一流课程建设需求下的“运动控制系统”教学研究
2021-08-24樊启高沈艳霞朱一昕黄文涛
樊启高, 沈艳霞, 朱一昕, 黄文涛
(江南大学 物联网工程学院,江苏 无锡 214122)
0 引言
2019年10月,在教育部关于一流本科课程建设的实施意见[1]中提到,课程是人才培养的核心要素,课程质量直接决定人才培养质量,为满足新时期的课程教学要求和人才培养需求,应当全面建设“国家级一流本科课程”[2~4]。
“运动控制系统”是我国高等学校自动化、电气等相关专业的核心课程[5]。传统的教学方式是教师线下讲授,学生被动学习为主。在这样的教学模式下,其书本中知识点和课程内容经多年的课堂实践已经非常成熟,但还是难以满足新时期对于培养高质量优秀人才的需求。因此,研究如何提高课程理论先进性和课程实践创新性的方法,是高校紧跟时代潮流、提升课程质量、高质人才培养的关键[6]。
本文面向“国家级一流本科课程”建设的需求,为保证课程教学的时代性和先进性,以“运动控制系统”现有的先进控制技术为出发点,将当下具有前沿性的模型预测电流控制(Model Predictive CurrentControl)和弱磁控制(Flux Weakening Control)相结合,针对三相表贴式永磁同步电机(Permanent Magnet Synchronous Motor),利用了模型预测法增加非线性约束的能力和弱磁扩速的特点,设计出了一种兼具先进性和挑战性的控制策略,能够在电机超基速运行的同时保证定子电流不产生畸变。接下来,根据相应的理论推导,利用Matlab/Simulink平台搭建对应的仿真得到理论结果,最后搭建实验平台并进行实践和验证。这种理论与实践合理搭配的教学过程,在教师引导学生激发学习兴趣的同时,也便于学生在专业知识上能够纵向深入,有利于培养学生运用先进理论方法解决复杂问题的能力,对高质量优秀人才的培养有着重要意义。
1 模型预测电流控制策略
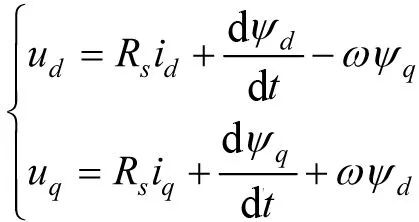
