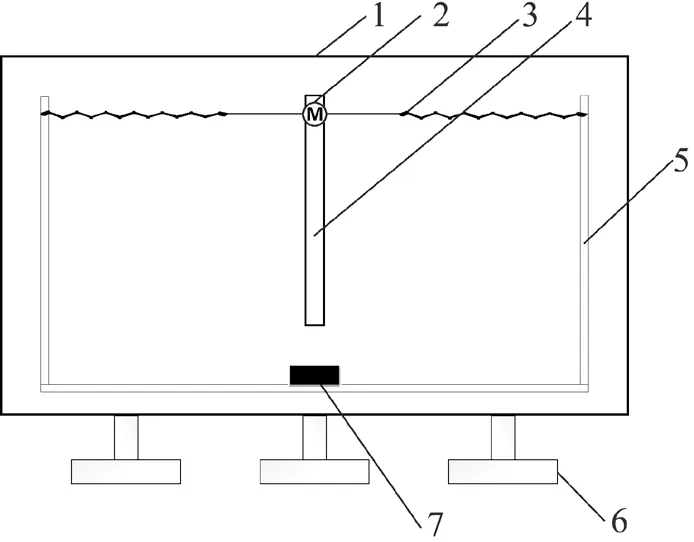
图1 插值部结构原理图
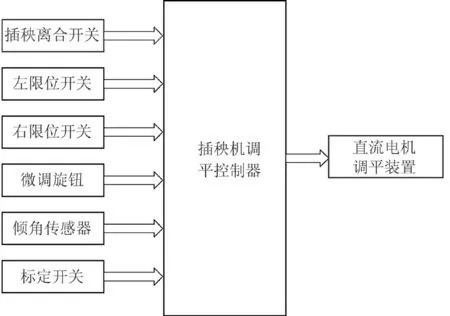
图2 调平系统硬件结构原理图
信号采集模块的角度微调旋钮的主要作用是在作业过程中,当插植部经调平稳定后不在水平位置或水田自身倾斜时,可以通过微调旋钮来对标定的基准角度进行预调节,微调旋钮可调节的插植部角度范围在-3~3°。安装在插植部底部横梁上的倾角传感器将插植部的倾斜角度实时传递给调平控制器,测量精度为0.01°。限位开关的作用是避免电机同方向持续转动,可有效避免弹簧卷入滚轮内。离合开关的作用是使上电后的调平控制器进入调平模式,使插秧机在插植作业时进行调平工作。标定开关的作用是消除倾角传感器在装配时产生误差,对调平基准值进行重新标定。
调平控制器需实时采集数据和浮点运算,要求有较高的运算速度和性能,因此,选用意法半导体STM32F205 系列32 位单片机作为处理器,其ARM架构的Cortex-M3 内核,主频达到120 MHz;具有低成本、低功耗、高性能的特点,符合本调平系统设计要求。
系统执行模块是安装在秧台支架上的永磁直流电机,堵转转矩达8 N·m,使用车载12 V 电源供电,电机转动时,通过钢丝绳拉动挂载在插植部上的弹簧使插植部产生摆动,电机在不输出转矩的情况下有自锁功能,可以一定程度上防止插植部在达到基准位置后因其他因素扰动而出现自由转动的情况。
1.2 调平控制原理
