车联网中协作数据分发方案研究
2021-08-20丁鹏举梁吉申罗铖文蒋建春
林 峰,丁鹏举,梁吉申,罗铖文,蒋建春
(1.重庆邮电大学 自动化学院,重庆 400065;2.重庆邮电大学 通信与信息工程学院,重庆 400065;3.陆军工程大学通信士官学校,重庆 400035)
0 概述
智能网联汽车作为智能交通系统(Intelligent Traffic System,ITS)不可缺少的重要组成部分[1],通过配备无线通信设备,即车载单元(On Board Unit,OBU),可以完成交互通信、感应以及计算,同时将交通工具及路边设施通过V2V(Vehicle to Vehicle)、V2I(Vehicle to Infrastructure)等通信技术有机结合,能够大幅改善出行安全性和效率[2]。网络中的车辆和路侧单元(RSU)等资源节点具有很好的数据文件存储和应用数据计算等能力,并且路侧单元相对于车辆节点,具有更广阔的通信范围和更大的通信带宽,可同时容纳覆盖范围内的多个资源节点接入其中进行信息数据的下载[3]。这些信息数据不仅包括天气、地图等应用信息,也有道路交通状况或警报等安全信息[4]。但是,由于RSU 部署成本问题、车辆的高移动性及RSU 通信范围有限,很难为所有车辆节点提供无缝覆盖[5],对于过大的数据会发生传输中断的情况。为此,本文提出一种协作数据分发方案,利用网络中双向车辆和RSU 等资源节点的传输能力,为目标车辆传输数据,并分析资源节点的竞争接入与传输以及转发完成时间等影响数据传输的因素,使得车辆行驶在盲区时能持续进行数据下载,减少盲区数据传输中断的影响。
1 相关研究
对于V2I 通信的协作数据分发即通过协调多个路侧单元对用户进行协助下载,而对于V2V 通信的协作数据分发则是通过多个协助车辆为节点提供协助数据下载。2 种协作方式对用户下载数据量确有提升,但由于2 种通信方式连接的间歇性,一些资源密集型应用的数据分发仍有很大限制。因此,许多研究将重点转移到V2I 和V2V 协作通信中,通过多个路设与车辆的协作,从而提升协作数据分发的性能[6]。
在协作数据传输和下载方面,文献[7]提出车辆存储-携带-转发机制,通过选取同向及反向车辆进行辅助目标车辆的数据传输,但是同向和反向只选取了2 个中继辅助接点,没有充分利用V2V 通信资源。文献[8]考虑具有延迟容忍的应用场景,提出一种协作通信策略,提升了具有有限流量密度的车载网络的吞吐量,并对车载网络基础架构的最佳部署以及协作通信策略的设计有指导作用。文献[9]为减少间歇性车辆网络中的数据下载延迟和回程链路流量,提出一种车辆与RSU 合作的内容中继和预取方案,根据车辆的移动性信息,通过下载和中继时间选择中继车辆,以在RSU 覆盖范围内实现内容转发,并对下一个到达的RSU 进行数据预取,以实现即时数据下载。文献[10]为了满足在车载网络中需要高吞吐量和低延迟的服务和应用,提出一种在同类车辆网络中的V2V、V2I 协作下载机制,并基于车辆移动性预测和节点间吞吐量估计,构造了存储时间聚合图计划传输方案,然后设计一个迭代贪婪驱动算法以导出次优解决方案,从而以近似最佳的方式分发给车辆。文献[11]针对大文件的下载和传输,提出一种车载网络协作通信策略,通过协调反向协助车辆和相邻RSU 进行数据下载,从而最大化目标车辆的吞吐量。文献[12]为了减少高清地图传输时的网络功耗,同时考虑到功率效率和通信效率,提出一种协作的V2I、V2V 传输方案,以实现低功耗的高速高清地图传输,并在RSU 和车辆之间自适应分配功率,同时为减小解码错误概率的影响,采用了更接近现实的传输速率的估计式。在协作内容分发与缓存方面,针对时延敏感型任务,文献[13]提出一种预测性缓存数据分发策略,基于接收信噪比门限及相对速度距离等参数对RSU 和周边车辆的文件传输时延进行预测,并选取时延最小的节点作为数据传输源。为减少通信开销,提高系统吞吐量,文献[14]在协作数据分发调度策略中考虑了信道预测,同时利用递归最小二乘算法降低了计算复杂性,提高了数据分发效率,有效地减少了数据分发的延迟。
