面向罐车罐体内壁清洁的电磁吸附爬壁清洗小车设计
2021-08-21郭自海朱海清
郭自海* 陈 键 朱海清
(1.湖州市特种设备检测研究院 2.江南大学)
0 引言
汽车罐车是一种重要的特种运输车辆,在各种化工气液体货物运输领域被广泛应用。由于特殊的工作性质与环境,罐车每年都需进行全面检验以保障运输安全[1]。在年度检验前需对汽车罐车罐体内部进行清洗,其目的一是为了将罐体内部残留的固液体清除,降低罐体内部固液体挥发产生的毒性,保障工人进入罐体内部作业时的安全;二是为了清除附着在罐体内壁的铁锈、残留固体等影响后期罐体厚度测量的残留物,保证罐体检测的准确性。如果按每辆罐车每年清洗1.5次来计算,鉴于汽车罐车在市场上应用广泛,清洗工作量非常巨大,人工清洗费时费力[2]。
随着移动机器人技术的不断发展与成熟,将罐车内部清洗的过程变得更加自动化与智能化逐渐成为可能[3-4]。将移动机器人与罐体内壁清洁技术相结合的自动化清洁技术已逐渐成为未来罐体内部清洁的发展趋势。将爬壁机器人作为高压喷淋装置的载体,带动喷淋装置在罐体内壁自由移动,使其完成罐壁的全面清洗工作[5-6]。
1 小车的总体设计方案
1.1 爬壁小车整体尺寸
由于承压类汽车罐车罐体内壁清洁难度较常压类罐车更高,因此本文针对市面上存在的承压类汽车罐车来设计清洗小车[7]。对某款汽车罐车罐体及其内部构造利用Solidworks进行三维建模,如图1所示。

图1 罐车罐体三维模型图
图1中罐体的总体尺寸为 2 300 mm×15 000 mm,罐体内部设置了六块防浪板,用于减小内部液体晃动时带来的冲击,提高罐车行驶时的稳定性。这款罐车罐体内部的六块防浪板间距为0.33 m,相邻防浪板间的容积为15.48 m3,罐体的横截面面积为4.15 m2,每块防浪板面积为2.5 m2,防浪板上边缘到罐体顶部的距离约为500 mm。为了使爬壁小车能够从防浪板上边缘穿过到达另一段罐体,爬壁清洗小车的高度应小于500 mm。最后,罐体供人员出入的圆孔开口尺寸一般为DN 400 mm,所以爬壁清洗小车要想由该孔进入需保证其总长度与总高度都小于400 mm。由此可以确定爬壁小车的总体尺寸,具体如表1所示。
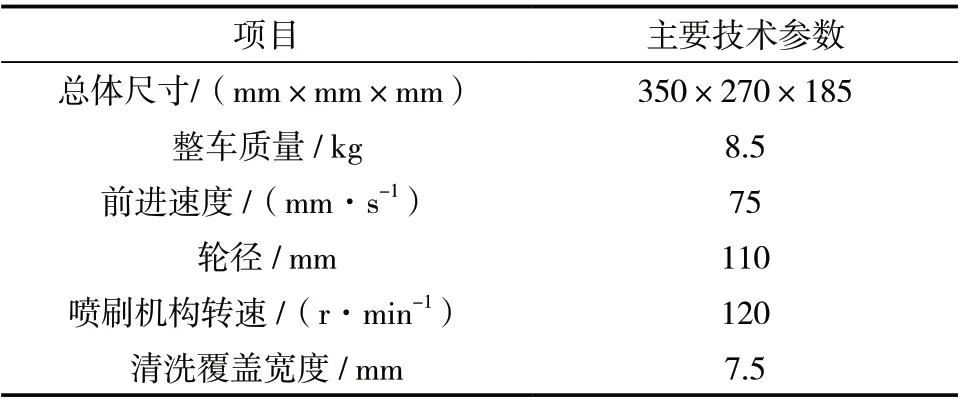
表1 清洗小车主要设计参数
1.2 清洗小车的整体结构
本文设计的汽车罐车清洗小车共包括七大部分,其具体结构如图2所示。