当水稻插秧机在水田进行插秧作业时,调平控制器通过对插植手柄开关信号的采集来检测插秧机的插植部是否处于作业模式,安装在插植部上的倾角传感器实时测量秧台的倾斜角度,将其与标定的基准角度进行比较分析,并判断倾斜角度的大小以及方向。经过PID 控制算法输出PWM 信号,从而达到控制电机转速和方向的效果。
电机利用接收到的PWM 信号输出转矩带动滚轮转动,由滚轮拉动钢丝绳带动两侧弹簧对插值部的倾斜状态进行调整,同时倾角传感器实时将插植部倾斜角度反馈给调平控制器,实现闭环控制。
当直流电机同方向转动幅度较大,而插植部仍处于倾斜状态时,因控制器一直控制电机输出转矩,为避免弹簧等部件被卷入滚轮等现象的发生,需要引入安全限位开关装置。在滚轮上设置凸起限位块用来触碰左/右侧的限位开关,电机同方向持续转动将会触碰限位开关并发出信号给调平控制器,调平控制器停止输出当前极性PWM 信号,电机停止同方向转动。一旦出现相反方向的倾斜状态时,控制器将会输出相反极性PWM 信号控制电机反方向转动。
2 系统软件设计
插秧机在作业时需面临复杂的水田环境,针对调平时插植部在水平基准附近抖动引起电机频繁换向调节,导致系统调节精度降低的问题,本系统设计了带有双阈值死区的PID 控制策略,解决了插植部的倾斜角度在死区边界时电机出现频繁调整的现象。因阈值存在,所以系统有一定的误差,采用PID算法,利用积分累加可以有效地消除误差,提高系统的控制精度和稳定性。
