智能羽毛球发球器的制备
2021-08-23张煜宸张大伟韦诗芹史海贝
张煜宸 张大伟 韦诗芹 史海贝
(广西科技大学 电气与信息工程学院,广西 柳州 545000)
随着竞技羽毛球运动技战术水平的不断创新、计算机性能的不断提高,对羽毛球运动员提出了更高的要求。专家认为从运动力学和羽毛球运动技术特点来看,击球过程中击球手臂相对于运动员整个运动过程具有保持身体平衡,提高身体移动速度,协助发力等作用。通过研究击球手臂在羽毛球运动击球过程中的作用和运动轨迹,一方面可对羽毛球爱好者提供科学有效的锻炼方法,另一方面通过计算机处理技术可以研制出相应的训练机器,我们通过基于PLC 开发发球装置俯仰角、方向控制器,研究控制信号传输、训练数据上传网络、机械装置组装,组装相关装置部件,开发出相应的智能发球机样机。
1 系统方案设计(图1)

图1 智能羽毛球发球器3D 建模图
1.1 球员位置检测方法的设计研究
通过摄像头搭建视觉检测系统,通过图像分割、特征提取、模式识别,结合摄像机坐标系内参标定,得出球员位置确定算法。
1.2 目标发球位置确定算法的研究
根据每次训练上传的历史数据,将球员手部训练动作进行分解,按挑球、扣杀等动作进行分类统计,通过模式识别确定球员力量、速度、耐力等训练阶段,结合训练模型提出目标发球位置确定算法。
1.3 设备开发
基于PLC 开发发球装置俯仰角、方向控制器,研究控制信号传输、训练数据上传网络、机械装置组装,组装相关装置部件,开发出相应的智能发球机样机。
2 系统硬件设计
2.1 系统执行机构设计
根据设计要求,系统执行机构分为两个部分:俯仰角控制执行机构和转盘控制执行机构,俯仰角控制系统我们采用三角结构,通过底端的推杆控制推动俯仰板的上下移动,底端转盘控制机构采用步进电机控制系统,系统执行机构设计实物图如图2 所示。

图2 系统执行机构
2.2 系统硬件选型
本系统选用西门子LOGO!做主控制器,控制推杆驱动器和步进电机,还有整个装置的LED、装置门的推杆、工业相机拍照的触发控制。电动推杆型号为JU-TGF-10(功率80W,24V 工作电压,行程350-400mm,推力2500N)、一个步进电机型号57HS09。旋转盘电机用来控制旋转盘的旋转,要求转速慢,控制简单,收到停止信号后能立即停止,停止时不出现因惯性产生的转动,避免产生不必要的误差。系统选用的定速电机,不仅符合转速要求,转矩也满足设计要求,而且控制方便,停止时不会产生惯性转动。
3 图像处理设计
3.1 图像处理设计要求
3.1.1 目标特征提取,我们采用帧差法提取目标特征,帧间差分法是一种通过对视频图像序列的连续两帧图像做差分运算获取运动目标轮廓的方法。当监控场景中出现异常目标运动时,相邻两帧图像之间会出现较为明显的差别,两帧相减,求得图像对应位置像素值差的绝对值,判断其是否大于某一阈值,进而分析视频或图像序列的物体运动特性。
3.1.2 训练数集的建立,因为BP 神经网络有很强的非线性能力,自主学习能力以及自适应能力,可对数据进行记忆训练,以测得的坐标以及读取的像素点进行训练。以读取的像素坐标(u,v)为输入值,可输出相应的位置(x,y),其输出值与期望值相近。将此对于输出的数据输入PC 端,作为控制执行机构的控制信号。
3.2 图像处理设计流程(图3)
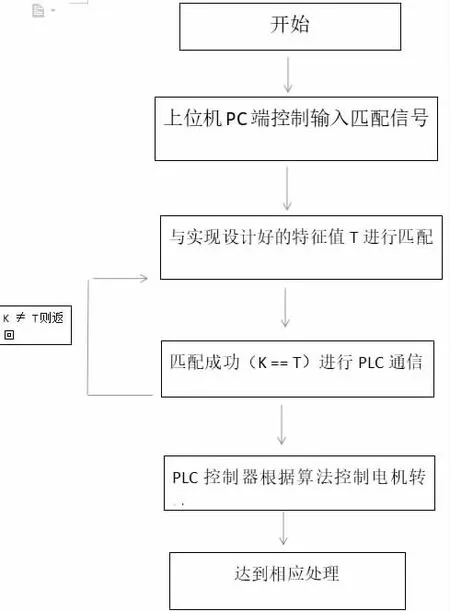
图3 图像处理流程图
在本设计中首先将图像进行二值化与取反,二值化阈值可以手动输入或者自动取阈值;接着采用中值滤波对二值化图像进行滤波处理。根据处理得出的二值图,提取出目标特征的区域图,求目标区域像素点数。然后进行差值处理,将视频图像转化为图像序列中的图像分别转化为二值化,每帧图像的二值图都与前一帧求差值,得出不同动作时期的差值图。然后将收集到的目标特征区域图进行标定,得到相应的像素点坐标后转化为数字信号输入到PC 端中。
图像处理有很多方法,这里因为我们是采用帧测运动的方式,可以选用帧差法算法,从其中提取到特征值,我们所选取的特征值是两幅运动图片之间的轮廓运动体态特征值,对特征值进行判断处理,将编写好的代码在PC 端中调整运行,对我们已经选取好的特征值进行判断处理,通过串口通信,将值再传送到PLC 中进行运行,PLC 作为从机控制器,PC 作为主位机运行,这样就可以将摄像头中观测到的特征值传送到PLC 中运行。
4 OPC 应用通信
4.1 通信方案
采用OPC 可以将MATLAB 与WINCC 进行数据传递,在MATLAB 上进行OPC 的设置,生成一个OPC 服务器。其主要步骤:在MATLAB 命令动作框上输入OPCtool,跳出OPC 设置界面,右键点击OPC Network 选择Add Host 确定后出现OPCServer.WinCC.1,右键点击后选择Create Client,右击“localhost/OPCSever.WinCC”选择Add Group,添加group1,可以更改其命名,改为Group,再右击选择Add Item,将WINCC 变量添加进Item 中就可以完成OPC 的设置,需要注意的是添加Item 前要将WINCC 激活。
除了可以在OPC 的设置界面进行设置外,还可以利用程序自动进行OPC 服务器的建立与连接,创建流程如图4 所示。