模型预测控制在电机驱动中作为一种调制方法[7],能够处理系统中的非线性约束,相较于传统SVPWM能够有效减小电机定子电流脉动、转矩脉动和磁链脉动[8]。PMSM在dq坐标系下的定子电压方程为:
(1)
定子磁链方程为:
(2)
式中,ud与uq、id与iq、ψd与ψq、Ld与Lq分别为定子电压、定子电流、定子磁链和定子电感在dq轴上的分量,Rs为定子电阻,ω为转子电角速度,ψf为永磁体磁链。
由式(1)可以得到PMSM在dq坐标系下的电流随时间的导数为:

(3)
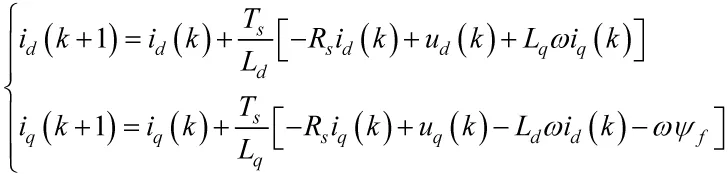
将式(2)代入式(3),并采用前向欧拉法对其进行离散化可得:
(4)
式中,id(k)与iq(k)分别为当前时刻定子电流在dq轴上的分量,id(k+1)与iq(k+1)为下一时刻dq轴电流的预测值,Ts为控制周期。
针对离散模型中的d轴电流和q轴电流设计价值函数为:

(5)
式中,idref和iqref分别为dq轴电流的给定参考值,λd和λq分别为dq轴电流在价值函数中的权重系数。
每个控制周期内,系统都将所有的8个电压矢量代入计算得到价值函数g的值,并获得使g值最小的最优电压矢量,作为下一个控制周期输入给逆变器的空间电压矢量。
2 弱磁控制
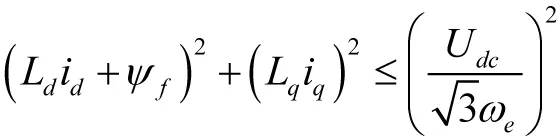
受三相逆变器直流侧电压、逆变器额定输出电流和电机本身额定电流的限制,表贴式永磁同步电机稳定运行时需要满足电压和电流的限制[9],在dq坐标系中表达如下:
(6)

(7)
其中,Ld和Lq分别是电机dq轴电感(Ld=Lq);Udc为直流侧电压;ω为电机转速;Ilim为逆变器额定输出电流和电机定子额定电流的较小值。
如图1所示,当电机在基速以下运行时,控制d轴电流为0,如OA段所示。当电机转速升高到基速以上时,由于电压的限制,若想转速继续上升,需要使d轴电流负向增大,使电机稳定运行于弱磁区域。首先运行于恒转矩区AD段,而后当电流受到限制后,运行于DE段,转矩开始下降,进入恒功率阶段。