图2 清洗小车轴测图
(1) 承载车体
车体是容纳与安装其余六个部分的平台。除图2中所示的几大机构模块外,车体上还安装了防水罩。车身外壳还装配有照明系统,用于清洗小车视频拍摄的照明。
(2) 轮系驱动机构
轮系驱动机构用来产生和传递力矩,是小车运动的动力来源。清洗小车采用四轮驱动、差速转向的行走方式。车轮轮轴上的旋转编码器可测量爬壁小车的行驶速度。
(3)壁面磁力吸附机构
壁面磁力吸附机构主要由电磁铁组成。安装于底盘上的一圈电磁铁在通电的情况下可提供足够的吸附力,以克服在清洗及运动过程中使清洗小车脱离罐体壁面的作用力。
(4)壁面转换牵引机构
壁面转换牵引机构是小车在不同的工作面间完成壁面转换的牵引机构。
(5)清洁喷刷机构
清洁喷刷机构是爬壁清洗小车执行清洗任务的机构。
(6)视频拍摄与传输模块
视频拍摄与传输模块可监控爬壁小车在罐体内部的工作情况并将内部画面实时传输至罐车外部的上位机上。
(7)电力供应与运动控制模块
电力供应与运动控制模块为各种小车电力驱动元器件进行电力供应。另外小车的控制单元也安装在此模块中,使用单片机作为下位机接收上位机指令,控制各机构进行运动与工作。
2 关键零部件的设计
2.1 清洁喷刷机构设计
清洁喷刷机构是汽车罐车内部清洗工作的执行机构,也是整个爬壁清洗小车的核心部分之一。清洁喷刷机构既要有高压清洗的功能又要能够刮刷壁面。图3为新设计的喷刷机构。
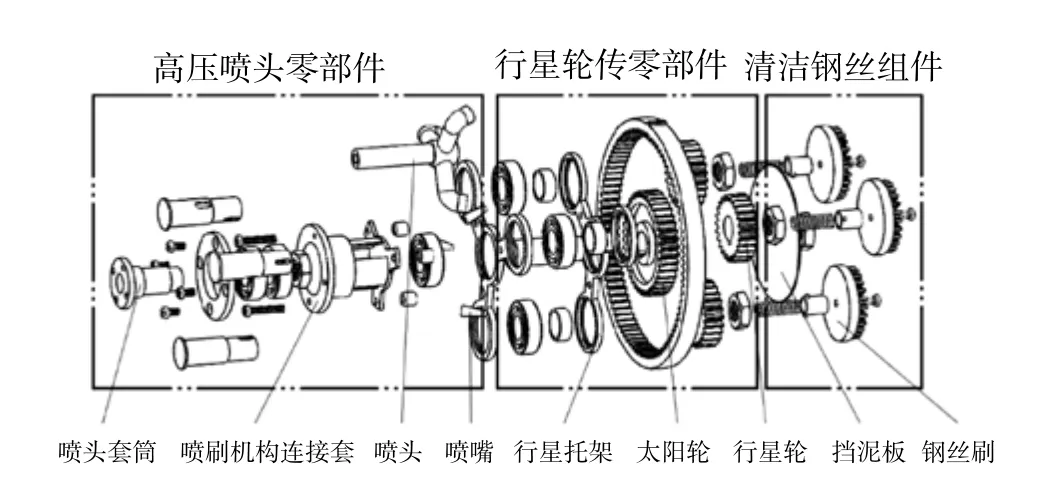
图3 喷刷机构爆炸视图
清洁喷刷机构由高压喷头零部件、行星轮传动零部件和清洁钢丝组件三个部分共同组成。在高压喷头部分,其一周安装有3个喷头,为了实现喷刷机构边冲刷边旋转,在设计时使喷嘴喷出的高压水流与壁面呈一定角度,在这3个喷嘴喷出水流产生的切向反冲力矩的作用下,喷头组件进行自旋运动。钢丝刷组件安装在行星轮轴上,旋转力矩通过行星轮传递到行星轮轴上,带动钢丝刷旋转从而清洁罐体内壁表面。通过这种结构设计最终实现清洗小车实现边冲刷边清洗的作业工况。
2.2 俯仰牵引机构设计
为了提高小车对罐体内壁的清洁质量,避免罐体内部壁面角度对于清洁工作的阻碍,爬壁清洗小车在罐体内部工作时需要经常进行壁面转换,从而清洁罐体内壁与内部防浪板,因此对小车的壁面转换辅助机构进行了设计。图4为清洗小车的俯仰牵引机构。

图4 俯仰牵引机构爆炸视图
牵引导向磁轮、磁轮驱动电机、牵引连杆、电机防水罩和俯仰舵机等共同组成了俯仰牵引机构。在俯仰牵引机构中安装有俯仰舵机,可提供机构俯仰旋转所需动力。其中,磁轮驱动电机可为产生力矩提供磁轮旋转的动力。为弥补清洗小车在壁面转换时产生吸附磁力的损失,牵引导向轮采用电磁铁制造,在壁面转换时利用电磁铁通断电来控制导向磁轮的磁性,以保障小车壁面转换的平顺性。图 5为爬壁小车壁面转换过程,其中俯仰牵引机构起到了至关重要的作用。