图4 OPC 创建流程图
4.2 WINCC 组态变量的设计
采用工控机为上位机系统的核心单元,以WINCC 的组态控制软件为平台基础,通过标准协议接口实现与PLC 的连接,在工作中满足远程监控和控制功能,需要在WINCC 上设置变量管理,将PLC 的变量传输到WINCC 上,达到在线监控。WINCC 组态监控设计的步骤:新建项目后打开变量管理,添加所需的驱动SIMATIC S7 Protocol suite,找到下面的MPI 右键点击新建连接,建立一个连接名,在右边的添加进变量。需要注意的是PLC 的变量按钮的变量地址选择位存储器M。其他的输入输出变量与编程软件step7 的符号表一致。
WINCC 变量记录设置步骤:点击WINCC 上的变量记录,打开变量记录界面,选择下方的归档的过程值归档,在左侧新建添加一个归档名称,再点机新建的归档名,在左侧的过程变量选择中加入变量管理的变量。至此,WINCC 组态变量设置完成。
打开WINCC 的全局脚本选择VBS-Editor, 新建动作项目,在右边写入VBS 脚本程序,程序如下:
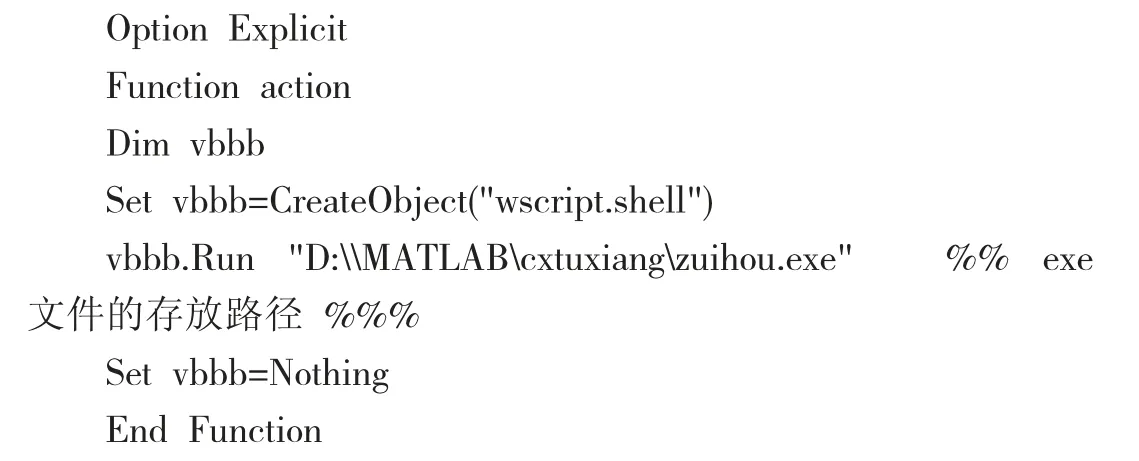
右键点击项目名选择信息/触发器,定时器触点与变量触发,定时器也分为周期性与非周期性;选择定时器周期性触发,设置触发延时后,保存退出即完成VBS 脚本的程序编写与设置。当WINCC 处于激活状态时,就会启动VBS 脚本工作,间隔时间到VBS 调用exe 文件。
5 结论
智能羽毛球发球器是一种利用机器视觉算法作为核心的一款智能设备,创新性的采用了图像处理,采用PC 端处理,PLC控制的方式,具有实用性高、效率高、自动化程度高的优良特点。