2 协作数据分发方案
目前多数研究关注于吞吐量和时延,但忽略了对于双向节点资源的充分利用,以及数据转发过程中目标车辆集群内部的车辆之间的数据流动问题。因此,对于资源节点,本文考虑选取多个双向车辆节点,分析车辆与目标车辆之间速度等参数对数据传输量的影响,使资源节点得到充分利用,同时增加目标车辆盲区数据下载量。对于数据转发过程中集群车辆之间的数据流动问题,分析同向协助车辆及目标车辆的竞争传输对数据转发带来的影响,使之更加合理。并且,当前协助下载根据应用场景大致分为高速公路场景和城市道路场景[15]。城市道路结构复杂,车辆行驶速度不一,轨迹多变,车流密度大,在这种情况下的研究一般围绕车辆行驶轨迹和路侧单元RSU 的部署展开。在高速环境中,由于RSU 部署稀疏,车辆行驶速度较为稳定,车流密度不大,车辆轨迹易预测,因此该场景中的协助下载主要是研究如何提升相邻RSU 之间的盲区利用率以及协助车辆的选择。
本文针对高速公路场景,结合V2I、V2V 通信,提出一种两者协作进行数据分发的机制,建立理论分析框架,推导目标车辆可获得的数据量,从而提升盲区利用率,减少盲区数据传输中断的影响。其主要思路是:通过M/D/C/C 排队系统模拟车辆经过路设范围的过程,当目标车辆进入RSU 覆盖范围时,通过竞争接入的方式,与RSU 进行V2I 通信从而获得所需文件的部分数据,若在目标车辆驶出RSU 覆盖范围时还未完成文件下载,则通过同向协助车辆进行V2V 通信进行辅助下载,其中协助车辆经过RSU时为目标车辆下载部分数据,并且愿意为目标车辆提供帮助的一个集群,在经过盲区时将所下载数据竞争性地转发给目标车辆。同时,充分利用反向行驶车辆的资源可用性,由目标车辆行驶方向的下一个RSU 选定反向协助车辆,并下载部分数据,在盲区与目标车辆相遇时通过转发的方式传输给目标车辆,进一步增加目标车辆下载数据量。
2.1 模型建立
2.1.1 系统模型
本文系统模型考虑双向高速道路,如图1 所示,RSU 部署在路侧,并具有相同间隔d,2 个RSU 之间盲区距离为U,且RSU 可以通过无线或者有线连接到核心网。每个车辆进入到RSU 覆盖范围内时将向RSU 注册自身信息,包括ID、车速以及进入该RSU的时间,则RSU 中应有注册信息维护列表List=并能实时进行更新。当目标车辆在RSUi覆盖范围内发起下载请求后,RSUi根据同向车辆数量与车辆停留时间计算同向协助车辆以及目标车辆可下载的总数据量,将同向车辆未下载完的部分数据文件分发给RSUi+1,然后再由预取到剩余数据文件的RSUi+1根据车辆注册参数选定合适的反向协助车辆进行目标文件的片段下载,在经过盲区时对目标车辆进行辅助转发。本文主要关注目标车辆在1 个下载周期(从驶入第1 个RSU 到驶出第2 个RSU 的覆盖范围)内的各个阶段所获取数据量大小以及转发时间,并给出具体分析。
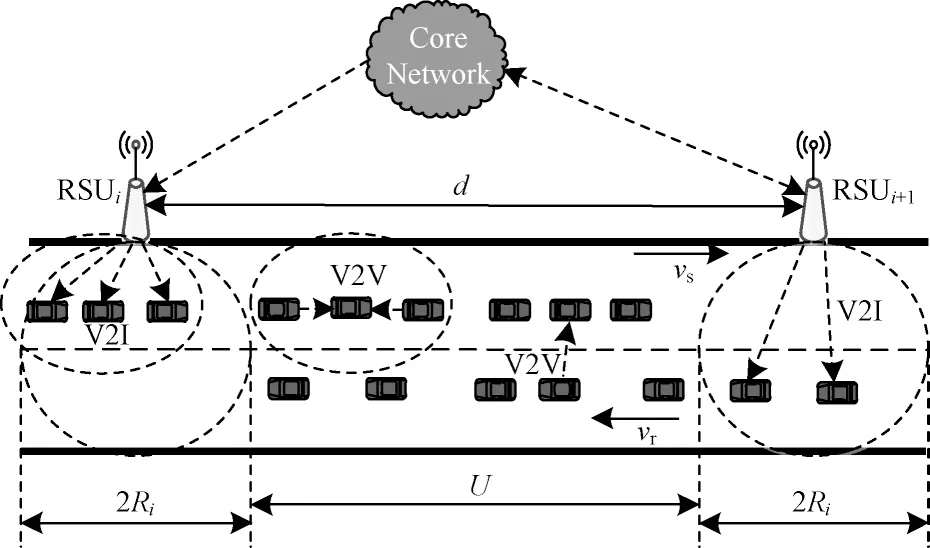
图1 本文系统模型Fig.1 System model in this paper
2.1.2 移动模型
本文假设目标车辆行驶方向车流密度为ρsveh/m,反向车流密度为ρrveh/m,车辆到达近似服从参数为λs和λr的泊松分布[16],与目标车辆同向车辆车速为νs,反向车辆车速为νr。根据Greenshield宏观交通流模型[17],可知到达率与速度存在如下线性关系:

并且基于上述关系,有:

其中:νf表示道路畅通时车辆速度;ρjam表示交通堵塞时车辆密度。为避免干扰其他车道交通流行驶,将低速车道作为协助下载车道,同向及反向车辆可共同参与协助下载及转发,同时设RSU 覆盖半径为Ri,车辆通信半径为Rν,相邻RSU 间隔为d,间隔中无法被RSU 覆盖到的区域称为盲区,用U表示,则U=d-2Ri。
2.1.3 通信模型
对于V2I 通信,参考IEEE 802.11b 协议,通信过程采用自适应的V2I 传输速率模型[5],其中在车辆经过路设覆盖范围时,考虑RSU 和车辆之间的距离对传输速率的影响,即传输速率随距离增大而减小,并呈对称的阶梯状。如图2 所示,即划分为左右对称的7 个区域,则各个区域相对应的传输速率为集合B={B1,B2,…,B7}。具体区域的长度及其对应的传输速率数值在后续参数中给出。并且考虑理想的MAC 协议,RSU 的时空资源平均分配给覆盖区域内的车辆[16]。

图2 自适应传输速率的区域划分Fig.2 Regional division of adaptive transmission rate
对于V2V 通信,考虑恒定的数据传输速率,主要关注于交互时间对传输数据量的影响。车辆之间通过配备车载传感器可以进行距离感知,以及与其他车辆进行车速、位置等信息的交换,因此,车辆节点之间的欧式距离只要不大于通信半径Rν即可进行通信[18]。并且车辆为单天线模式,不能同时进行信号的收发工作,因此车辆在同一时刻仅能与单个通信设备进行数据交换,而且由于RSU 连接至核心网可进行网络资源下载,因此目标车辆在RSU 覆盖范围内将优先与RSU 建立通信连接,并进行数据下载,在驶出RSU 覆盖范围时才与协助车辆建立V2V 通信。
2.2 阶段分析
图3 所示为1 个下载周期内协助下载流程。

