无人机协助的多用户MIMO 毫米波网络混合预编码方案
2021-08-20纪澎善贾向东敬乐天
纪澎善,贾向东,2,路 艺,敬乐天
(1.西北师范大学 计算机科学与工程学院,兰州 730070;2.南京邮电大学 江苏省无线通信重点实验室,南京 210003)
0 概述
随着第五代通信技术(5G)的发展和商业化,B5G/6G 移动网络的前景引起了人们的广泛关注。无人机(Unmanned Aerial Vehicle,UAV)因成本低、灵活性高和易于部署的特性在无线通信系统中具有巨大潜力,成为B5G/6G 天地一体化网络的重要组成部分[1]。无人机、热气球等飞行器数量的增加,使得无人机基站(UAV Base Station,UBS)辅助的动态空中网络可以作为补充来改进传统静态地面结构[2]。毫米波(millimeter Wave,mmWave)通信是5G 蜂窝网络的关键技术,可以提升峰值速率和容量[3]。UAV 协助的毫米波通信可在未来的空地网络中提供大容量、长距离传输和更加灵活的覆盖范围[4]。针对毫米波路径损耗较大的问题,可以通过在发射端和接收端部署大规模天线阵列实现高波束成形增益,满足链路预算。同时,毫米波由于波长较短,天线元件的尺寸和天线间距较小,因此便于在尺寸受限的UAV 上封装大规模天线阵列[5]。然而,大规模天线阵列的部署会导致硬件复杂度高及能效低。
在大规模多输入多输出(Multiple Input Multiple Output,MIMO)系统中,通常使用模拟预编码、数字预编码、模拟/数字混合预编码3 种方案实现低复杂度和高数据速率传输[6]。全模拟波束成形通过模拟移相器(Phaser,PS)控制每个天线发射信号的相位。尽管模拟预编码方案的实现较简单且硬件成本较低,但其仅支持单数据流传输[7]。在传统MIMO系统中,通常采用数字预编码方案可获得很高的波束成形增益,但由于全数字方案需要大量的射频链路、较高的硬件成本且功耗大,因此不适用于无人机基站提供服务的通信场景。模拟/数字混合预编码方案能够以较少的射频链路数达到接近数字预编码方案的性能,实现系统性能与硬件成本的折衷[8],在无人机通信中mmWave 相控阵混合预编码为首选方案。
基于子连接结构的混合预编码方案受到了越来越多的关注。文献[9]基于子连接结构提出一种基于鸟群算法的混合预编码方案,使用改进离散鸟群算法求解最优预编码矩阵,具有较好的系统能效和误码性能。文献[10]提出一种新的子连接结构,每个子天线阵列与两个射频链路连接,实现了低复杂度下的高能量效率。与全连接结构相比,子连接结构可大幅降低硬件成本并提高能量利用率。然而,固定子连接的混合预编码结构虽然可以减少射频链路的开销,但由于其预编码矩阵形式的限制,系统性能会受到影响[7]。随着移动通信的快速发展,该结构不能满足日益增长的数据速率需求。全连接结构能够以增加少量PS 为代价,大幅提高系统速率。文献[11]通过最小化发送数据和被估计数据的差设计混合预编码器,降低了系统误比特率。文献[12]在数字编码处使用迫零预编码器,在混合mmWave系统中提出一种低复杂度的信道估计方法。文献[13]基于连续干扰消除方法,研究多用户场景下的混合预编码设计方案,减小了用户间的干扰。然而,目前有关UAV 通信网络场景下混合预编码方案的研究较少。文献[14]研究无人机协助的大规模MIMO混合波束成形方案,在满足所有用户速率要求的前提下,通过功率分配和轨迹优化方法提高能量效率。文献[15]在无人机网络下行链路中提出基于透镜天线阵列的混合预编码结构,利用机器学习交叉熵优化算法求解最优预编码矩阵,虽然获得了较高的能量效率,但是该结构需要在模拟域部署自适应选择网络,实现复杂度较高。本文针对UAV 协助的毫米波MIMO 通信网络,以优化系统频谱效率和能量效率为目标,设计全连接结构的混合预编码方案。
1 系统模型
1.1 信道模型
空对地系统模型如图1 所示。考虑无人机协助的多用户毫米波无线通信系统下行链路场景,由于旋翼无人机可以在空中悬停,因此将无人机作为空中基站为地面用户提供服务。由于毫米波频段频率较高且波长较短,便于在收发机处部署波束大规模天线阵列,因此假设无人机配备NUBS=M1×N1根天线的均匀平面天线(Uniform Planar Antenna,UPA)阵列和NRF个射频链路,U个地面用户设备(Ground User Equipment,GUE)分别配备NGUE=M2×N2根天线的UPA,其中U≤NRF<NUBS。
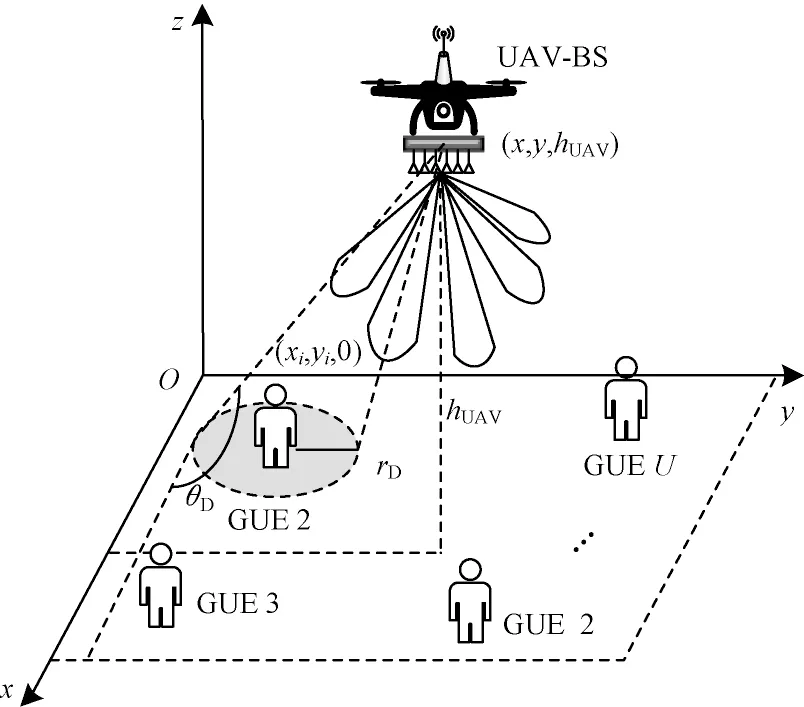
图1 空对地系统模型Fig.1 Air-to-ground system model
毫米波频段传播损耗严重,有效散射体数目有限,通常采用簇信道模型,假设第i个(i=1,2,…,U)GUE 的散射体数 为Li,L≪min(NUBS,NGUE)。假 设UAV 和GUE 之间仅存在一条有效传播路径,则UAV和GUE 之间的信道可表示为:



其中:(·)T表示矩阵的转置;λ表示信号波长;d表示阵元间距为
1.2 混合预编码架构
收发端混合预编码架构如图2 所示。为了实现网络性能与能耗的折衷,在UAV-BS 处使用模拟/数字混合预编码架构,在GUE 处仅使用模拟波束成形架构。UAV 基站将与用户数量U相等的S个数据流在发射端通过NRF×S的基带预编码器和大小为NUBS×NRF模拟预编码器并占用相同的时频资源发送给GUE,则UAV 基站发射信号可以表示为:

图2 收发端混合预编码架构Fig.2 Hybrid precoding architecture at transceiver

其中:s=[s1,s1,…,sU]T表示发送数据矢量。
在窄带宽衰落模型下,用户的接收信号为:

考虑到干扰影响,第i个用户的接收信号为:

其中:w表示用户端模拟预编码器NGUE×1的模拟合并矢量;假设总发射功率P被平均分配给所有用户,E[ssH]=表示服从均值为0、协方差矩阵为σ2IU的加性高斯白噪声;IU为U×U的单位矩阵。
2 无人机协助的多用户混合预编码方案
2.1 问题描述
在如图2 所示的共享阵列型混合预编码架构中,在UAV-BS处,使用模拟/数字混合预编码器,在GUE 处仅使用模拟预编码器。由式(6)可知,第i个用户的信号与干扰加噪声比(Signal to Interference plus Noise Ratio,SINR)为:


其中:B表示系统带宽。
本文方案中的总能量消耗为:

其中:NRF和NPS分别表示RF 链路数和移相器数量;Pt表示发射功率;PRF为RF 链路的能量消耗;PPS表示移相器的能量消耗。能量效率被定义为速率和总能量消耗之比:

为了最大化系统速率,设计混合模拟/数字预编码和模拟合并矢量,表示为:

其中:‖ ‖·F是矩阵的Frobeinus 范数。问题式(12)是具有非凸约束的多元联合优化问题。本文将问题式(12)的求解分为:1)确定模拟预编码矩阵FRF和模拟合并矢量w;2)对数字预编码矩阵FBB进行求解,以消除用户之间的干扰。
2.2 带外信息协助的模拟预编码器和合并器设计
在如图2 所示的混合预编码架构中,模拟预编码器用于调整由发射端产生的发射波束,使其生成对准GUE 的定向波束,其功能通过恒模拟移相器实现。模拟预编码矢量的幅值恒为其偏转角度为GUE端模拟合并矢量wi的幅值恒为,其偏转角度为
由于射频硬件的限制,例如射频移相器必须使用量化的角度,模拟预编码矢量和组合矢量只能取一定的值,这些矢量需要从有限大小的码本中进行选择,因此为使第i个GUE 的链路增益最大,模拟预编码矩阵和组合矢量的优化问题可表示为:

受文献[16]启发,通过无人机和用户的先备位置信息,先确定波束角度范围,再通过式(2)和式(3)设计天线阵列响应向量。如图1 所示,在构建的三维系统模型中,假设无人机在固定高度hUAV飞行,则无人机位置坐标为(x,y,hUAV)。将以用户为中心、半径为rD的圆形区域作为位置信息区域,则区域的某点为第i个(i=1,2,…,U)地面用户位置坐标(xi,yi,0),UAV基站与GUE 之间的距离为在UAV 毫米波通信网络模型中,UAV 基站配备UPA 实现3D 波束成形对GUE 进行覆盖。对于第i个GUE,仰角和方位角分别为[17]:

GUE 先备的AOA 和AOD 范围区域即为先备位置信息,部分非最佳的仰角和方位角信息可以利用先备信息进行排除。有关GUE 位置信息直接通过GNSS 或间接由宏基站提供给UAV 基站,以便UAV 基站实现快速波束成形过程[18]。在此基础上,UAV 基站可以提升信道增益和信道估计时间。由以上公式推导以及图1系统模型可得到如下GUE 先备的AOA 和AOD 信息:

本文基于文献[19]提出的分层多分辨率码本方案设计波束成形向量。基于设计好的码本可以为波束成形过程找到最佳的导向向量,相较穷举搜索方式,分层搜索波束最佳方向的复杂度更低、性能更佳。模拟波束导向码本通过在指定方向上对天线阵列的响应向量进行采样而产生备选预编码。毫米波信道的稀疏性和基于带外信息协助的波束成形形成的窄波束,使得数字预编码方案接近最优性能。UAV 基站处模拟预编码器码本F 中的向量由具有量化角度的阵列响应向量组成。GUE 处模拟预编码器码本W 中的向量由具有量化角度的阵列响应向量组成。
2.3 数字基带预编码器设计
为了进一步提升系统频谱效率,减少用户间干扰,利用卡尔曼滤波算法对数字预编码器进行设计。卡尔曼滤波器由一系列递归数学公式描述,它提供了一种高效计算方法来估计过程的状态,并且能使估计均方误差最小。
本文基于最小均方误差思想以及卡尔曼滤波算法[11]对数字预编码器进行设计。卡尔曼滤波算法的思想为:以t-1 状态的最优估计xt-1为准,对t状态的状态变量进行预测,同时对该状态进行观测得到观测变量,再用观测量对预测向量进行迭代修正,从而得到t状态的最优估计[20]。
假设UAV 基站已知信道信息状态,由信道互易性可知,基站根据接收信号估计上行并转置得到下行信道特性。等效信道矩阵为GUEi的等效信道为在第t次卡尔曼迭代过程中,UAV基站端发送数据s(t),令其为观测向量。若GUE 接收端数据为yr,i(t),则第t次迭代时,发送数据和接收数据之间的均方误差为,令其为训练向量。数字预编码器部分设计的优化问题为:

为求解数字预编码器FBB,基于卡尔曼滤波算法,假设FBB(n)为状态矩阵,测量更新方程为:
其中:K(t)为卡尔曼增益;G(t)为噪声协方差矩阵;V(t)为FBB(n)的方差。
在测量更新方程计算完成后,再重复整个计算过程,上一次计算得到的后验估计被作为下一次计算的先验估计。通过不断的迭代修正得到FBB的最优解。因此,问题式(18)满足约束条件FBB的解为:

3 仿真与结果分析
为验证本文混合预编码方案的有效性,对其进行仿真分析,同时与模拟预编码方案、数字预编码方案和迫零混合预编码方案进行对比。仿真参数设置如表1 所示。

