一种电梯导轨参数测量仪的研发
2021-08-21林海坤

摘要:电梯导轨是电梯的重要组成部分,其轨距偏差、安装质量是影响电梯安全性和舒适性的重要因素之一。为了解决电梯导轨参数传统测量方法中存在的测量操作繁琐、精度低、难度大等缺点,基于CCD 传感器、激光垂准仪、单片机控制模块、蓝牙传输模块等研发了一种电梯导轨参数测量仪,主要由主动测量装置、随动测量装置、主控制器、上位机等4部分组成。基于Visual Basic6. 0软件开发了一套可进行同类型、不同尺寸电梯导轨测量的上位机,通过对测量的数据进行导轨三维实体建模并进行算法处理分析,可获得导轨距偏差、垂直度偏差、平行度偏差等数据。通过现场的检验比对表明,该电梯导轨参数测量仪的测量精度达到0. 1 mm,提高了检验员在导轨检验时的安全性和准确性。
关键词:导轨;CCD;激光;Visual Basic
中图分类号:TU857文献标志码:A文章编号:1009-9492(2021)12-0227-04
Development of an Elevator Guide Rail Parameter Measuring Instrument
Lin Haikun
( Quanzhou Branch of Fujian Province Special Equipment Inspection Institule,Quanzhou,Fujian 362000,China )
Abstract:Elevator guide rail is an important part of elevator. Its gauge deviation and installation quality are one of the important factors affecting elevator safety and comfort. In order to solve the disadvantages of cumbersome measurement operation,low precision and great difficulty in the traditional measurement methods of elevator guide rail parameters,an elevator guide rail parameter measurement instrument was developed basedon CCD sensor,laser vertical alignment instrument,single chip microcomputer control module and Bluetooth transmission module,which wasmainly composed of four parts:main measurement device,follow-up measurement device,main controller and upper computer. Based on VisualBasic 6. 0 software,a set of upper computer which could measure elevator guide rails of the same type and different sizes was developed. Through the three-dimensional solid modeling of guide rails and algorithm processing and analysis of the measured data,the data of guide rail gauge deviation,perpendicularity deviation,parallelism deviation and so on could be obtained. The field inspection and comparison show that themeasurement accuracy of the elevator guide rail parameter measuring instrument reaches 0. 1 mm,which improves the safety and accuracy of theinspector in the guide rail inspection.