图5 壁面转换流程图
3 实验与仿真
清洗小车的前进速度是设计时的重要参数,其大小关系着清洁质量的好坏。速度过大时会导致单位面积的清洁时间短,清洁质量差;速度过小时会导致清洁速度过慢,清洁效率低下。因此对清洗小车设置合适的速度十分重要。为检验爬壁小车的清洗性能,现采用ADAMS软件对车体与喷刷机构进行仿真。
在ADAMS中将喷头部分模型简化为圆柱,车身简化为矩形块,如图6所示。喷头与车身间有一个旋转的相对运动,因此在喷头和车身间设置一个旋转运动副“JOINT1”;同样,在车体与地面间的相对滑动处设置滑动副“JOINT2”;为3个喷嘴出口处添加3个标记点并分别命名为MARKER9,MARKER10,MARKER11。还需对这个模型添加运动条件:设计的喷刷机构转速为2 r/s;故为转动副“JOINT1”添加720°/s的旋转运动“MOTION1”;喷刷机构清洗的有效覆盖宽度约为7.5 mm;根据设计参数为 “JOINT2”添加平移速度为75 mm/s的平动“MOTION2”;最后将仿真的时间设置为3 s,并设置计算步骤为1 000步后,进行仿真计算。
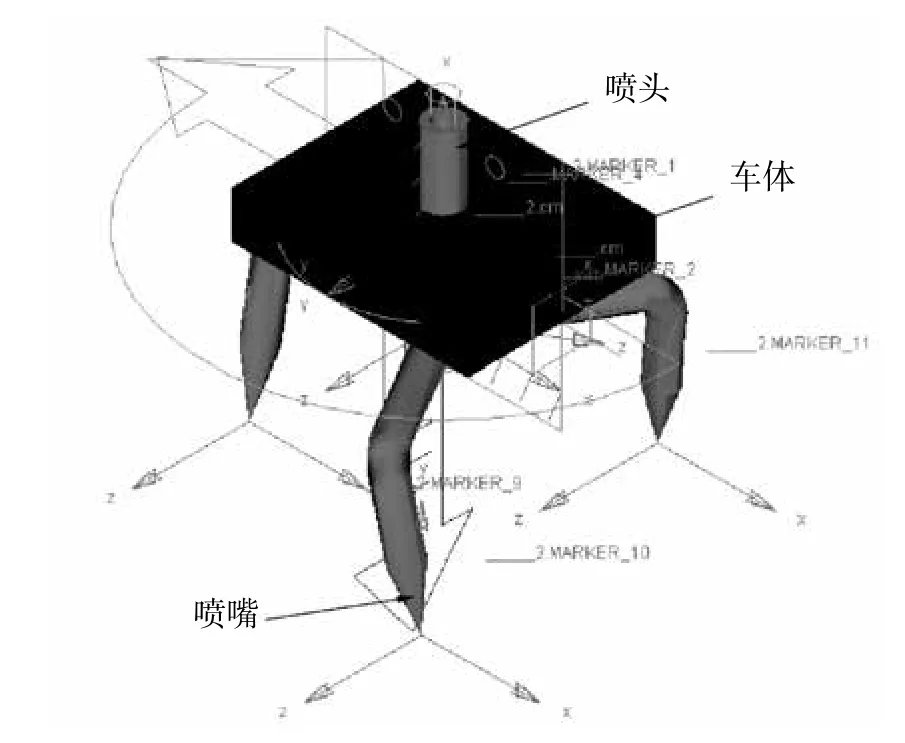
图6 仿真模型图
在ADAMS软件中测量标记点MARKER9,MARKER10,MARKER11相对于地面的位移,并绘制轨迹图,并将结果导入到Origin软件中,将数据合成后画出各自的轨迹,如图7所示。

图7 仿真轨迹图
由图7可以看出,当v=75 mm/s时,清洗轨迹确保了清洁区域的全部覆盖。由此验证了爬壁清洗小车的清洗功能。
4 结论
本文为解决高压罐车罐体内部清洁困难的问题设计了一款爬壁清洗小车,并利用虚拟样机技术对小车的清洁性能进行了验证。爬壁清洗小车有以下优点:(1)该爬壁清洗小车考虑到了罐车罐体内部具体情况,可在罐体内部存在不同工作面的情况下,通过俯仰牵引机构实现壁面转换,完成不同工作面的清洁任务;(2)设计的清洗机构可边冲边刷,能源消耗低,操作便利; (3)本小车可实现罐车罐体内壁清洁的智能化,降低了清洁人员的劳动强度,提高了清洁的效率与安全性。