图3 协助下载流程Fig.3 Procedure of assisting download
协助下载流程主要有以下3 个阶段:
阶段1主要关注于目标车辆如何协调同向车辆形成协助集群。目标车辆首先对通信范围内的车辆广播协助下载请求,协助车辆接收到请求之后,向目标车辆发送确认消息。至此,协助下载车辆将加入集群,并且车辆单元OBU 可实时获取行驶车辆的信息。集群车辆经过RSUi时将根据自身情况下载部分数据,以在经过盲区时转发给目标车辆。
阶段2RSUi协调同向车辆数量及可下载的数据量,将目标车辆请求文件分为2 个部分:一部分分发给覆盖范围内的集群车辆;未下载完的一部分传输给目标车辆行驶方向上的RSUi+1,由于RSU 之间有大容量回程连接,因此该部分数据传输时延可忽略[18]。由RSUi+1根据反向协助车辆数量及可转发数据量将这部分数据分发给各个反向协助车辆。
阶段3当目标车辆驶出RSUi的覆盖范围时,同向的协助车辆将竞争性地将自己所下载数据转发给目标车辆,目标车辆接收完毕,反向协助车辆将以转发方式将自己所携带数据顺序转发给目标车辆。
本文主要关注通过协助通信所能增加的下载数据量,所以假设文件在1 个下载周期内不能完成,否则将无意义。
2.3 协作传输过程分析
在1 个下载周期内,目标车辆接收到的数据主要来源于3 个部分,分别是经过RSUi时下载的数据,以及同向和反向协助车辆下载并转发给目标车辆的数据。而目标车辆也处在同向集群中,获取到RSU的时空资源和其他协助车辆相同。因此,将目标车辆自身下载的数据量归并至同向集群下载的总数据量。所以,1 个周期内可获得的总数据量为:

其中:E[Dsame]同向协助下载总数据量,包含目标车辆自身下载数据量;E[Drev]是反向车辆转发的数据量。下文将对传输过程分别进行分析。
2.3.1 同向集群协助下载数据量
目标车辆可获得的同向协助下载数据量与集群内部车辆数及单个车辆可下载数据量相关,可表示为:

其中:E[Nsame]为集群内部车辆数量,包括目标车辆;为单个车辆节点下载的数据量。
而对于协助车辆数量,可表示为[19]:

其中:Pd是车辆成为集群内部最后一辆车的概率,可表示为:
车辆到达近似服从参数为λs的泊松分布,因此在停留时间T内,即RSU 覆盖范围内同时有k个车辆的稳态概率为:

其中:λs=ρsνs为泊松分布中车辆到达率;T=车辆经过RSU 覆盖范围的停留时间。定义RSU 的利用率p为RSU 至少为一辆车服务的概率,由于RSU 覆盖范围的车辆争夺其带宽资源,因此p也就是在RSU 覆盖范围内至少有一辆车的稳态概率,可通过式(8)计算在停留时间t内平均每辆车可接收到的数据量:

其中:Ttotal代表截止到时间t,路侧单元为其覆盖范围内至少一辆车服务的总时间;ntotal代表截止到时间t,被服务的总的车辆数;λeff为RSU 覆盖范围内的车辆有效到达率;f(0)和f(c)即为系统空闲和阻塞的概率,c表示RSU 覆盖范围所能容纳的最大车辆数,c=2Ri·ρjam。因此,式(10)即表示每辆车可接收到的数据量为数据传输速率与此辆车被RSU 服务的时间的乘积,而数据传输速率B又与所处区域相关,区域ci对应的车辆停留时间为Ti=其中Li为区域ci的长度,并且是车辆在RSU 内停留的总时间,即每辆车在RSU 覆盖范围内所得到的服务时间有的部分是以速率Bi进行数据传输的。每个车辆经过RSU 时可下载的平均数据量为:

2.3.2 同向协助下载数据的转发时间
反向协助车辆数的计算与同向协助车辆转发结束时间有关,因为考虑反向协助车辆转发数据发生在同向协助车辆完成转发之后,会减少传输冲突。因此,要先计算同向协助车辆的转发时间,可表示为:

其中:Γi,j为集群内除目标车辆外任意2 个节点传输的吞吐量,即每次传输中单个节点发送的有效载荷量。由于进入盲区时协助车辆将争相向目标车辆转发数据,在协助车辆间势必会引起传输碰撞,因此本文考虑将IEEE 802.11b DCF(分布式协调功能)协议应用于MAC 层竞争转发过程,并采用RTS/CTS 机制消除传输的隐藏终端[20]。令W表示车辆节点指数退避过程中最小竞争窗口大小,τ表示每个车辆节点的平均传输概率,则有:

因此,某一车辆节点传输数据冲突的概率为余下节点中至少有1 个节点也在同一时隙内传输数据的概率,则数据包传输冲突的概率为:

某一车辆节点在某一时隙内成功传输的概率为:

集群内部某一车辆节点向目标车辆发送数据的MAC 层吞吐量为:

其中:L为有效负载即数据包长度;E[Tslot]为1 个时隙的平均长度。式(14)表示在1 个时隙的持续时间内,集群内部某一节点以概率Psuc传输数据成功,并将传递有效负载L,对于E[Tslot]有:

其中:Tslot为DCF 协议中单位时隙的持续时间;Tcol为传输冲突的平均时间长度;Tsuc为传输成功的平均时间长度,而:

其中:SIFS 和DIFS 是为DCF 信令和操作保留的预定义时间间隔;SIFS 是短帧间间隔;DIFS 是分布式帧间间隔;RTS、CTS、ACK 分别表示RTS、CTS、ACK 帧传输的时间间隔,具体数值将在后续给出。所以,经上述分析可得最终的同向协助车辆的转发时间Tsame。因此,同向协助方式获得的吞吐量为:

2.3.3 反向协助车辆下载数据量
同向协助车辆转发完成之后,目标车辆将陆续与反向车辆相遇,从而进行交互通信。转发反向协助车辆下载总数据量为:

其中:E[Nrev]为反向协助车辆数;为单个反向车辆节点下载的数据量。
而对于RSUi+1给每个反向协助车辆分发的数据量,应该足够反向协助车辆在与目标车辆相遇的时间内转发,即:


对于反向协助车辆的选择,当同向集群协助车辆向目标车辆转发完毕时,目标车辆即开始接收所相遇的反向协助车辆的数据转发。当RSUi+1收到RSUi发来的数据即收到协助下载请求时,计算其List 列表中每辆车与目标车辆的相遇时间等信息,并选取适当车辆按序存入集合M=中,其中:Sn、En分别表示反向第n辆车与目标车辆开始通信和结束通信的时间;Tn表示第n辆车在RSUi+1中被选为协助车辆的时间[21]。根据注册表中的车辆信息,可得:

其中:ts是目标车辆进入RSUi的时间。
为避免传输冲突,造成数据转发失败,在协助车辆节点转发数据时,应该在前一节点转发完成之后进行,所以对于反向协助车辆i和其后车辆j,有:

而对于反向协助车辆与目标车辆通信,应该发生在同向协助车辆给目标车辆转发完毕之后,所以应满足:

对于反向协助的最后一个车辆节点,应该在目标车辆驶入RSUi+1之前就转发数据结束,因为目标车辆一旦进入RSUi+1的覆盖范围,则可以从RSUi+1直接下载未完成的数据量,享受更大带宽,所以得出:

因此,对于RSUi+1选择的反向协助车辆数E[Nrev],通过式(19)即可得出反向协助车辆下载总数据量E[Drev]。因此,在反向协助方式下可获取的吞吐量为:

综上,可得所提方案下目标车辆可获得的总体吞吐量为:

3 仿真结果与分析
本节将对所提方案进行实验仿真,以验证所提方案的性能以及理论分析的准确性。仿真工作基于MATLAB 进行,仿真场景为双向高速公路场景。相邻RSU 之间的间距范围为2~16 km,取定值时设定为8 km,则中间盲区距离为7 200 m。RSU 覆盖半径取值范围为300~500 m,取定值时为400 m,低速单车道拥塞状态下车流密度为0.071 vehicle/m,维持顺畅行驶时车辆速度为108 km/h[16]。V2I自适应通信速率及区域划分如表1 所示,具体场景参数设置如表2 所示,同向车辆转发数据过程中的相关MAC 层参数设置如表3所示。

表1 V2I 通信区域长度和数据传输速率Table 1 V2I communication area length and data transmission rate