Key words:guide rail;CCD;laser;Visual Basic
0 引言
隨着社会的发展,电梯成为生活中不可或缺的设备,而电梯导轨作为电梯重要组成部分,轨距偏差、安装质量是影响电梯安全性和舒适性的重要因素之一,电梯导轨距偏差、垂直度偏差是衡量电梯安装质量的一项重要指标。《TSG T7001-2009电梯监督检验和定期检验规则-曳引与强制驱动电梯》(含2号修改单)[1]规定如下:(1)每列导轨工作面每5 m 铅垂线测量值间的相对最大偏差,轿厢导轨和设有安全钳的T型对重导轨不大于1. 2 mm,不设安全钳的T 型对重导轨不大于2. 0 mm;(2)两列导轨顶面的距离偏差,轿厢导轨为0~+2 mm,对重导轨为0~+3 mm。当电梯导轨距偏差较大,安装质量较差时将直接影响着电梯运行的平稳性和乘客的舒适感、甚至电梯的安全运行。电梯导轨在制造和安装过程中难免会带来尺寸偏差,若偏差超过规定范围可能会对电梯正常运行带来安全威胁,甚至引发安全事故。目前电梯导轨参数常用的传统测量方法主要有直尺测量法、铅垂线测量法以及调道尺测量法等。但是在安装和检验时铅垂线测量需配合调道尺、游标卡尺或者钢直尺进行手动测量,测量效率低,测量精度受人为因素、环境因素以及单摆效应等因素会导致测量结果出现较大的误差;在电梯的测试和保养阶段,脚手架已经拆除,此时测量基准难以固定,测量误差明显增大。所以电梯导轨参数测量的传统测量方法存在测量操作繁琐、精度低、难度大等缺点[2]。因此研究一种能方便、简单、安全,自动化程度高,设备成本较低的电梯导轨参数测量仪具有较大的实用意义。本文主要采用单片机系统进行测量数据处理与显示,实现导轨参数的自动化测量。
1 工作原理
该导轨参数测量仪的系统原理如图1所示。检验员在测量开始之前通过数据处理系统(上位机)对主控制器系统进行初始化设置,设置导轨测量的初始位置为0,导轨数据偏差为0,主动测量装置和随动测量装置开始在轨道上测量,将测量的数值发送至主控制器通过无线传输模块传输至上位机进行建模、分析、判断等后续处理[3]。
2 系统设计
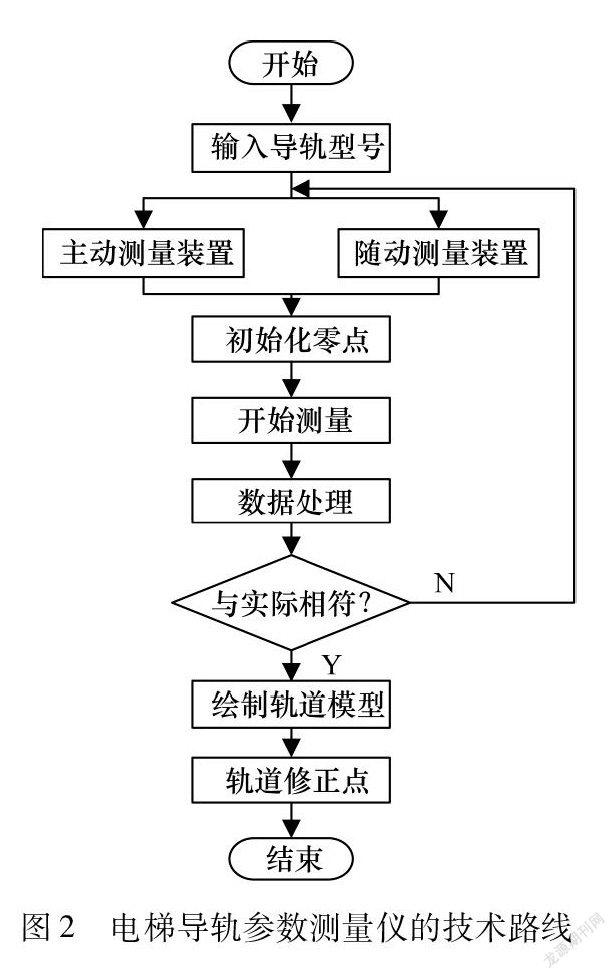
电梯导轨参数测量仪的结构如图2所示。该系统主要由主动测量装置、随动测量装置、数据采集处理系统等3部分组成[4]:(1)采用基于CCD 传感器、激光垂准仪、单片机控制模块的主动测量装置;(2)采用基于CCD 传感器、单片机控制模块的随动测量装置;
(3)无线传输模块采图2电梯导轨参数测量仪的技术路线用蓝牙传输,该测量仪对安装好的导轨及使用年限较久的导轨进行测量实验证、修正确定测量控制系统的较佳方案。
2. 1 主控制器
该装置采用单片机的最小系统作为系统的核心部分—主控制器[4],实现对主动测量装置、随动测量装置、蓝牙无线传输等。其流程为:参数初始化→判断上位机是否发送测量指令→发送测量指令→接收主动和随动装置测量的数据→通过蓝牙发送接收到的数据到上位机[5]。
2. 2 主动测量装置的设计
主动测量装置主要用于电梯导轨垂直度、两列导轨顶面距离偏差的测量,并将測量的数据经主控制器通过无线蓝牙传输至上位机进行数据处理。该测量装置通过磁力轮固定在导轨上,采用步进电机驱动测量装置在轨道上的往复运动,运用CCD 传感器[6]、激光垂准仪对轨道的垂直度偏差以及与随动装置进行配合对两列导轨顶面间的距离偏差进行测量[7],可实现测量精度为±0. 1 mm 的测量装置,其流程为:参数初始化→与随动测量装置建立通信连接和激光对准→判断是否接收到测量指令→开始测量→发送数据到主控器→结束。