当电机运行于弱磁区域时,采用超前角弱磁控制[10],如图1所示,定义:
(8)
在额定转速以下,超前角β=0;当转速超过额定值时,β开始负向增大,使得d轴电流负向增大,电机工作于弱磁区域。
3 仿真结果及分析
为使学生对理论知识有更深入的认识,选用的电机仿真实验参数如表1所示,在Matlab/Simulink中搭建系统的仿真模型,其控制框图如图2所示:
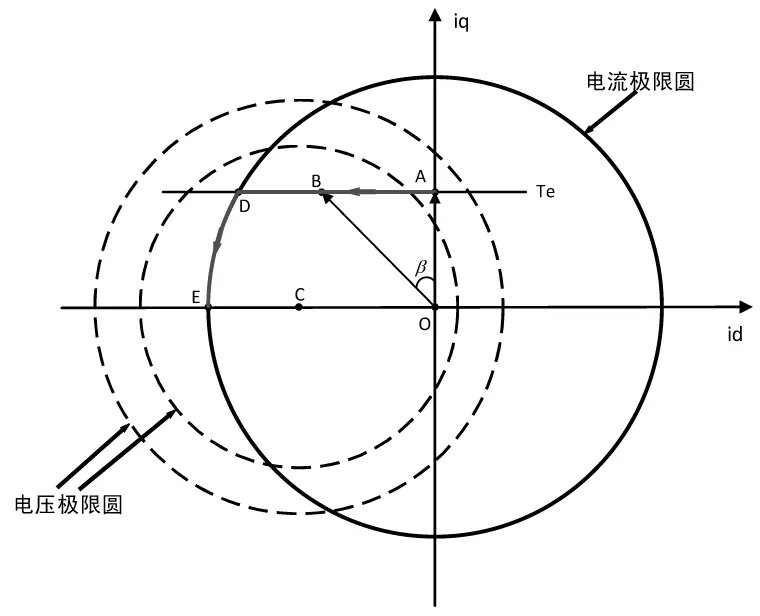
图1 电机弱磁运行分析

图2 系统控制框图
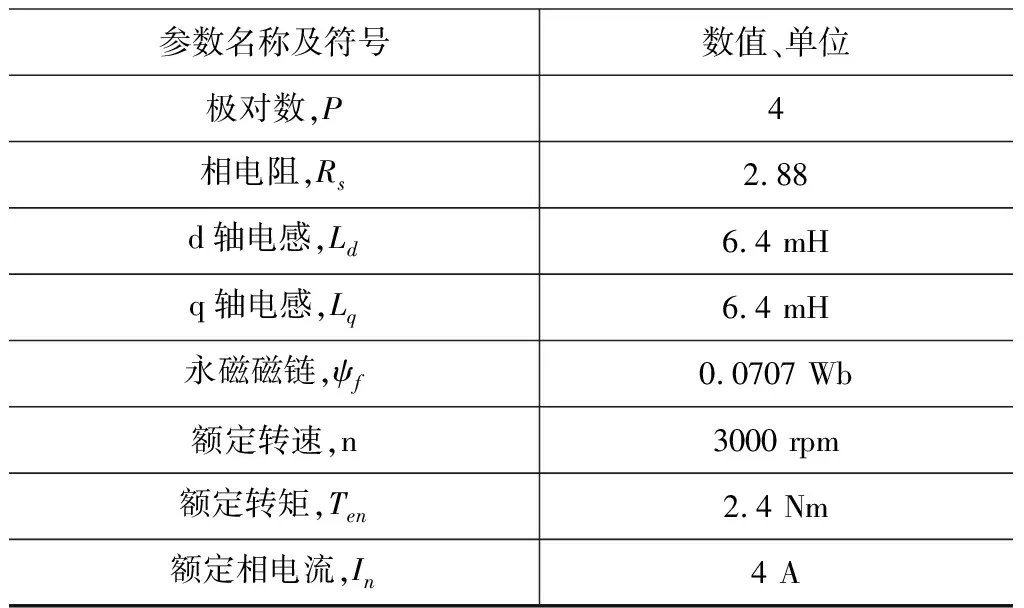
表1 电机参数
在t=0 s时,给定转速为1000 rpm,然后在t=0.2 s时将转速给定突变为5000 rpm,转矩恒定为1Nm,仿真结果如图3所示。
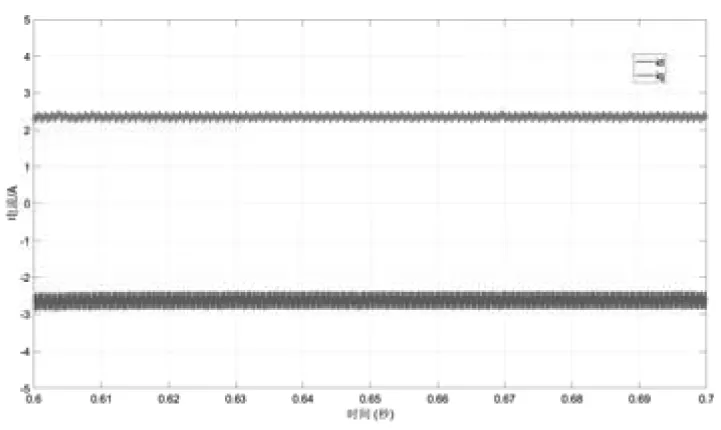
从图3(a)中可以看出,在基速以下运行时,由于PI控制的优越性,转速可以快速稳定地跟随给定,并且超调量也较小;而当转速超过基速进入弱磁阶段时,也可以较快地跟随给定,并保持稳定运行。电机的转矩输出如图3(b)所示,由于采用了模型预测转矩的调制策略,输出转矩可以稳定在给定的1 Nm附近,转矩脉动较小。图3(c)为电机的相电流波形,可以看出电流波形接近正弦波,谐波抑制效果比较明显。图3(d)为电机的dq轴电流波形,在基速以下时,d轴电流始终为0;而当转速上升到基速以上时,d轴电流负向增大,达到了弱磁增速的目的,验证了前述理论的可行性。
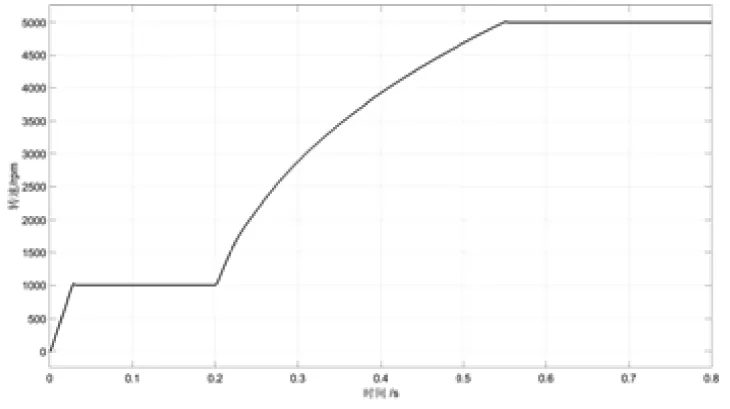
(a)转速波形
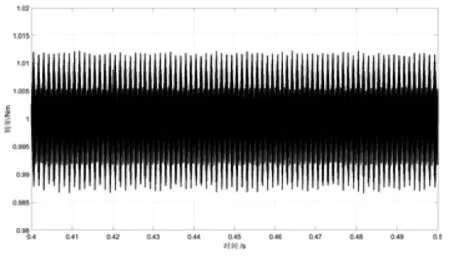
(b)转矩波形

(c)相电流波形
(d)id、iq波形图3 仿真波形
4 实验验证
