改进人工鱼群算法在无极绳绞车控制系统中的应用
2021-08-21吴姗姗
吴姗姗
(安徽新华学院,安徽合肥,230088)
0 引言
煤炭工业发展迅速,煤炭生产过程中面临着井下环境复杂,开采及运输困难等难题。因此,保证井下作业安全变得尤为重要。无极绳绞车作为煤矿辅助运输的重要方式之一,其承担着运送物料和设备至采煤面的重要任务。无极绳绞车的安全和稳定行驶是保证煤炭生产顺利进行的前提条件。传统无极绳绞车控制系统虽然能够实时监测无极绳绞车的运行情况,但是对位置参数的采样数据处理不准确,造成监测的误差,影响绞车的安全运行。人工鱼群算法是通过模拟鱼在水中的各种行为特点而提出的一种算法,其具有操作简单,容易实现的特点。由于人工鱼群算法存在寻优精度低等缺点,因此本文提出引入改进人工鱼群算法,利用该算法对无极绳绞车控制系统中的位置参数进行优化。实验证明,经过优化后的参数更精确,系统的安全性和稳定性更好,在很大程度上保证了煤炭生产的安全。
1 无极绳绞车控制系统的组成
无极绳绞车控制系统是由电动机,检测模块,控制模块,显示模块、报警模块以及保护模块等组成。系统通过检测模块实时检测无极绳绞车的运行速度,将采样的数据送入控制模块中。PLC作为控制模块的核心部分,将采样的数据进行分析处理,最终的处理结果由显示模块和报警模块输出。保护模块保护控制系统电路的安全。系统组成框图如图1所示。
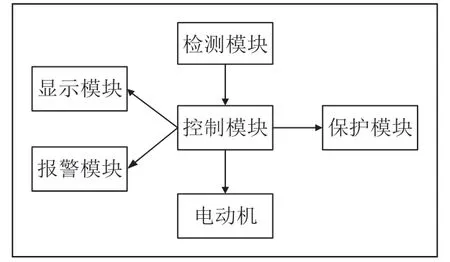
图1 无极绳绞车控制系统框图
2 改进人工鱼群算法
人工鱼群算法是模拟鱼在水中的一系列行为而提出的。鱼在水中生存,会跟随伙伴寻找食物,食物多的水域鱼的数量也会多。根据此特点,人工鱼群算法提出通过模拟鱼在水中觅食、聚群、追尾和随机行为来寻找最优解。但是人工鱼群算法存在寻优结果精度低和运算速度慢等缺点,因此本文提出一种改进的人工鱼群算法。该算法能够克服人工鱼群算法存在的问题,实现寻优。
■2.1 算法简介
改进人工鱼群算法(Attack Artificial Fish Swarm Algorithm, AAFSA)是指在人工鱼原有的觅食,随机,追尾和聚群行为中加入攻击行为。鱼在水中生存时,尤其在水中食物少的时候会因为争夺食物而发生攻击其他鱼的行为。此算法的核心思想就是本着遵循自然鱼群行为原则,适当增加聚的能力,同时增加随机行为,有利于跳出局部最优,实现全局寻优。
N为人工鱼的总数,人工鱼个体的状态为X= (x1,x2,… ,xn),步长为Step,视野为Visual,尝试次数为Try_numberTty_number,拥挤度因子为δ,人工鱼个体i,j之间的距离为dij=‖X i−Xj‖。
(1)觅食行为
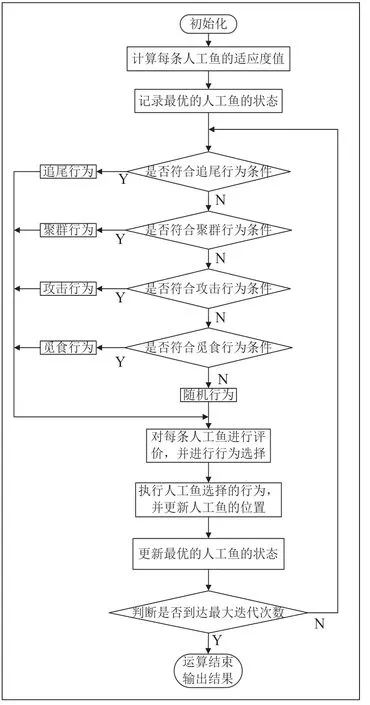
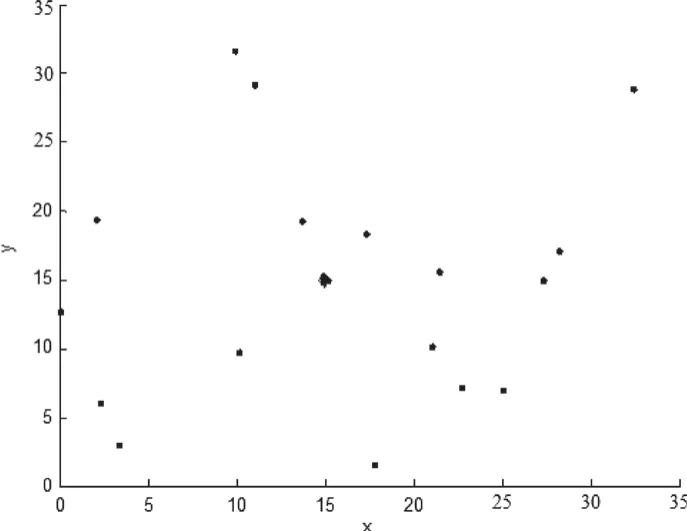
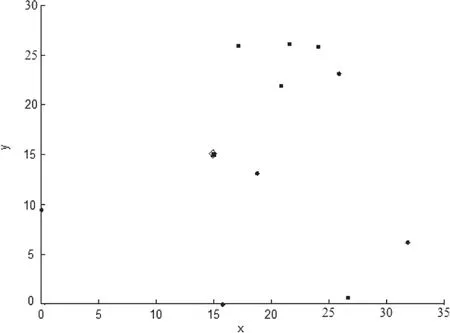
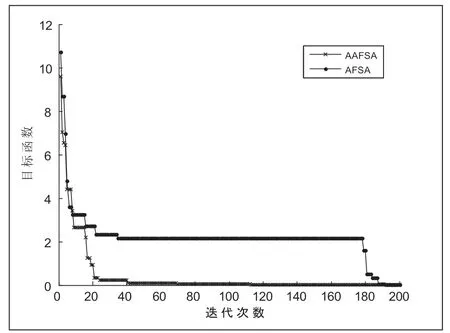