2. 3 随动测量装置的设计
随动测量装置主要用于电梯导轨垂直度、两列导轨顶面距离偏差的测量[8],并将测量的数据经主控制器通过无线蓝牙传输至上位机进行数据处理。该测量装置通过磁力轮固定在导轨上,采用步进电机驱动测量装置在轨道上的往复运动,运用CCD 传感器对轨道的垂直度偏差、两列导轨顶面距离偏差进行测量,可实现测量精度为±0. 1 mm 的测量装置,其流程为:参数初始化→与主动测量装置建立通信连接和激光对准→判断是否接收到测量指令→开始测量→发送数据到主控器→结束。
2. 4 上位机的设计
2. 4. 1 上位机的主要功能分析
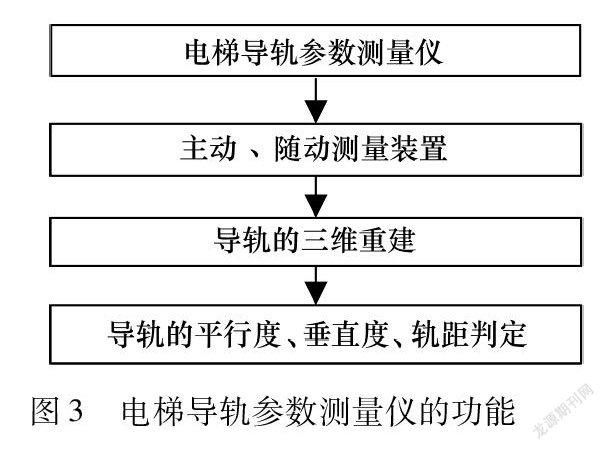
电梯导轨参数测量仪上位机的主要功能:(1)通过蓝牙传输实时导入主动和随动测量装置的数据;(2)对输入的数据进行预处理;(3)在预处理的基础上进行三维重建[9];(4)对重建的三维模型进行分析,得出电梯导轨平行度、轨距偏差、垂直度偏差。其功能如图3所示。
根据电梯导轨参数测量仪的功能及设计原则,其设计流程图如图4所示。程序开始导入通过蓝牙接收主动测量装置以及随动测量装置的测量数据;读取测量数据并对其进行预处理;通过对预处理的基础上进行导轨的三维重建;通过重建后的三维模型进行数据处理找出导轨的异常点;调用Matlab 显示导轨的三维模型,及在VB 界面上显示导轨异常点的相关信息[10]。
2. 4. 2 上位机的界面设计
上位机主要采用Visual Basic 6. 0软件开发了一套可进行同类型、不同尺寸电梯导轨测量的电梯导轨参数测量数据分析系统,可通过该上位机对安装好的电梯导轨进行测量,在测量的基础上对导轨三维实体建模并进行算法处理分析获得导轨距偏差、垂直度偏差、平行度偏差等数据。其主界面主要包括三维重建、测量数据、导轨测量数据曲线、导轨不合格点等模块[11]。具体如图5所示。
导轨的规矩偏差、垂直度偏差的主要程序段如下:
导轨的三维重建模块主要是通过主动和随动测量装置采集的数据调用Matlab 生成电梯导轨三维模型[12],其程序段如下:
unction [] = duandiandown ( a,b,c,d,e )%自己定义的绘图函数
读取的检测点的数据(x,y,z)
surf( xA,yA,zA );%绘图
hold on
X =[-1,-1,-1,-1,-1];
Y =[-0. 2,-0. 2,0. 4,0. 4,-0. 2];
Z =[0,max ( dateA (:,3)+100),max ( dateA (:,3))+100,0,0];
fill3( X,Y,Z,′w ′);%绘制的垂直参考面
hold on
plot3([000],[000],[00max ( dateA (:,3))],'r′);%绘制的垂直参考线
hold on%以上是A 导轨,以下是B 导轨
xB =[ dateB (:,1)+4,dateB (:,1)+4. 8,dateB (:,1)+5,dateB (:,1)+5,dateB (:,1)+4. 8,dateB (:,1) +4,dateB (:,1)+4];
yB =[ dateB (:,2),dateB (:,2),dateB (:,2)-0. 2,dateB (:,2)+0. 4,dateB (:,2)+0. 2,dateB (:,2)+ 0. 2,dateB (:,2)];
zB =[ dateB (:,3),dateB (:,3),dateB (:,3),dateB (:,3),dateB (:,3),dateB (:,3),dateB (:,3)];
surf( xB,yB,zB );
hold on
X =[5,5,5,5,5];
Y =[-0. 2,-0. 2,0. 4,0. 4,-0. 2];
Z =[0,max ( dateB (:,3)+100),max ( dateB (:,3))+100,0,0];