双阈值死区控制原理如图3 所示,0°为调平过程中插植部达到的目标倾斜角度,-0.4~0.4°为死区区间。当插植部右倾时,倾斜角度由0°逐渐上升,当插植部倾斜角度达到0.5°时,此时达到死区边界,如果角度不再增加,则调平系统不进行调节。如果角度继续增加超过0.5°时,PID 控制器开始输出PWM 信号,在调平系统的调节作用下,插植部倾斜角度逐渐降低,如果小于0.3°时,PID 控制器停止输出PWM 信号,调平系统停止工作。当插植部左倾时同理。
图3 双阈值死区控制原理
以水平基准值为目标值,与插植部上的倾角传感器反馈角度做差得到误差值error(k),经双阈值死区PID 控制器计算后,输出相应的PWM 信号,驱动直流电机进行调平。
调平控制器上电后底层驱动进入初始化,初始化完毕后进入程序主循环。如图4 所示,系统先进行故障检测,通过比较采集进来的数据是否在合理范围内判断系统是否产生故障,如果检测到故障产生,系统停止工作并向作业人员发出警告。在插秧离合开关闭合后,系统通过读取传感器的数值,实时计算插植部的误差角度,如果误差角度不为0,则进入双阈值死区PID 控制算法。如图5 所示,Flg 初始值为0。算法先判断error(k)是否大于0.5,如若大于0.5 则error(k)=error(k),同时标志位Flg 置1,系统进行调节;如果error(k)小于0.5,则判断error(k)是否大于0.3,如若不大于0.3,则error(k)=0,同时标志位Flg 置0,系统不进行调节;如果error(k)大于0.3 则判断标志位Flg 是否为0,如若Flg=1,则error(k)=error(k),系统进行调节,如若Flg=0,则error(k)=0,系统不进行调节。当error(k)小于-0.5 时同理。