Xi记为人工鱼i当前状态,在其视野范围内随机选取一个状态记为Xj,假设求取极大值,则Yi>Yj(假设求极小值为Yi (2)聚群行为 Xi记为人工鱼i当前状态,此探索领域内(dij (3)追尾行为 Xi记为人工鱼i当前状态,Yj为当前搜索邻域内(dij (4)攻击行为 设Xi为人工鱼i当前状态,Yj为在当前搜索邻域内(dij (5)随机行为 就是在人工鱼的视野范围内随机选取一个状态后,朝该方向移动的行为。该行为简单易实现。 (6)公告板 用来记录最优人工鱼的状态。人工鱼经过一系列行为后会将最优的状态信息记录在公告板上,即公告板记录是人工鱼的状态信息。 AAFSA流程图如图2所示,首先初始化设置人工鱼群的各项参数,包括人工鱼的总数,人工鱼个体的状态,步长,视野,尝试次数,拥挤度因子等。计算每个人工鱼状态的食物浓度并将食物浓度最大的人工鱼的状态记录到公告板中。根据每个人工鱼的各个行为状态选择最优的行为作为最终的行为来执行,若符合追尾行为条件则执行追尾行为,否则判断是否符合聚群行为条件;若满足聚群行为条件则执行聚群行为,否则判断是否满足攻击行为条件;若满足攻击行为条件则执行攻击行为,否则判断是否满足觅食行为条件;若满足觅食行为条件则执行觅食行为,否则执行随机行为。将最优行为记录并更新公告板。若满足终止条件,即到达最大迭代次数时则停止运算输出结果,此结果为最优值。若不满足终止条件,则重新判断人工鱼选择执行的行为。 图2 AAFSA流程图 选取高维多峰函数F1,分别使用人工鱼群算法和改进人工鱼群算法对其进行参数优化测试,初始状态下两种算法的人工鱼位置分布相同。如图3所示。 图3 人工鱼的初始位置 图4 和图5分别表示人工鱼群算法和改进人工鱼群算法最后人工鱼的分布情况。图4中人工鱼分布较为分散,而图5中的人工鱼分布相对集中。通过对人工鱼最后分布情况的观察,引入攻击行为的人工鱼群算法的到达最优值的区域的人工鱼数量明显多于人工鱼群算法。 图4 AFSA人工鱼的最后分布 图5 AAFSA人工鱼的最后分布 选取另一个高维多峰函数F2,分别利用两种算法对F1和F2函数进行优化并分析收敛曲线。从收敛曲线对比中可以发现,具有攻击行为的人工鱼群算法在后期的收敛速度和精度都得到了加强。图6和图7是两种算法分别对F1和F2函数优化的收敛曲线比较。 图6 AFSA和AAFSA收敛曲线比较(F1) 图7 AFSA和AAFSA收敛曲线比较(F2) 通过实验仿真可以发现,具有攻击行为的人工鱼群算法在性能方面明显优于人工鱼群算法。在引入了攻击行为后,改进人工鱼群算法的执行时间明显缩短。因此利用改进人工鱼群算法对无极绳绞车控制系统参数进行优化,可以提高采样数据的精度,提高系统的可靠性和安全性。 本文提出利用具有攻击行为的人工鱼群算法对位置参数进行优化,解决了人工鱼群算法寻优存在问题。选取不同的高维多峰函数,分别使用人工鱼群算法和改进人工鱼群算法对其进行测试。通过实验对比发现,优化后的参数精度明显增大,系统的稳定性及抗干扰能力增强。将具有攻击行为的人工鱼群算法应用到无极绳绞车控制系统,系统的参数得到优化,提高参数的精度,能够有效地保证无极绳绞车井下工作的安全,对煤炭安全生产起到举足轻重的作用,增强了该控制系统在市场的竞争力。■2.2 算法流程图
3 系统参数的优化


4 结语