表2 仿真参数设置Table 2 Simulation parameters setting
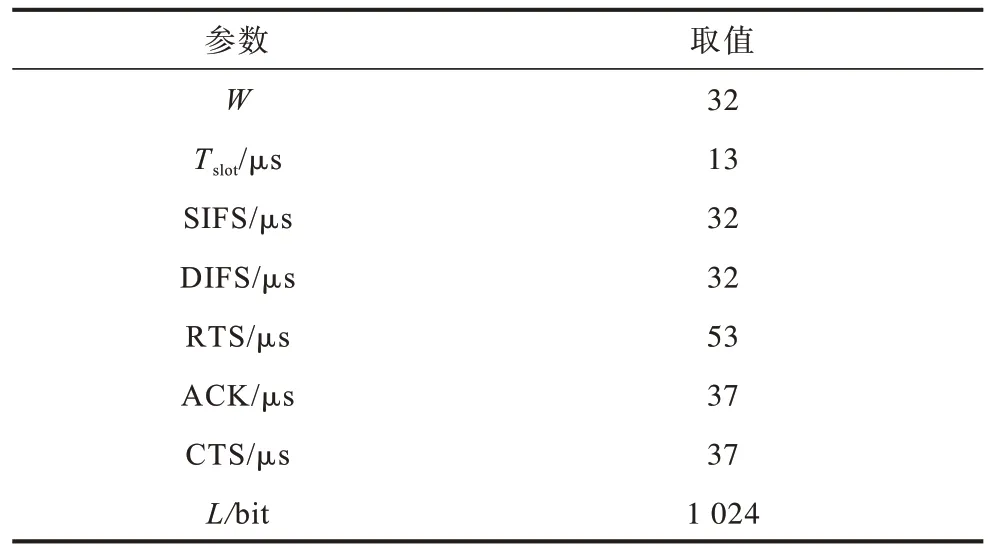
表3 MAC 层参数设置Table 3 MAC layer parameters setting
图4 所示为不同速度下单个协助车辆的数据下载量随RSU 內停留时间的变化情况。其中RSU 覆盖半径固定为400 m。可以看出,随着车辆速度的增大,单个车辆下载数据量在不断减少,当速度分别为60 km/h、80 km/h、100 km/h 时,所下载数据量大约为15 MB、11.5 MB、9 MB。主要原因在于:随着车辆速度的增大,车辆在RSU 内停留时间减少。并且,由于考虑了车辆移动性对数据传输速率的影响,车辆行驶在RSU 覆盖范围时采用自适应通信速率,因此在RSU 覆盖范围的中部比两边下载数据量多。因此,为最大限度地提升数据下载量,可对车辆行驶速度进行相应控制。

图4 不同速度下单个车辆数据下载量的变化情况Fig.4 Changes in data downloads of single vehicle at different speeds
图5 所示为固定车辆行驶速度为90 km/h 时,单个车辆数据下载量随RSU 覆盖范围的变化情况。可以看出,RSU 的覆盖范围变化对单个车辆数据下载量影响不大。当RSU 通信半径从300 m 增加到500 m 时,数据下载量最大值均在10.3 MB 左右。主要原因在于:随着RSU 通信半径的扩大,车辆停留时间增大,本应下载更多的数据量,但覆盖范围内竞争接入RSU 的车辆也增多,导致单个车辆被服务时间减少,并且竞争接入带来的数据传输碰撞可能性增大,影响数据下载量。

图5 不同RSU下单个车辆数据下载量的变化情况Fig.5 Changes in data download volume of single vehicle under different RSU
图6 所示为盲区间隔对目标车辆总数据吞吐量的影响,而盲区间隔又与RSU 部署间距相关。当盲区间隔为0 时,目标车辆仅从RSU 内下载数据;当盲区间隔较小时,由于未与反向车辆相遇,数据下载量主要来自于目标车辆自身和同向协助车辆,虽然盲区间距的增大使得目标车辆接收同向转发数据量增多,但也造成了停留时间的增长,因此对吞吐量影响不大。而目标车辆能够接收反向转发数据得益于间隔的持续增大,并且由于反向协助方式不存在竞争转发,因此吞吐量略高于同向协助。而当间距继续增大,同向转发完成,还未与反向车辆相遇时,则会造成吞吐量的持续下降。