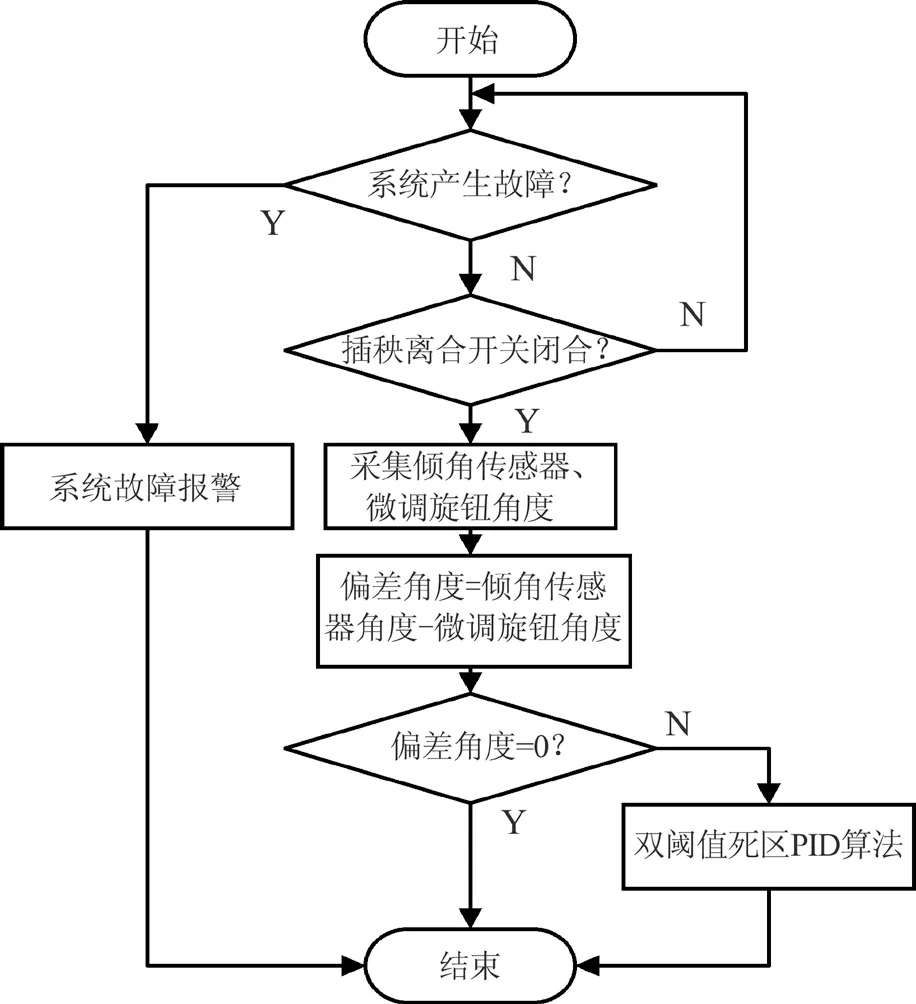
图4 控制策略主流程图
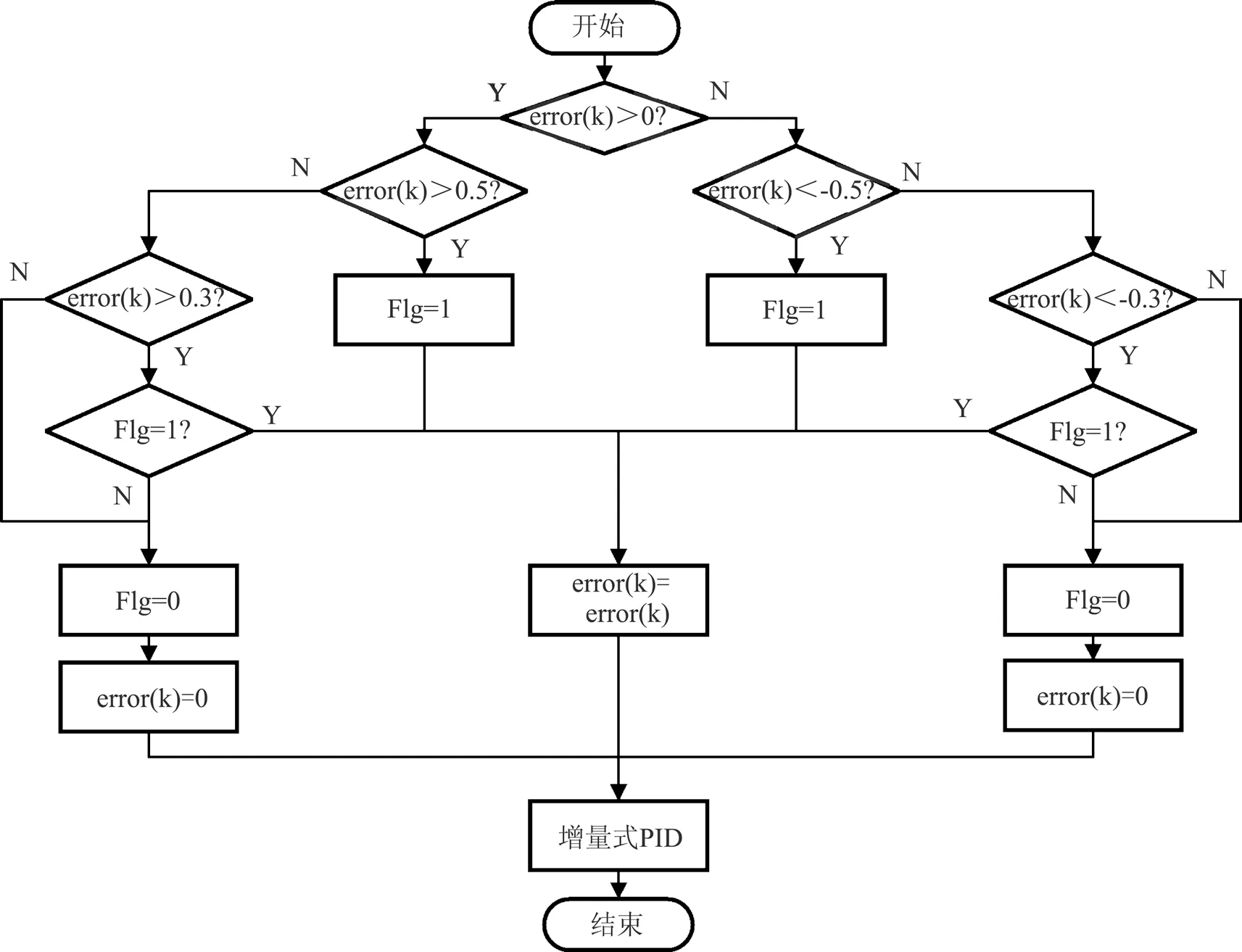
图5 双阈值死区PID 控制策略流程图
3 调平控制器硬件设计
软件系统的设计离不开硬件系统的支持,设计的控制器硬件在满足软件运行的前提下有较低的生产成本和较高的可靠性。控制器内需要集成H 桥电路用来驱动直流电机,针对电流大、功率高等特点,要求有较高的散热能力和绝对的安全性能。控制器硬件设计包括STM32F205 单片机最小系统、电源电路、AD 采集电路、低有效开关采集电路、CAN 通信电路、H 桥电路。
3.1 电源电路设计
考虑到控制器内部集成H 桥电路,为避免对其他电路元件造成干扰,同时减少板上的大电流布线,对外部12 V 电源在板内分开进行滤波处理,一路给H 桥芯片供电,另一路给板上其它器件供电,包括主控芯片、CAN 通信等其它外围电路。因调平控制系统中含有5 V 供电的微调旋钮等部件,所以设计两路5 V 电源输出电路供传感器使用,如图6 所示。
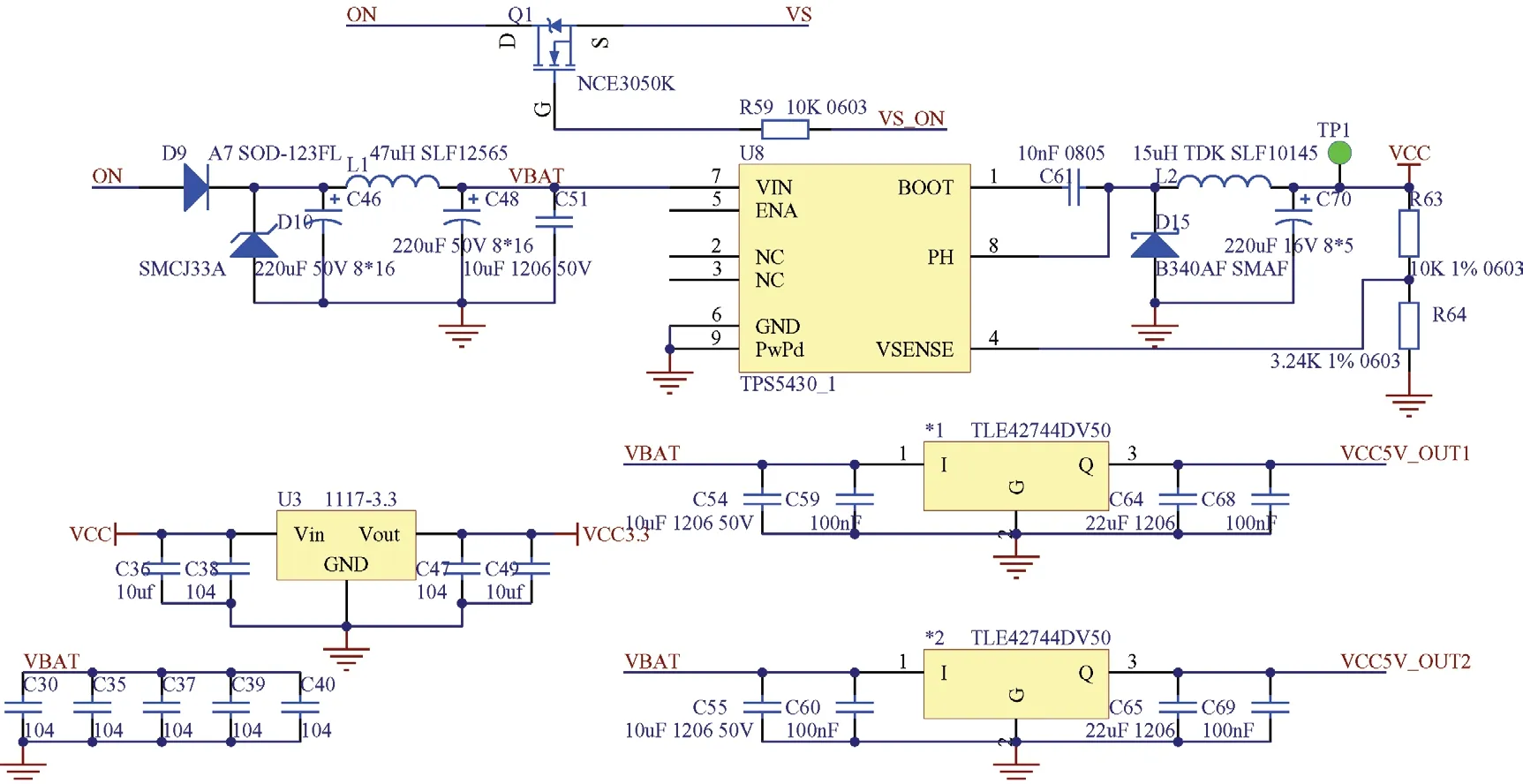
图6 电源供电电路
3.2 低有效开关采集电路
设置调平控制系统的开关量为低有效,电路的起始端加一个上拉电阻,为输入端悬空时提供一个稳定的输入电平,防止出现其他信号干扰。使用常见的RC 低通滤波电路去除因开关抖动产生的高频干扰信号。如图7 所示。
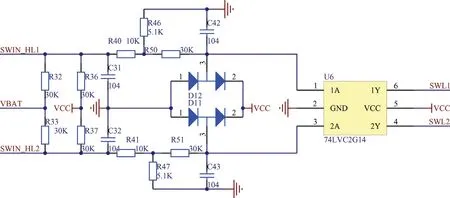