表1 仿真参数设置Table 1 Setting of simulation parameters
图3 给出了当GUE 数量为6 时不同信噪比(Signal Noise Ratio,SNR)下不同方案对应的系统频谱效率变化曲线。可以看出,所有预编码方案的系统频谱效率随信噪比的增大而增大。数字预编码方案频谱效率最高,但该方案需要大量的射频链路数,硬件代价巨大。除了数字预编码方案外,本文提出的带外信息协助的混合预编码方案性能最佳,优于迫零混合预编码方案,且频谱效率性能接近数字预编码方案。同时,随着信噪比的增大,本文方案与迫零混合预编码方案性能差距增大,说明本文方案在高信噪比场景下具有更好的性能。

图3 频谱效率随SNR 的变化曲线Fig.3 Curve of spectrum efficiency with SNR
图4 给出了当信噪比固定为10 dB 时不同用户数量下不同方案对应的系统频谱效率变化曲线。可以看出,随着用户数量的增加,4 种方案的频谱效率均呈现下降趋势,本文方案性能接近数字预编码方案,且优于迫零混合预编码方案。同时,本文方案与迫零混合预编码方案的性能差距随着用户数量的增大而逐渐增大,迫零混合预编码方案的性能随着用户数量增多逐渐变差,退化严重。这是因为当用户数量增加时,用户间干扰增加,本文方案可以有效减少用户间的干扰,所以性能最优。

图4 频谱效率随用户数量的变化曲线Fig.4 Curve of spectrum efficiency with the number of users
图5 给出了当用户数量为6 时不同方案下能量效率随信噪比的变化曲线。可以看出,除模拟预编码方案以外,本文方案在能量效率方面表现出最优的性能,频谱效率最优的数字预编码方案能量效率最差,这是因为射频链路单元消耗了大量能量。

图5 能量效率随SNR 的变化曲线Fig.5 Curve of energy efficiency with SNR
图6 给出了当SNR 为10 时不同方案下用户数量随能量效率的变化曲线。可以看出,随着用户数量的不断增大,系统能量效率不断降低。这是因为用户数量的增加使得需要的射频链路数量增加。当用户数量为2~4 时,本文方案与迫零混合预编码方案具有几乎相同的能量效率。当用户数量大于4 时,本文方案的能量效率优于迫零混合预编码方案。数字预编码方案的能量效率最低且随用户数量的变化波动较小,这是因为在数字预编码方案中,射频链路数量与发射天线数量相同,用户数量对射频链路数量影响较小。综上所述,本文方案适用于多用户通信场景,且具有较高的系统频谱效率与能量效率。
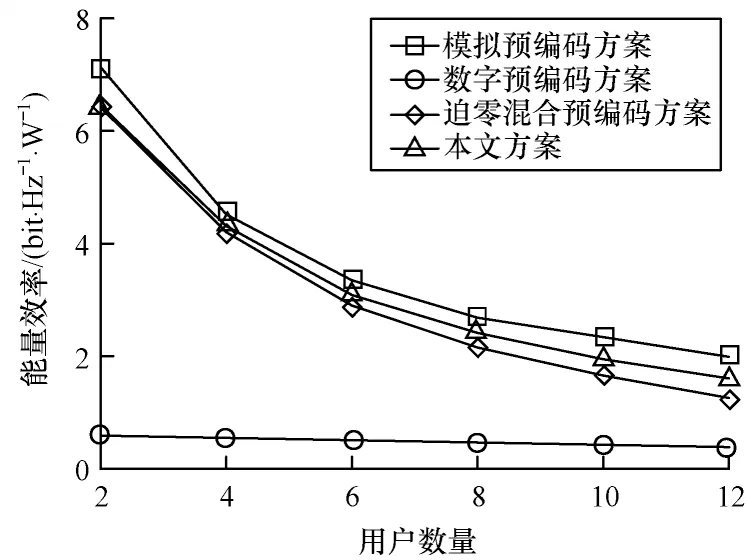
图6 能量效率随用户数量的变化曲线Fig.6 Curve of energy efficiency with the number of users
4 结束语
为提高无人机协助的mmWave 大规模MIMO系统的频谱效率和能量效率,本文基于全连接结构提出一种混合预编码方案。对于混合预编码器的非凸约束优化求解问题,先计算模拟预编码和模拟合并矩阵,再在发射端设计数字基带预编码器。仿真结果表明,该混合预编码方案能够有效调整混合结构中的预编码矩阵,在系统频谱效率和能量效率方面相比模拟波束成形方案、数字预编码方案和迫零混合预编码方案更具优势。后续将对运动状态下的无人机进行飞行轨迹和预编码的联合优化,进一步提升移动通信网络性能。