为了使学生们能够深入了解前述控制方法在实际电机控制中的应用,加强学生们的实践能力并培养学生们对电机控制的学习兴趣,教学中将安排实验环节。搭建如图4所示的电机控制系统实验平台,由计算机、控制器、逆变器和采样电路、直流电源、电流调节器、永磁同步电机、磁粉制动器、示波器等组成。学生们在实验的过程中,一方面可以更加深入了解控制方法应用到实际电机驱动的过程,另一方面也可以熟悉实验设备的操作。
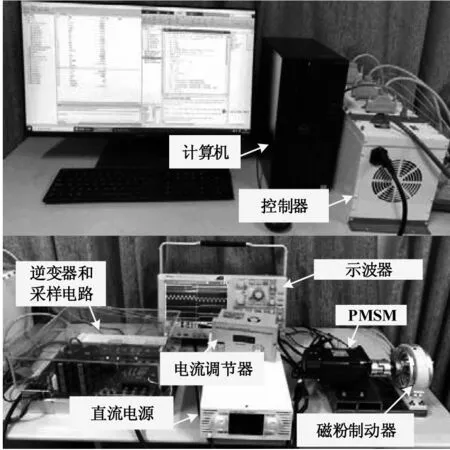
图4 电机控制系统实验平台
实验过程中得到的稳态实验波形如图5所示,分别为转矩波形(通道一)、A相电流波形(通道二)、B相电流波形(通道三)、C相电流波形(通道四)。从实验结果图中可以看出,转矩输出较为平稳,三相电流正弦度较好。为了验证该控制方法的动态性能,图6给出了转速突变时的实验波形,分别为A相电流波形(通道一)、转矩波形(通道二)、转速波形(通道三)。从图中可以看出,在转速突变时,A相电流和转矩也会随之发生变化,当转速重新稳定后,A相电流和转矩也会稳定下来。

图5 稳态实验波形
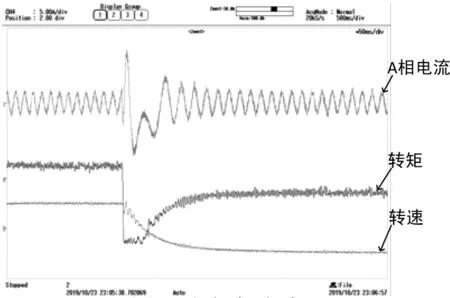
图6 动态实验波形
该实验操作较为简单,通过一个小组同学之间的相互配合可以较好地完成该实验。在实验过程中,学生们不仅在实践过程中加深了对理论的理解,也通过互相协作锻炼了自己的动手能力和团队合作能力,使学生们提出问题、分析问题、解决问题的能力得到了显著的锻炼。
5 结语
本文面向新时期教育部提出的“国家级一流本科课程”建设,提高人才培养质量的需求,针对“运动控制系统”教学中电机控制方法的问题,结合电机控制技术发展的热点,以三相表贴式永磁同步电机为对象,设计出一种结合模型控制电流预测控制和弱磁控制的电机控制策略,搭建出Simulink仿真平台和实验平台,进行仿真和实验验证。整个教学过程中,教师需要充分引导学生学习理论知识并从理论过渡到实践,学生则需要积极查阅相关资料,交流、分析和解决问题,对于高质量优秀工程人才的培养具有重要意义。