图7 低有效开关采集电路
3.3 AD采集电路
在调平控制系统中,微调旋钮输出电压信号给单片机,采样精度最高达12 位。在单片机采集之前,AD 采集电路将信号进行了连续的两次滤波处理,包括电容滤波和RC 低通滤波,确保接入单片机信号的纯净。如图8 所示。
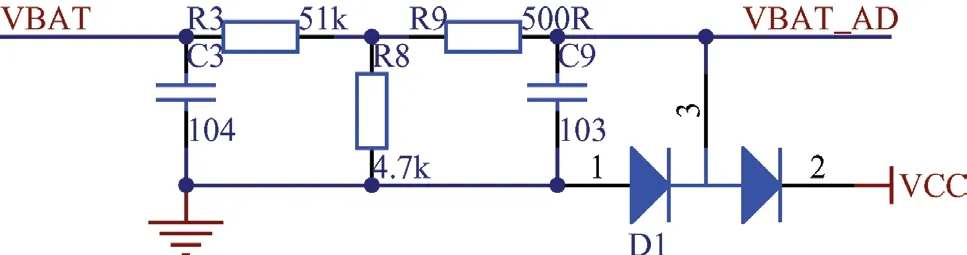
图8 AD 采集电路
3.4 CAN通信电路
由于单片机内部集成了CAN 控制器,所以此处只需匹配收发器即可。CAN 收发器的作用主要是电平转换,在发送报文时,CAN 收发器将待发送的数据转换为差分电压;在接收报文时,CAN 收发器将差分电压转化为数据,如图9 所示。
3.5 H桥电路
由两个相同结构的电路组合构成一个H 桥整桥电路,选用英飞凌BTN8962TA 大电流PN 半桥,该半桥芯片具有电流检测、过温、欠压、短路保护等功能,最高承受电压达40 V,最高电流30 A,满足本系统设计需要。电路原理图如图10 所示。
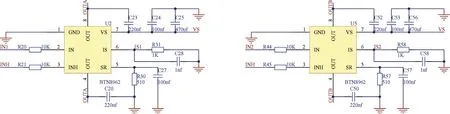
图10 H 桥电路
4 田间试验
插秧机调平控制系统调平目的是保证秧苗最终的插入深度一致,在行驶过程中,不发生插秧机因车身倾斜带动插植部倾斜,导致插植部一侧秧苗没有插入水田中,而另一侧被水淹没等现象。如图11所示。

图11 插秧机水田作业试验现场
4.1 整地泡田