fill3( X,Y,Z,′r ′);
hold on
plot3([444],[00 0],[00max ( dateB (:,
3))],′r ′);
rotate3d on%3D 打开,可旋转
xlabel (′X 轴mm ′);ylabel (′Y 轴mm ′);zlabel (′高
度cm ′);grid minor%设置坐标轴名称和网格线
set ( gca,'ZLim ′,[ max ( dateB (:,3))-200 max
( dateB(:,3))+300]);%设置的坐标轴信息
set ( gca,′xLim ′,[-17]);
set ( gca,′yLim ′,[-55]);
2. 4. 3 系统应用实例和结果分析
本测量仪主要是针对电梯导轨迹偏差、垂直度偏差、导轨不合格点进行分析的测量仪。为了验证该测量仪的准确性,本文在相同条件下采用该测量仪与传统测量方法对同一个电梯井道的轿厢导轨偏差进行测量,该轨道长度为90 m,其结果如表1所示。
对表1的数据进行分析得其曲线如图6所示。由图可知,在传统方法与该测量仪在同等条件下,同等轨道测量的测量精度误差在0. 1 mm,且在18个测量结果中只有1个有测量误差,其余均一样,误差率为5%,误差在0. 1 mm。通过实验证表明该测量仪能较为可靠准确、安全高效地完成电梯导轨参数的测量,有效提高了电梯导轨参数测量的效率,有效提高了检验员在导轨检验时的安全性和准确性。
3 结束语
随着科技的发展,高层建筑的增加,电梯的速度也在逐渐加快。同时对电梯乘坐的舒适性和安全性也有了很高的要求。该测量仪通过采用CCD 模块、激光与上位机相结合的测量方式,获得电梯导轨的轨距、垂直度、平行度数据与现场检验进行对比具有较高的准确性,能够较为可靠准确、安全高效地完成电梯导轨参数的测量,有效提高了电梯导轨参数测量的效率,有效提高了检验员在导轨检验时的安全性和准确性,具有广阔的应用前景和良好的社会效益。
参考文献:
[1] TSG T7001-2009,电梯监督检验和定期检验规则-曳引与强制驱动电梯》(含2号修改单)[S].
[2]张译奇. 电梯轨距偏差测量仪的研制[D ]. 苏州:苏州大学,2014.
[3]王璇. 電梯导轨多功能检测机器人机构设计[J]. 中国特种设备安全,2019(9):34-35.
[4]郭炜. 电梯导轨性能检测装置的机械结构设计[J]. 中国电梯,2019(14):36-38.
[5]周磊. 电梯导轨弯曲变形校直理论模型仿真与实验研究[ D ]. 杭州:浙江大学,2010.
[6]杨付龙. 电梯导轨距及垂直度自动测量仪的设计[J]. 中国特种设备安全,2019(6):55-58.
[7] Peng Bo. Research on clor indentification by TCS230 color sensor combined BP neural network [J ]. FOOD&MACHINERy,2010(3).
[8] LushengLi. Self -organizingsecurityschemeformulti -hop wireless accessnetworks [ C ]//AerospaceConferenceProceedings2004 IEEE,1231-1240.
[9]吴文韬. CDH-1型激光高度测量仪的设计与实现[J]. 江汉石油职工大学报,2013(6):32-35.
[10]李江全. Visual Basic 串口通信与测控应用技术实战详解[ M ]. 北京:人民邮电出版社,2007.
[11]孟光,张文明. 微机电系统动力学[M ]. 北京:科学出版社,2008.
[12]单宝堂,沈庭芝,王廷豪. 多传感器图像采集处理系统的设计与实现[J ]. 传感技术学报,2009,22(2):235-239.
作者简介:林海坤(1986-),男,硕士研究生,研究领域为特
(编辑:王智圣)