图6 目标车辆吞吐量随DA 间距的变化情况Fig.6 Change of target vehicle throughput with distance between DA
图7 所示为在1 个下载周期内下载数据总量在不同协助下载策略下的比较。车速设定为25 m/s,整个下载周期为320 s,目标车辆在RSU 内停留时间为32 s。因此,在无协助方式下,车辆仅能依靠所处RSU 进行数据下载。在初始32 s 之内,可下载数据量为10 MB 左右,之后便无法进行数据下载,只能等待进入下一个下载周期。由于目标车辆可获得的数据总量受同向协助和反向协助的影响,而盲区前程由同向协助方式占主导,反向协助在同向转发完成后才开始。因此,虽然两者单独作用时下载数据量分别可达209 MB 和178 MB 左右,但总的协助数据下载量约为302 MB 左右,略低于同向与反向单独作用之和。可以看出,本文所提方案相较于已有的同向协助下载和反向协助下载数据下载量提升均在40%以上。

图7 目标车辆获得数据总量随时间的变化曲线Fig.7 Curve of total amount of data obtained by target vehicle over time
图8 所示为目标车辆与反向车辆进行通信时,数据吞吐量随时间的变化情况。在同向车流速度设定为90 km/h 时,整个下载周期为320 s,由图7 可知,同向转发完成时间在246 s 左右,因此,目标车辆与反向车辆有效通信时间为74 s 左右。由于车流密度的存在,反向车辆节点与目标车辆相遇进行数据转发的连续性会受到影响,即反向车辆节点之间会出现间隔,因此数据吞吐量随时间增长略有下降。当反向车流速度降为72 km/h 时,虽然两者通信时间变长,但是由于相应的车流密度有所增大,反向车辆与目标车辆相遇连续性受影响较小,因此数据吞吐量较速度大时略有增长。
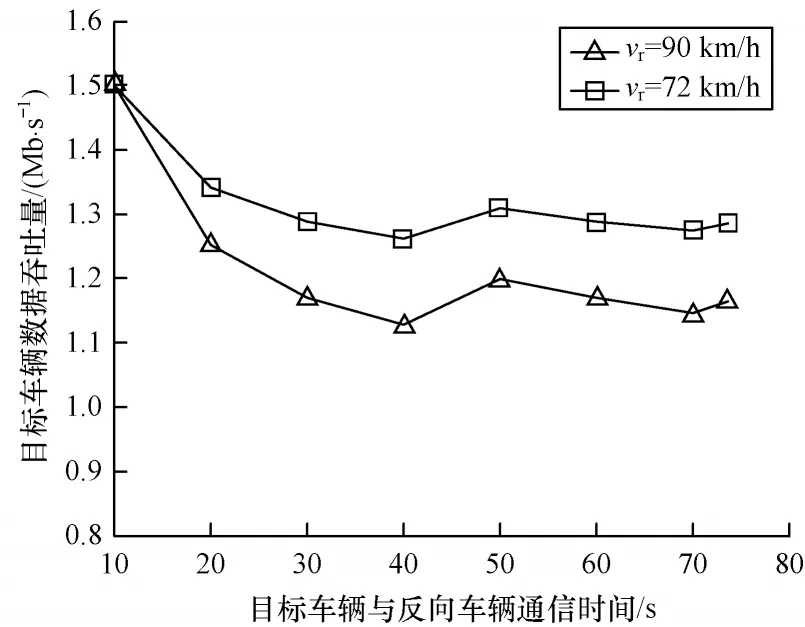
图8 目标车辆与反向车辆通信时吞吐量随时间的变化曲线Fig.8 Throughput curve of the target vehicle communicating with the reverse vehicle over time
4 结束语
为减少车辆在RSU 部署稀疏区域的盲区数据传输中断的影响,本文提出一种协作数据分发方案。结合同向协助下载和反向协助下载,与目标车辆同向的车辆形成协助集群,反向协助车辆利用转发的方式为目标车辆提供协助下载,并考虑车辆与路侧单元之间的竞争接入与传输速率、车辆间传输的竞争转发、同向转发完成时间等对数据传输的影响。仿真结果表明,该方案相较于同向协助下载和反向协助下载机制,可有效提升目标车辆在1 个下载周期内的数据下载量,提高了盲区利用率,减少了盲区中数据传输中断的影响。本文考虑的是移动稳定性较高的高速公路场景,下一步将研究更结合实际的城市道路场景,对复杂的交通状况加以分析,并考虑多普勒频移对数据传输的影响。