在收获上季水稻之后,需要对水田进行整地,使用翻地旋耕等方法将上层杂草等旋至土中,整地深度保持在12~15 cm,保持水深为5~7 cm,沉淀时间为15~20 d,如果沉淀时间过短,会因水田过于松软,导致插秧机前进困难。插秧时水田水面应保持在1 cm 左右,如果田内水过深会导致漂秧甚至淹没秧苗,过浅会在插秧时秧爪粘泥导致粘苗,造成漏插、伤苗等现象。
4.2 秧苗深度数据采集
本次试验使用两台六行插秧机在同一水田内作业,为准确地反映出秧苗插植的最大偏差深度,插秧作业后选取插植部的最左侧和最右侧共计150 组600 棵秧苗,拔取测量插入深度后,将最左侧秧苗插入深度与最右侧秧苗插入深度相减得到偏差,然后进行数学统计分析。图12 所示为一台使用本调平控制系统,另一台使用市场现有调平控制系统的插秧深度偏差分布,经计算分析本调平系统和市场调平系统其标准差分别为4.75、6.99,极差分别为29、38 mm,均值分别为0.17、0.30 mm。可见本系统的插秧深度偏差分布相对集中,并且均值较小,具有较高的稳定性,调平效果明显优于市场现有的主流调平系统,满足插秧要求。
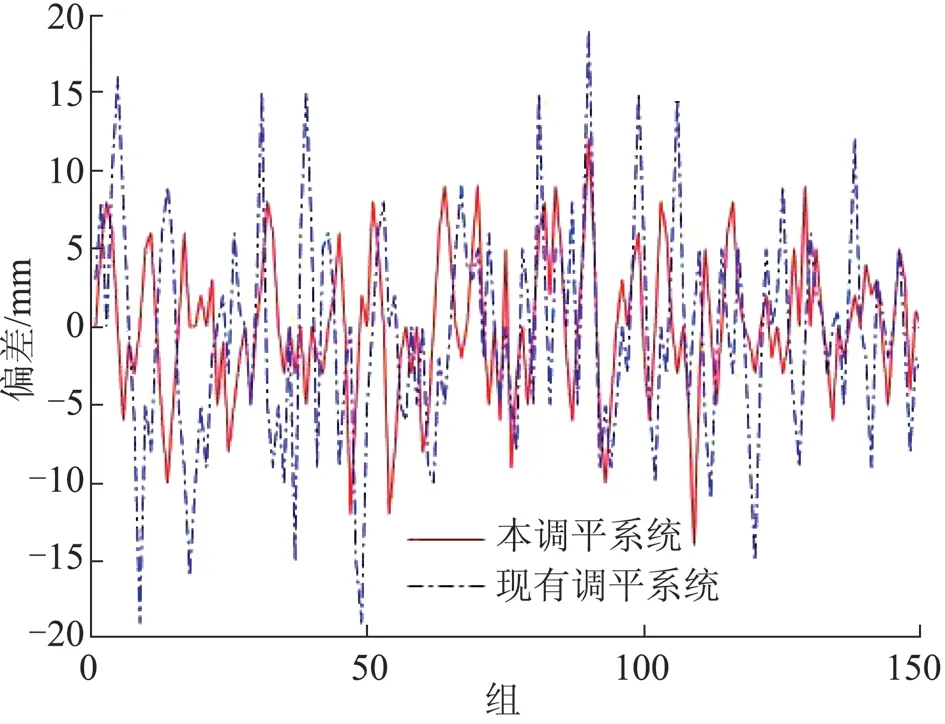
图12 不同调平系统左右两侧插秧深度差变化分布
5 结语
设计了一种插秧机自动调平控制系统,介绍了其工作原理,利用基于双阈值死区控制的PID 算法,有效提高了秧苗深度的一致性,同市场主流插秧机调平系统相比,极差、标准差等均有较大改善。双阈值死区控制使其小角度时有较好的稳定性,同时有效地过滤了水田内因承力层起伏对插植部造成小的扰动,具有相对较高的控制精度和插秧效果,符合本系统的设计要求。